TI工业机器人设计手册:从控制器到通信
需积分: 14 57 浏览量
更新于2024-07-09
收藏 13.09MB PDF 举报
"TI-工业机器人设计工程师指南.pdf"
该资源是德州仪器(TI)发布的一份针对工业机器人设计工程师的专业指南,旨在帮助工程师们更好地理解和设计机器人系统。这份电子书涵盖了多个关键领域的技术细节,包括控制器、伺服驱动器、机械臂和驱动系统、传感和视觉技术、机器人工具技术以及工业通信。
1. **工业机器人系统简介**:这部分可能介绍了工业机器人的基本构成、工作原理以及在现代工业环境中的应用。它可能会涵盖机器人的运动控制、定位精度、负载能力等基本概念。
2. **机器人系统控制器**:章节深入讨论了控制器的设计,特别是如何利用Sitara™处理器进行工业4.0伺服驱动器的控制。内容涉及隔离式栅极驱动器的选择、电流参数理解、热管理、电机驱动控制的精度提升以及如何在宽温范围内优化功率级性能。此外,还提到了非分立式解决方案在简化三相逆变器设计中的作用。
3. **机械臂和驱动系统**:这部分关注于机械臂的动力系统,包括电池电源管理的热保护策略和位置反馈技术。提供的参考设计可能有助于实现更高效、安全的机械手操作。
4. **传感和视觉技术**:TI的毫米波雷达传感器在机器人应用中的作用、超声波传感的使用、传感器数据在AI中的角色,以及如何将机器学习引入嵌入式系统,都是这部分探讨的主题。这些技术提升了机器人在环境感知、自主决策和任务执行上的能力。
5. **机器人工具技术(末端执行器)**:通过TIDLP®技术驱动的结构光系统,实现了高精度的捡拾功能,这可能涉及到精密操作和抓取技术。
6. **机器人工业通信**:选择了适合传感器的工业通信标准,如何通过通信技术提高工厂自动化水平,以及对比传统系统展示了现代工厂的智能化程度。参考设计部分可能提供了关于实施这些通信协议的实际案例。
此指南作为工业机器人设计的重要参考资料,详细解析了从底层硬件到上层控制策略的各种技术,对于提升工业机器人设计的效率和质量具有极大的价值。
工业机器人设计工程师指南 14 2Q 2020 I 德州仪器 (TI)
第 2 章:机器人系统控制器
