"北京汉库科技有限公司HGR-3HV-C双足机器人步伐源代码手册详解"
需积分: 48 179 浏览量
更新于2023-12-16
2
收藏 9.07MB DOC 举报
《HGR-3HV-C步伐源代码手册》是由北京汉库科技有限责任公司发布的一份详细介绍该公司研发的HGR-3HV-C型号双足机器人代码的手册。本手册共计101页,内容涵盖了机器人代码的各个部分和每个肢体动作的程序详解。
双足机器人是一种模拟人类步行的机器人,具有自主行走和平衡功能。为了实现这一目标,机器人的代码起着关键作用。《HGR-3HV-C步伐源代码手册》通过详细介绍各个代码部分,帮助用户了解机器人的控制原理和动作运行过程。
手册的首部给出了汉库科技有限责任公司的联系方式,包括电话和传真号码以及官方网站,方便读者在需要时进行联系和查询。接下来的页码标注清晰,便于读者快速翻阅查找所需内容。
手册的内容主要以代码介绍为主,分为多个章节,每个章节针对机器人代码的一个特定方面进行了详尽的阐述。通过代码的解读,读者可以深入了解机器人运动的原理和控制过程。
此外,在介绍代码的同时,手册还配有相关的图片和图表,用于配合文字说明,使读者更加直观地理解机器人的动作和运行过程。这些图片和图表包括了机器人的结构示意图、关节角度和力传感器的变化曲线等。
除了代码介绍外,手册还包含了一些实例程序,以帮助读者更好地理解和运用机器人代码。这些实例程序是基于机器人的真实情况和实际需求编写的,并且配有详细的注释,使读者能够准确地理解每一行代码的功能和作用。
《HGR-3HV-C步伐源代码手册》的编写符合技术文档的要求,语言简洁明了,结构合理,内容详实全面。对于工程师、研究人员和对双足机器人有兴趣的读者来说,这本手册是一份宝贵的参考资料。
总的来说,本手册通过详细介绍HGR-3HV-C型号双足机器人的步伐源代码,向读者展示了机器人的控制原理和动作运行过程。其中涵盖的内容丰富全面,通过图片、图表和实例程序的配合,使读者更好地理解和运用机器人代码。这份手册对于深入研究双足机器人技术和开发相关应用具有重要意义。
HANGOOD
北京汉库科技有限责任公司
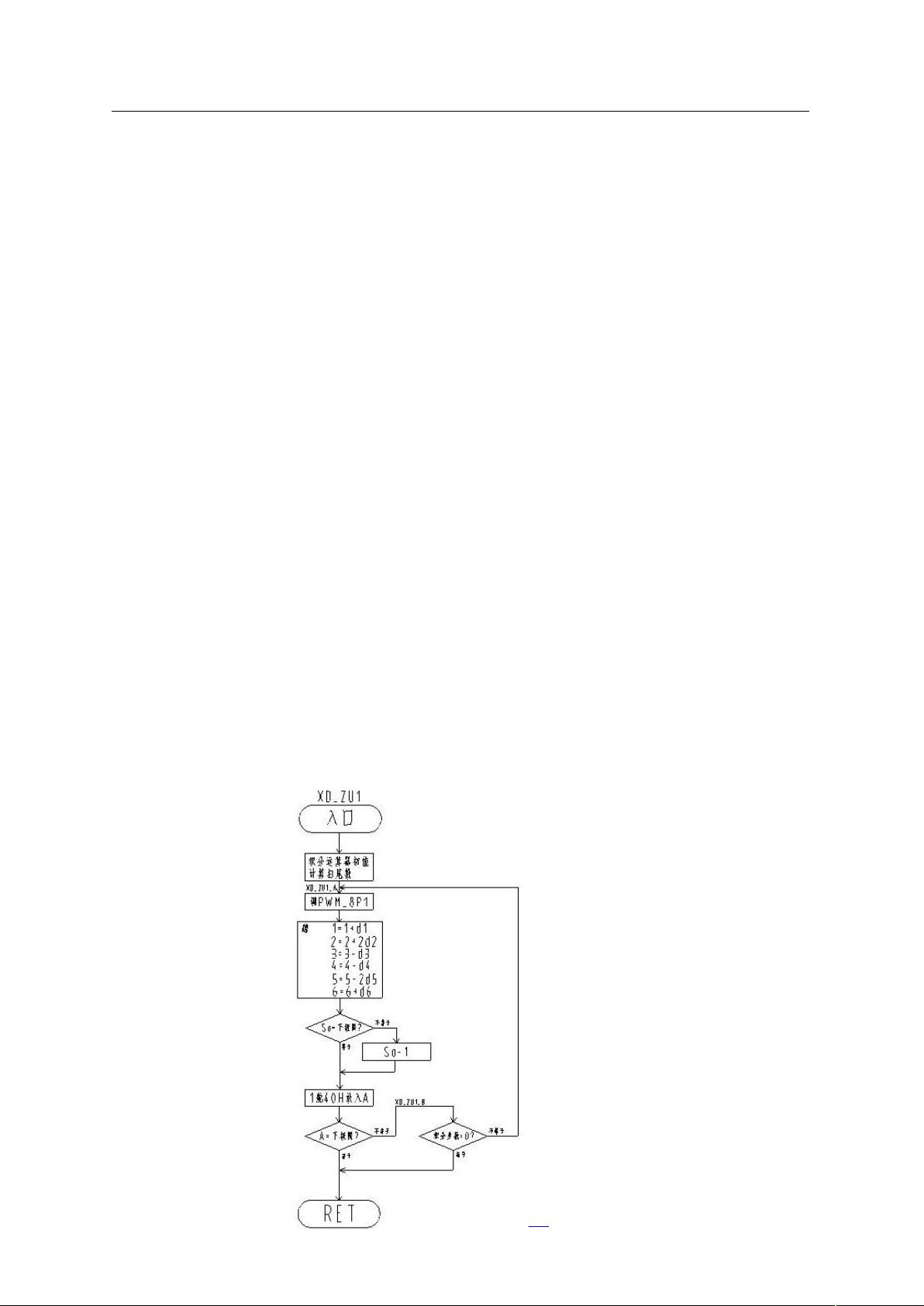
(1)下蹲第 1 族子程序
系统会自动执行每个微分元的动作位置,自动提取并装入初始位置,自动进行积分步数
合理性判断。(XD_ZU1)
扫尾系数最大为:Sa=40
下蹲过程的积分步数最大为:Ea=76,
有 1 个问题摆出来了,那就是 76 与 40 的换算关系。
我们发现积分步数不一定能够达到 76,过程中出现在 1/2*67 的概率最大,即为 38。
