PCS7 PIDTuner教程:参数整定与变增益控制
需积分: 32 187 浏览量
更新于2024-07-24
收藏 765KB PDF 举报
"这篇文档是关于西门子PCS7系统中PID控制器的使用教程,主要讲解了PIDTuner工具的入门使用方法,包括基本功能和扩展功能,适用于PCS7V7.1及其以上版本。"
文章详细介绍了PIDTuner这款在PCS7系统中用于PID控制器参数整定的工具。PIDTuner自PCS7V5.1版本开始引入,主要用于优化PID控制器。在PCS7V7.1及以后的版本中,它不仅支持标准库中的PID功能块,如CTRL_PID和CTRL_S,还增加了对APL库中PIDConL和PIDStepL等函数块的支持。值得注意的是,从PCS7V7.0开始,PIDTuner工具已经免费提供给用户使用。
PIDTuner的工作原理是通过收集在线PID功能块的背景数据块中的信息并记录数据,然后基于这些数据进行计算,得出最佳的控制器参数,以此来优化控制器性能。工具的界面分为两大部分,上半部分显示设定值、过程值和操控输出值的实时曲线,便于用户观察优化过程;下半部分则详细列出了优化步骤,指导用户一步步完成PID参数的整定。
在基本使用部分,文章详细阐述了9个步骤:
1. **过程回路类型选择**:用户首先需要确定控制回路的类型,如温度、流量等。
2. **设定开始点**:设置初始的控制器参数。
3. **设定目标点**:定义期望的控制器性能指标。
4. **数据收集**:开始收集控制器在当前参数下的运行数据。
5. **复位**:在数据收集完成后,对系统进行复位。
6. **控制器设计**:基于收集的数据进行控制器设计。
7. **选择控制器类型和参数**:根据需求选择合适的PID控制器类型(如P,PI,PD,PID)并设置相关参数。
8. **使用优化参数仿真**:在仿真环境中应用优化后的参数,检查控制器性能。
9. **应用参数**:最后将优化后的参数实际应用到控制器中。
在扩展功能部分,提到了两个高级应用:
1. **脉冲输出PID功能块的优化**:针对需要精确脉冲输出的场合,PIDTuner也能提供优化方案。
2. **变增益控制中使用PIDTuner**:在变增益控制策略中,PIDTuner可以帮助用户调整不同工况下的增益设置,以适应过程动态变化。