这种电力需求每天都在持续增加。不仅如此,人们希望立即
收到这些信息。这意味着,随着数据需求的增加,数据中心的
容量也在与日俱增;因此,电力输送系统需要提供越来越多
的电力。但是,数据中心的机房空间有限。扩大机房空间的成
本高昂,非常不经济。
解决此需求的一种方法是增加功率密度并确保隔离可靠性。
为实现此目的,可显著提高电源效率并增大电力传输率(也
称为开关频率,以kHz为单位)。此改进有助于减小电源单
元的尺寸。通过将隔离器与关键电源组件(即高速栅极驱动
器)集成在一起,可以实现隔离可靠性。这种集成器件便是大
家所知道的隔离式栅极驱动器。
栅极驱动器功能
为了进一步了解这种集成解决方案的价值,首先需要了解如
何使用栅极驱动器。栅极驱动器在采用开关模式电源的系统
中实现,其中的电源开关在 ON 和 OFF 模式下工作,因此理
论上在高开关频率下具有零功耗。两种常用的电源开关是
功率 MOSFET和IGBT。开关模式电源在基于控制器的闭环
电源拓扑中运行。对ON/OFF状态的控制在这些开关的栅
极上进行,旨在调节电压和通过开关的电流。让我们以功率
MOSFET为例。图1 说明了栅极端子的工作原理。
图1.控制电源开关中的栅极端子。
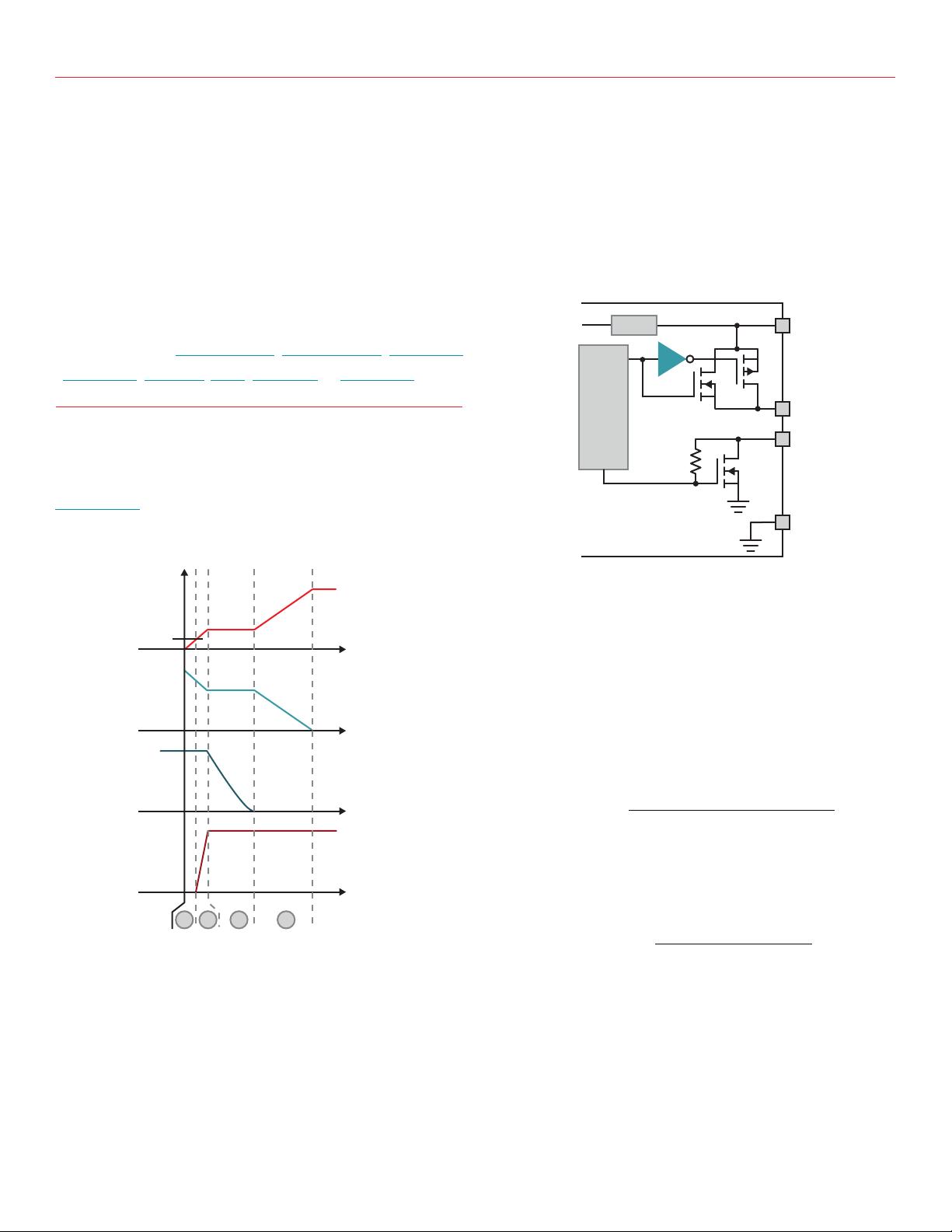
首先,栅极(GATE)端子控制MOSFET的ON/OFF状态。VGS
表示栅极与源极之间的电压。
• 要开启(ON),请施加正电压,VGS>阈值电平.
• 要关闭(OFF),请降低VGS<阈值水平.
• 栅极(GATE)是具有高阻抗的电容输入端。
• 它具有CGS和CGD作为MOSFET内部结构中的两个寄
生电容.
这便是栅极驱动器的用武之地。它充当功率放大器,接受来
自控制器IC的低功率输入,并产生适当的大电流栅极驱动
以使功率MOSFET开通或关断。
隔离式栅极驱动器与传统变压器隔离
对于高压应用(例如数据中心电源),根据控制器的放置位
置,需要在控制器和驱动器之间进行隔离。一种传统的隔离
方法是使用栅极驱动器变压器。
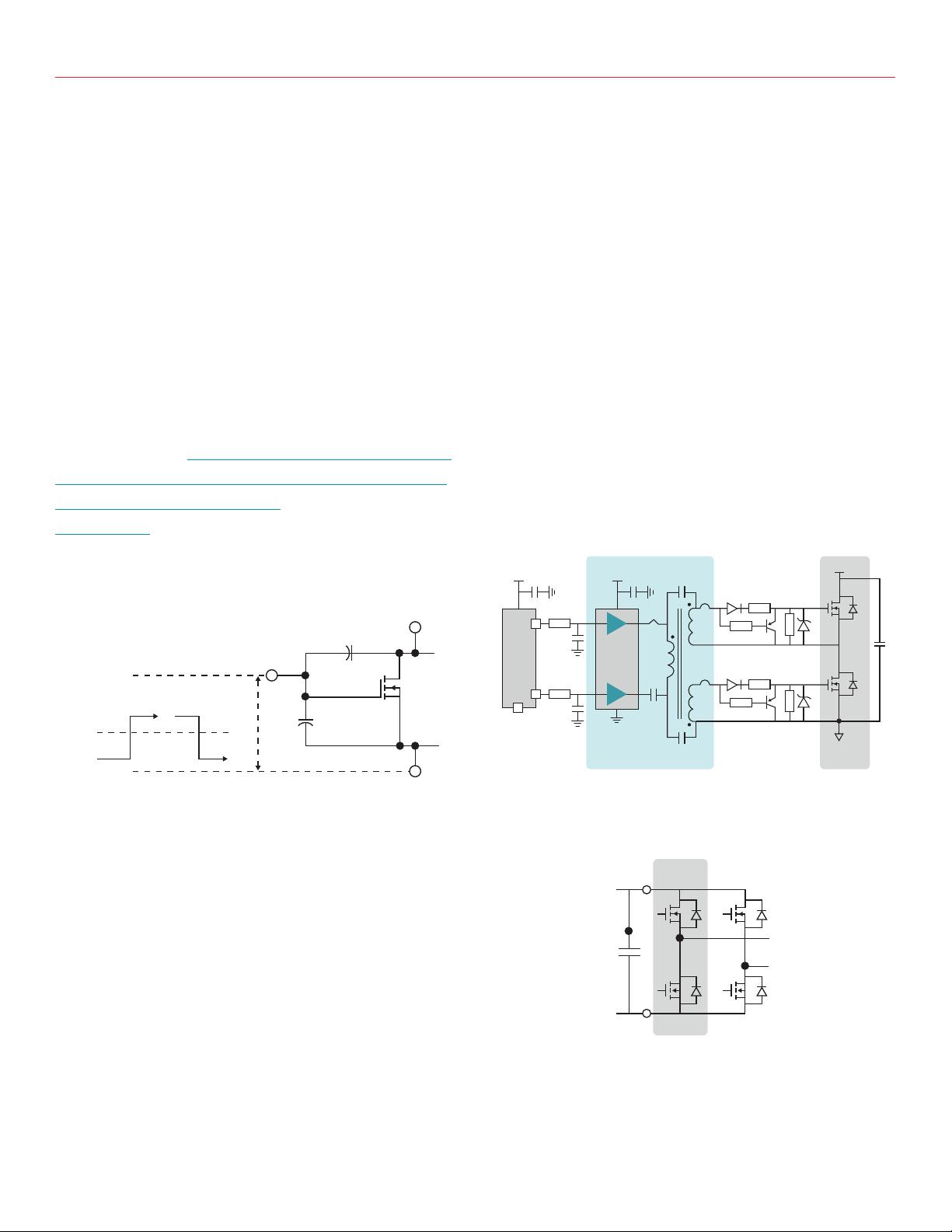