那么 38≈40 ,所以在算法上采取,将 Ea 的直接放入 Sa 的初值。
我们发现当积分步数 Ea 较小时,腿部转动角度也较小,则启动速度可以快些,系统能够保持
稳定,也就是说扫尾数初值可以小些,即 Sa 较小。
我们还发现当积分步数 Ea 较大时,腿部转动角度也较大,则启动速度要求慢些,系统能够保
持稳定,也就是说扫尾数初值可以大些,即 Sa 较大。
依据以上的机械运动特性,我们推出以下公式:
初始时 Sa = Ea ; 过程中 1≤Sa≤Ea
伴随着系统运动,积分步数 Ea 逐渐减小,速度参数 Sa 逐渐减小,速度逐渐加快;
属于第 1 族运动方式,即积分停止时加速度反向且值最大。
用户输入:运动方式编码、积分步数(该数值可以合理也可以不合理)
程序出口:所有舵机的位置,系统稳定系数(“1”稳定,“0”不稳定)
下蹲第 1 族子程序算法
____________________________________________________________________________________________________
Tel:010-82782762 Fax:010-62965267 http://www.hangood.com 第 11 页/共 101 页


剩余63页未读,继续阅读
2019-09-14 上传
2021-06-30 上传
2022-06-30 上传
2023-05-11 上传
2023-05-19 上传
2023-11-23 上传
2023-03-29 上传

科技眼
- 粉丝: 282
- 资源: 44
 我的内容管理
展开
我的内容管理
展开







最新资源
- OptiX传输试题与SDH基础知识
- C++Builder函数详解与应用
- Linux shell (bash) 文件与字符串比较运算符详解
- Adam Gawne-Cain解读英文版WKT格式与常见投影标准
- dos命令详解:基础操作与网络测试必备
- Windows 蓝屏代码解析与处理指南
- PSoC CY8C24533在电动自行车控制器设计中的应用
- PHP整合FCKeditor网页编辑器教程
- Java Swing计算器源码示例:初学者入门教程
- Eclipse平台上的可视化开发:使用VEP与SWT
- 软件工程CASE工具实践指南
- AIX LVM详解:网络存储架构与管理
- 递归算法解析:文件系统、XML与树图
- 使用Struts2与MySQL构建Web登录验证教程
- PHP5 CLI模式:用PHP编写Shell脚本教程
- MyBatis与Spring完美整合:1.0.0-RC3详解
