改进MeanShift与自适应Kalman滤波在视频目标跟踪中的应用
"基于改进MeanShift与自适应Kalman滤波的视频目标跟踪"
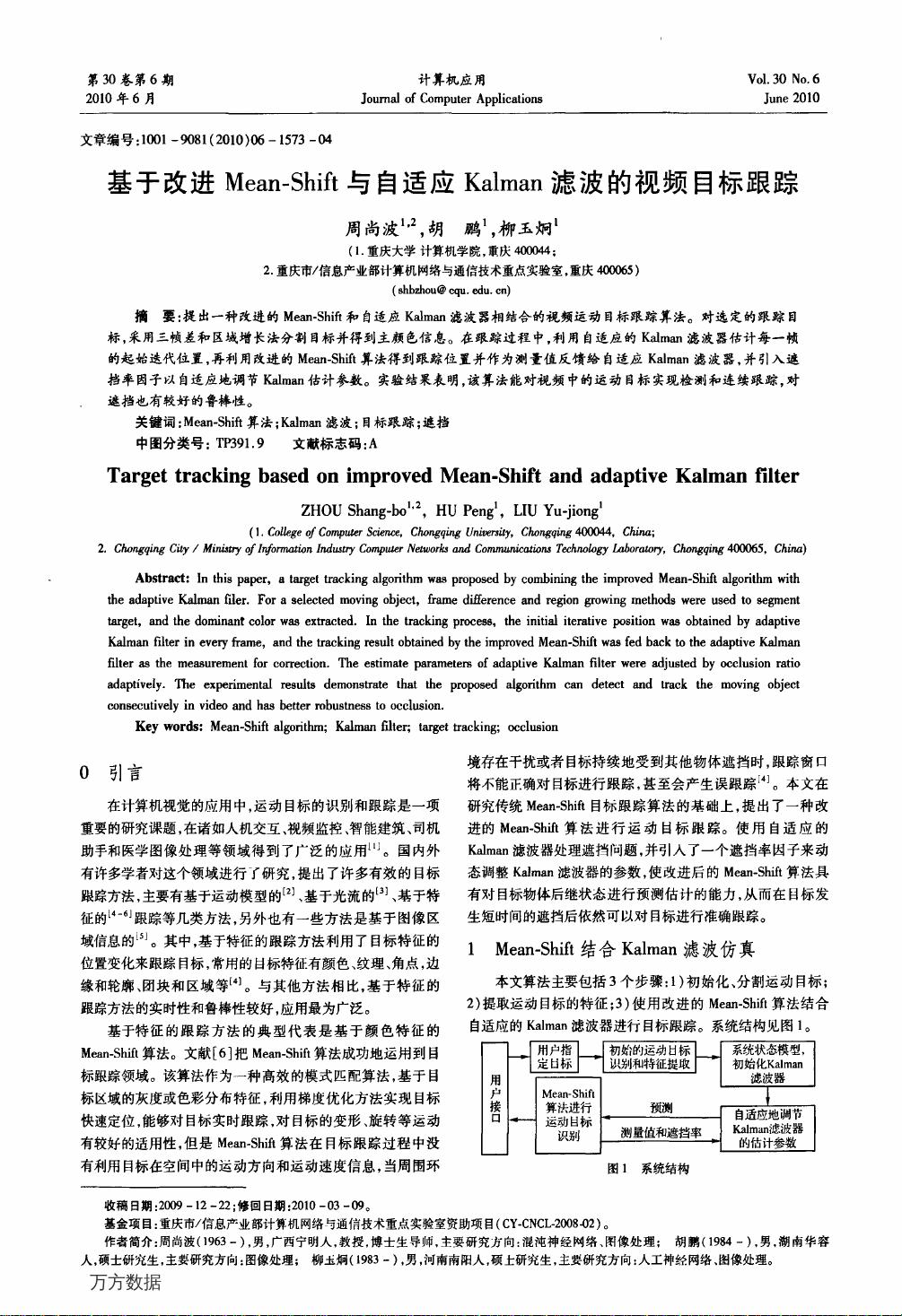
本文介绍了一种结合了改进MeanShift算法和自适应Kalman滤波器的视频目标跟踪方法,旨在提高运动目标在复杂环境下的跟踪性能,特别是针对遮挡情况具有较好的鲁棒性。在目标跟踪领域,这两者的结合可以有效提升跟踪的准确性和稳定性。
首先,文章提到使用三帧差分和区域增长法来初始化目标的分割和主颜色信息获取。三帧差分是通过比较连续三帧图像中像素的变化来检测运动目标,区域增长法则是一种常用的分割策略,它根据像素间的相似性将目标区域连接起来,从而提取出目标的边界。
接着,自适应Kalman滤波器用于估计每帧的起始迭代位置。Kalman滤波是一种统计滤波方法,它可以预测和更新目标的状态,尤其是在存在噪声的情况下。自适应版本则允许滤波器的参数根据跟踪过程中的变化动态调整,以更好地适应目标的运动特性。
然后,改进的MeanShift算法被用来确定跟踪位置。MeanShift是一种基于密度的聚类算法,它通过迭代寻找高密度区域,从而找到目标的位置。在此基础上的改进可能包括优化窗口大小、速度或颜色空间处理,以提高跟踪的精度和速度。
在跟踪过程中,算法会考虑遮挡率因子,以自适应地调节Kalman滤波器的参数。遮挡是视频目标跟踪中的一个主要挑战,当目标被其他物体部分或完全遮挡时,传统的跟踪方法可能会失去目标。通过引入遮挡率,算法可以适应这种情况,调整估计参数,使得即使在遮挡情况下也能保持对目标的有效跟踪。
实验结果显示,该算法能够成功地检测和连续跟踪视频中的运动目标,并对遮挡有良好的鲁棒性。这意味着在实际应用中,比如视频监控、自动驾驶等领域,这种结合改进算法的跟踪方法具有较高的实用价值。
关键词涉及的核心概念包括:MeanShift算法,用于寻找目标的高密度区域;Kalman滤波,用于预测和更新目标状态;目标跟踪,即在连续视频序列中定位和追踪特定对象;以及遮挡处理,是衡量算法在目标部分或完全被遮挡时跟踪能力的关键指标。
这篇文章提出的算法通过融合改进的MeanShift和自适应Kalman滤波技术,为视频目标跟踪提供了一种高效且适应性强的解决方案,尤其在面对遮挡问题时表现突出。
万方数据
下载后可阅读完整内容,剩余5页未读,立即下载
120 浏览量
2021-09-08 上传
101 浏览量
112 浏览量
610 浏览量
2008-09-06 上传
523 浏览量
118 浏览量
105 浏览量

haogang_hao1986
- 粉丝: 2
- 资源: 30
 我的内容管理
展开
我的内容管理
展开







最新资源
- WAP-209-MMSEncapsulation-20010601-a.pdf
- ejb3.0实例教程.pdf
- Spring 总结(1) 自用
- MPlayer中文文档
- Ant使用指南.pdf
- linux指令大全.doc
- manning_-_java_development_with_ant.pdf
- CatiaV5学习资料
- Hibernate In Action
- c语言百道编程题目和题目的分析讲解
- Java.Persistence.with.Hibernate.pdf
- 操作系统复习提纲计算机专业
- Hibernate原理與快速入門.pdf
- TortoiseSVN-1.5.6-zh_CN.pdf
- 基于51单片机的温度测量系统
- 中国3s发展现状调查