图2a显示了由简单低侧非隔离式栅极驱动器向变压器施
加脉冲到桥式拓扑相脚(图2b)的位置。这称为A型。
图2a.变压器隔离驱动相脚中的两个高侧、低侧开关.
图2b.全桥拓扑的一个相脚.
(Gate-to-source voltage) V
GS
ON ON
OFF
S
D
C
GD
C
GS
OFF
Threshold
G
V
CC
V
CC
VSS
SGND
PWM1
PWM2
Controller
Low
side
driver
C
IO
HV
Q1
C
Byp
Q2
PGND
C
IO
V
DC-Link
400 V
+
-
剩余81页未读,继续阅读
2021-04-18 上传
2020-07-26 上传
2021-05-29 上传
2020-12-06 上传
2021-09-30 上传
2010-03-23 上传
2021-08-29 上传
2021-09-29 上传
2022-01-31 上传

tracestudio
- 粉丝: 3
- 资源: 23
 我的内容管理
展开
我的内容管理
展开







最新资源
- Android圆角进度条控件的设计与应用
- mui框架实现带侧边栏的响应式布局
- Android仿知乎横线直线进度条实现教程
- SSM选课系统实现:Spring+SpringMVC+MyBatis源码剖析
- 使用JavaScript开发的流星待办事项应用
- Google Code Jam 2015竞赛回顾与Java编程实践
- Angular 2与NW.js集成:通过Webpack和Gulp构建环境详解
- OneDayTripPlanner:数字化城市旅游活动规划助手
- TinySTM 轻量级原子操作库的详细介绍与安装指南
- 模拟PHP序列化:JavaScript实现序列化与反序列化技术
- ***进销存系统全面功能介绍与开发指南
- 掌握Clojure命名空间的正确重新加载技巧
- 免费获取VMD模态分解Matlab源代码与案例数据
- BuglyEasyToUnity最新更新优化:简化Unity开发者接入流程
- Android学生俱乐部项目任务2解析与实践
- 掌握Elixir语言构建高效分布式网络爬虫
