"基于PLC与组态王Kingview6.50的机械手控制设计"
200 浏览量
更新于2023-12-04
收藏 6.68MB DOC 举报
本文是一篇关于基于PLC与组态王kingview6.50实现对机械手的控制设计的本科学位论文。作者是西南科技大学机械工程系2012级2班的学生,指导教师为机电一体化专业的教师。本文的主要任务是通过PLC完成对一个5自由度的机械手模型控制,使其完成一系列的生产动作过程,并使用组态王软件对机械手进行监控,将机械手的动作过程进行了动画显示。该设计所使用的机械手系统包括三菱FX2N-48MT PLC主机、机械手(滚珠丝杆、滑轨)、Syntron 42BYG250C 步进电机及其驱动器、传感器、光电编码器、气动元件等组成,可实现机械手的上下移动、左右移动、底盘旋转等功能。
在摘要部分,作者指出在工业生产等相关领域内,会有一些高温、腐蚀及有毒气体出现在工作环境中,危害了操作人员的健康,增加了工人的劳动强度。而机械手可以解决这些问题。机械手可以在空间抓、放、搬运物体,动作灵活多样,从而替代人工操作,适用于可变换生产品种的中、小批量自动化生产。
论文的内容主要包括引言、机械手系统的选型与设计、机械手的控制原理、PLC编程与KingView监控软件的设计与实现、系统调试与运行等方面。在引言部分,作者介绍了机械手在工业生产中的重要性以及本文设计的背景与意义。在系统的选型与设计部分,作者对所使用的机械手系统进行了详细的介绍与分析,包括各个关键部件的选型依据与参数设计。在机械手的控制原理部分,作者阐述了机械手的运动原理、控制要点与控制方案的选择。在PLC编程与KingView监控软件的设计与实现部分,作者详细描述了PLC的程序编写过程以及KingView监控软件的界面设计与功能实现。在系统调试与运行部分,作者介绍了整个系统的调试过程与结果展示,并进行了相应的分析与总结。
在本文中,作者在控制原理与软件实现方面做了较为详细的论述与实践操作,对于本科生毕业设计来说,是一篇较为扎实的论文。另外,本文的文献综述与引用也比较充分,从理论到实践都有较为完整的参考内容,充分体现了作者在相关领域的学术研究能力与实践能力。但在论文的写作与结构方面,还有一些可以提升的地方,主要是在逻辑结构的衔接与表达方式的准确性上。整体来看,这是一篇较为扎实的本科毕业设计论文,对于相关领域的学习与研究有一定的借鉴意义。
西南科技大学本科生毕业设计(论文)
6
2.机械手控制方式的选定
PLC 实现的自动控制系统,其控制功能基本都是通过设计软件来实现的,这种软件