通过这些详细步骤,用户可以有效地利用PIDTuner来提升控制系统的稳定性和响应速度,确保过程控制的精准性。对于西门子PCS7系统的使用者来说,掌握PIDTuner的使用是提高系统自动化水平和效率的重要一环。
2 PID Tuner 基本使用
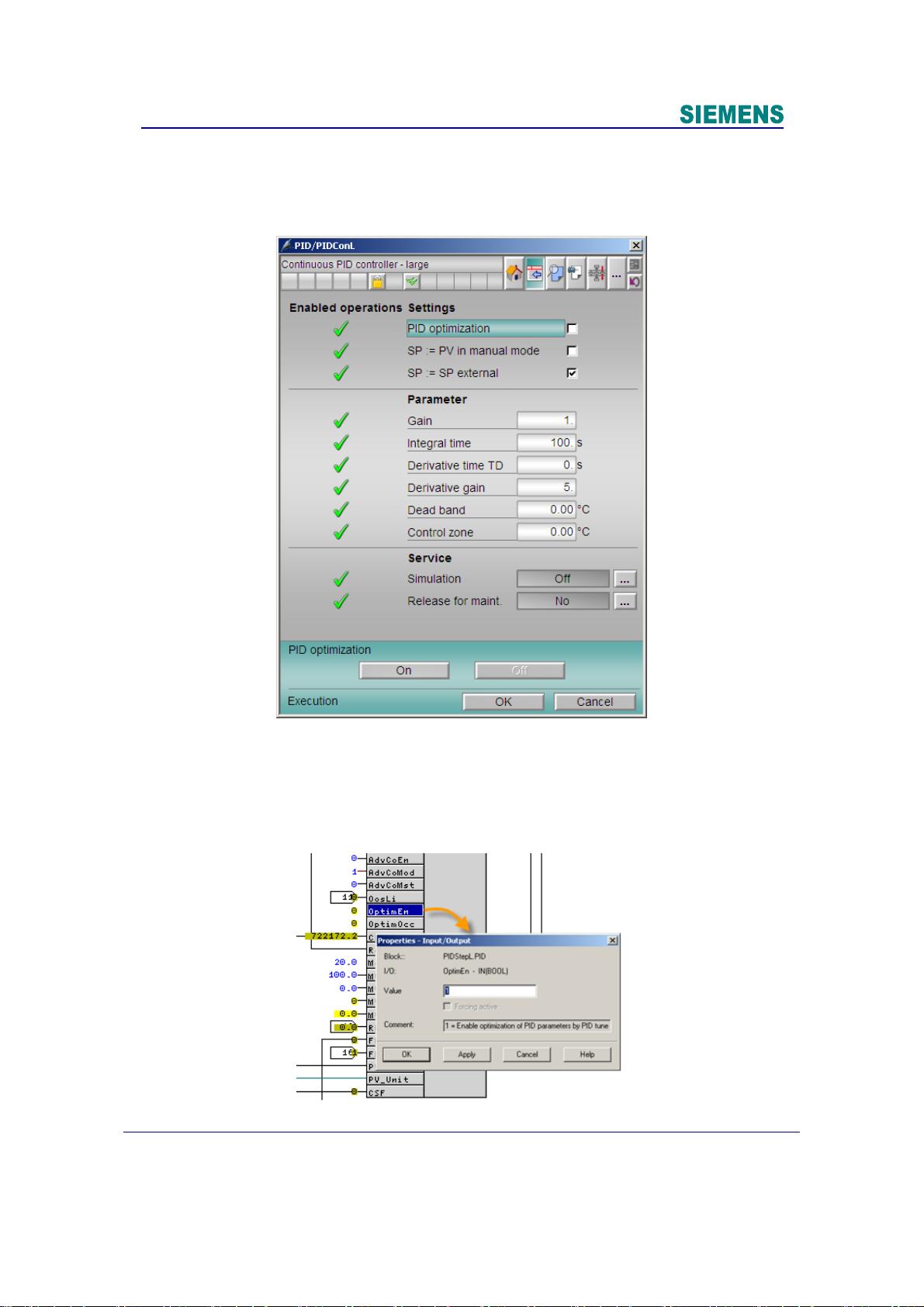
PID Tuner 一般在工程师站 ES 上执行,但在使用之前需要在 OS 或者 CFC 中进行使
能,以 PIDConL 功能块为例,在对应 ICON 的参数面板中使能优化功能:
图 2 在 OS 上使能优化功能
在上图中,比例、积分等参数都是可输入的。选中“PID optimization”,使能参数优化,
这些相关的参数都会被取消使能,不可修改。
除了在面板中使能之外,在 CFC 中也可以通过修改参数“OptimEn”来使能。
IA&DT Service & Support
Page 5-23
剩余22页未读,继续阅读
262 浏览量
225 浏览量
2012-07-23 上传
2024-11-10 上传
2024-11-02 上传
2024-11-01 上传
2024-11-10 上传
2024-11-06 上传
2024-11-01 上传

白衣布丁
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- skinrestorerfilegen
- katacoda方案:Katacoda方案
- 多功能便签效果
- JSPGenCMS 4.0 20160520
- SZFMBeadando
- XX种畜牧草良种繁殖场反季节蔬菜(萝卜)加工项目商业计划书.zip
- 开店损益评估表excel模板下载
- 电子邮件地址:Spring Cloud的餐厅服务,餐厅和餐厅
- capecodseedcoop
- html5lib-0.999999999.tar.gz
- Cloth-simulation:使用质量弹簧模型模拟布料
- vicky:Vicky 是使用 ffmpeg 将视频文件转换为声音文件的 GUI 程序
- perl-orm-easy:PostgreSQL数据库内ORM
- onlineSystem:基于SSH + BootStrap的在线考试系统
- 商场设计CAD图纸
- Dizi Haberleri-crx插件
