库卡机器人初次通电指南:从电气连接到安全配置
需积分: 50 83 浏览量
更新于2024-07-17
收藏 3.95MB PDF 举报
"库卡(KUKA)机器人初次通电说明文档主要针对初次使用KUKA机器人的集成商和终端用户,旨在指导他们正确完成机器人从到货到首次通电及正常操作的全过程。文档包括四个主要部分:电气连接、初次上电、安全配置和机器人零点校正。在电气连接部分,详细介绍了控制柜和机器人本体的接口,包括不同型号控制柜的电源要求和接线方法,以及安全回路接口的连接。"
本文档是库卡(KUKA)机器人初次通电的指南,特别适合那些第一次接触KUKA机器人的用户。首先,它明确了文档的目标群体,即需要对新到货的KUKA机器人进行首次操作的集成商和终端用户。接着,文档分为四个关键步骤,以确保用户能够按照指导顺利进行。
第一步,电气连接,涉及到控制柜与机器人之间的电源接口。KUKA提供了不同型号的控制柜,如KRC4stand、KRC4Midsize、KRC4Extend、KRC4Compact和KRC4Smallsize,它们有不同的电源需求。例如,KRC4stand和KRC4Midsize需要380VAC三相四线制电源,而KRC4Compact和KRC4Smallsize则使用220VAC电源。每个接口都有明确的标识,用户应根据实际情况进行正确接线。
第二步,初次上电,可能涉及的步骤包括检查所有连接是否正确,然后按照规定顺序开启电源。
第三步,安全配置,这部分强调了机器人系统的安全回路,特别是急停和安全门信号的设置。对于KRC4stand、KRC4Midsize和KRC4Extend控制柜,用户需将这些安全信号接入相应装置,如果不需要,则需短接相关通道。
第四步,机器人零点校正,这是确保机器人能够准确执行任务的关键步骤。用户需要按照手册指示,通过特定的程序或硬件设备来设定机器人的参考点。
这份文档提供了一个详细且实用的流程,帮助用户避免在首次使用KUKA机器人时遇到的操作问题,确保机器人能够安全、有效地投入工作。对于任何打算使用或已经拥有KUKA机器人的个人或企业,这份文档都是不可或缺的参考资料。
www.kuka-robotics.com
KUKA Roboter GmbH | 06.06.2010 | 第 5 页
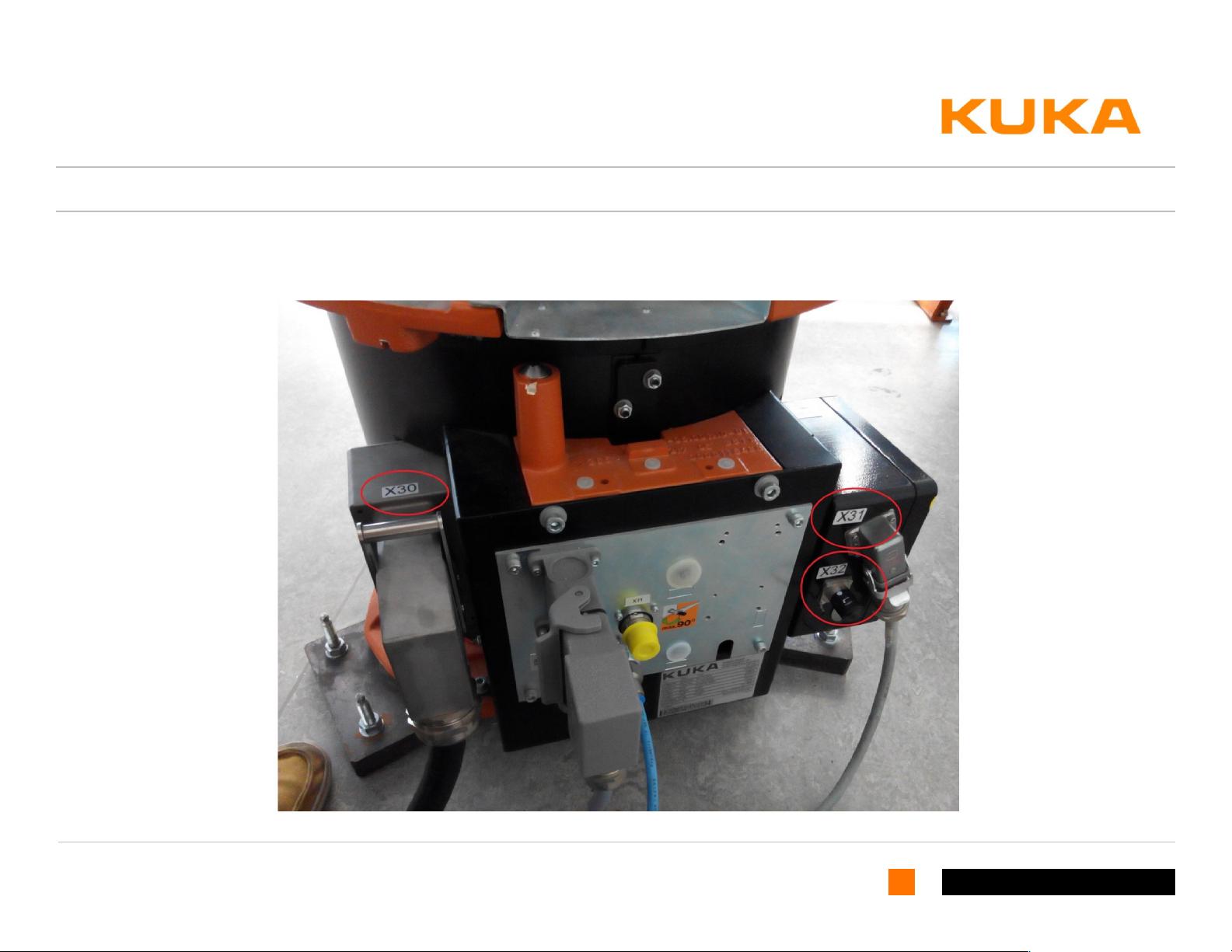
机器人本体接口图示如下:
机器人初次通电——电气连接
剩余22页未读,继续阅读
2015-06-09 上传
2020-08-04 上传
2020-02-04 上传
2023-06-05 上传
2021-10-11 上传
2020-03-04 上传
2023-03-03 上传

龙哥的内裤
- 粉丝: 22
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- Cucumber-JVM模板项目快速入门教程
- ECharts打造公司组织架构可视化展示
- DC Water Alerts 数据开放平台介绍
- 图形化编程打造智能家居控制系统
- 个人网站构建:使用CSS实现风格化布局
- 使用CANBUS控制LED灯柱颜色的Matlab代码实现
- ACTCMS管理系统安装与更新教程
- 快速查看IP地址及地理位置信息的View My IP插件
- Pandas库助力数据分析与编程效率提升
- Python实现k均值聚类音乐数据可视化分析
- formdotcom打造高效网络表单解决方案
- 仿京东套餐购买列表源码DYCPackage解析
- 开源管理工具orgParty:面向PartySur的多功能应用程序
- Flutter时间跟踪应用Time_tracker入门教程
- AngularJS实现自定义滑动项目及动作指南
- 掌握C++编译时打印:compile-time-printer的使用与原理