是利用 PLC 厂商提供的指令系统,根据机械设备的工艺流程来设计。
PLC 自问世以来,经过 20 多年的发展,在美国、欧洲、日本等工业发达国家已成为
重要产业,当前,PLC 在国际市场上已成为最受欢迎的工业控制畅销产品,用 PLC 设计
自动控制系统已成为世界潮流。
PLC 之所以有生命力,在于它更加适合工业现场和市场的要求:高可靠性、强抗各
种干扰的能力。编程安装使用简便、低价格长寿命。比之单片机,它的输入输出端更接
近现场设备,不需添加太多的中间部件或需要更多的接口,这样节省了用户时间和成本。
PLC 的下端(输入端)为继电器、晶体管和晶闸管等控制部件,而上端一般是面向用户
的微型计算机。人们在应用它时,可以不必进行计算机方面的专门培训,就能对可编程
控制器进行操作及编程,用来完成各种各样的复杂程度不同的工业控制任务。
PLC 具有很多的优点。机械手控制系统若采用 PLC 控制,体积小、重量轻、控制方
式灵活、可靠性高、操作简单、维修容易。由于 PLC 所具有的灵活性、模块化、易于扩
展等特点,可以根据现场要求实现机械手的不同工作要求。机械手采用 PLC 控制技术,
可以大大提高该系统的自动化程度,减少了大量的中间继电器、时间继电器和硬件接线,
提高了控制系统的可靠性。同时,用 PLC 控制系统可方便地更改生产流程,增强控制功
能。
上述的选择方案各有优缺点,这次对于控制系统的设计不需要选择速度最快的硬件
器件,也不需要可视化的图形编程语言和平台,而是在达到设计要求的前提下,尽量降
低系统的运行速度和开发成本,提高了系统运行的稳定性。且要求能方便地更改工作流
程,完成复杂的运动控制。
综上所述,机械手的控制方式选择 PLC 控制。
(二)PLC 简介
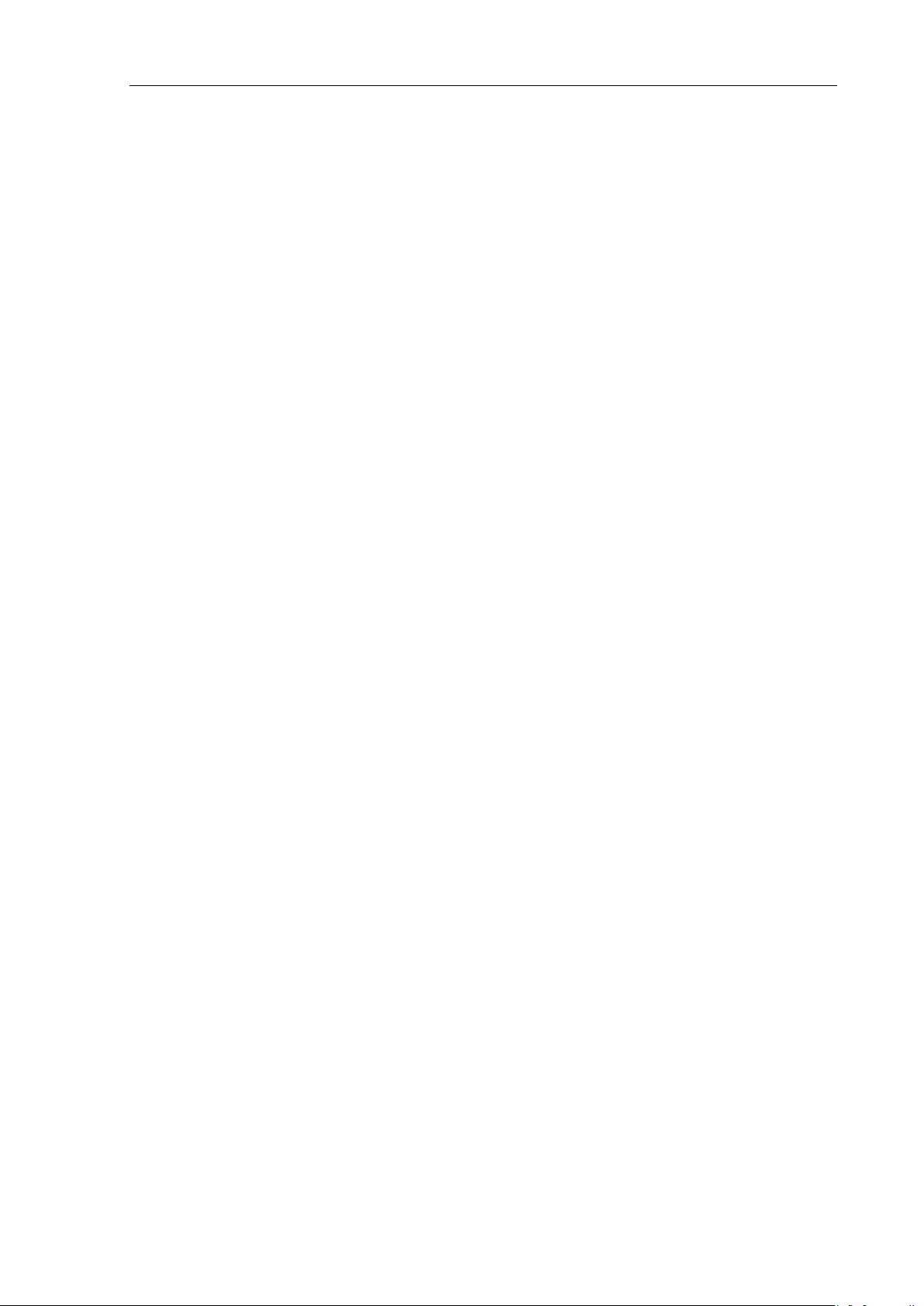
PLC 和一般的微型计算机基本相同,也是由硬件系统和软件系统两大部分组成的。
PLC 的硬件系统由微处理器(CPU)、存储器(EPROM,ROM)、输入输出(I/O)部件、电源
部件、编程器、I/O 扩展单元和其他外围设备组成。各部分通过总线(电源总线、控制总
线、地址总线、数据总线)连接而成。其结构简图如下:
剩余48页未读,继续阅读
383 浏览量
点击了解资源详情
102 浏览量
2023-07-09 上传
2022-11-23 上传
2023-07-02 上传
2023-07-09 上传
439 浏览量

Mmnnnbb123
- 粉丝: 764
- 资源: 8万+
 我的内容管理
展开
我的内容管理
展开







