台达PLC与伺服电机定位控制系统详解
需积分: 46 135 浏览量
更新于2024-07-17
4
收藏 593KB PDF 举报
该文档是关于台达PLC如何控制伺服电机进行简单定位的详细说明,涉及到了台达ASDA伺服驱动器的应用和相关参数设置。
在工业自动化领域,PLC(可编程逻辑控制器)与伺服电机的配合使用是实现精密定位控制的关键。台达PLC在此系统中作为控制器,通过发送脉冲信号来控制伺服电机的动作,实现原点回归、相对定位和绝对定位等操作。监控画面可以展示这些功能的运行状态。
系统中的元件包括PLC软元件和硬件设备。PLC软元件如M0至M13是用于控制逻辑的辅助继电器,例如M0作为原点回归开关,M10作为伺服启动开关,而X0至X7则为输入信号,如正转和反转极限传感器的信号,以及来自伺服的各种状态反馈。输出信号Y0至Y12则控制伺服电机的动作,如脉冲输出、旋转方向、伺服启动和异常复位等。
在实际应用中,台达ASDA伺服驱动器需要进行必要的参数设置以配合PLC的工作。例如,参数P0-02设置为2,表示伺服面板显示脉冲指令脉冲计数;P1-00设置为2,设定外部脉冲输入形式为脉冲+方向;P1-01设为0,选择位置控制模式,命令由外部端子输入。其他参数如P2-10到P2-14则分别关联到启动、清除脉冲计数、异常复位和电机运转禁止等功能,通过DI输入端子的信号状态来触发相应动作。
该系统的操作流程可能如下:当M10(伺服启动开关)闭合时,PLC开始发送脉冲给伺服驱动器,根据M0至M4等开关的状态决定是执行原点回归、正转或反转10圈、定位到坐标400000或-50000等操作。伺服驱动器接收到PLC的脉冲信号,结合自身的参数设置,控制伺服电机按照指令动作。同时,X3至X7等传感器信号会实时反馈伺服电机的状态,如启动准备、零速度检测、原点回归完成、目标位置到达及异常报警等,这些信息可以通过PLC读取并显示在监控画面上。
这份资料详细阐述了台达PLC与伺服驱动器的配合,提供了实现简单定位控制的实例,对于理解和应用此类系统具有重要参考价值。通过精确的脉冲控制和参数设置,可以确保伺服电机在各种应用场景下实现精准的运动控制。
14 应用指令简单定位设计范例
DVP-PLC 应用技术手册
14-4
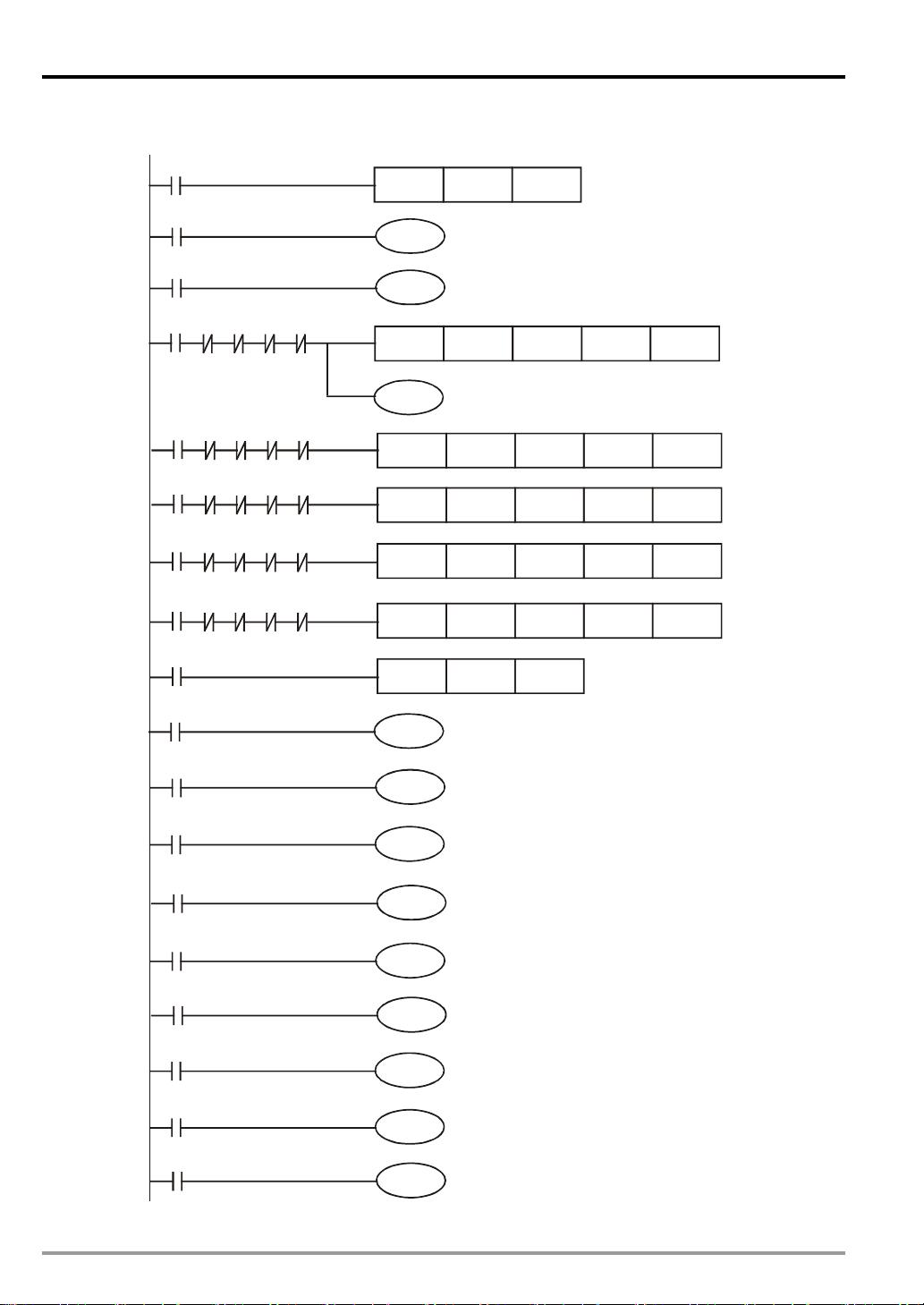
【控制程序】
M1002
MOV K200 D1343
Y7
Y10
Y11
M20
M21
M22
M23
M24
M1334
Y12
M1346
M11
X0
X1
X3
X4
X5
X6
X7
M12
M13
设置加减速时
间为
200ms
Y6
M10
伺服启动
伺服异常复位
M0
M1
M2
M3
M4
M1029
DZRN
DDRVI
DDRVI
DDRVA
DDRVA
ZRST
K10000
K100000
K-100000
K400000
K-50000
K5000
K20000
K20000
K200000
K200000
X2
Y0
Y0
Y0
Y0
Y0
Y1
Y1
Y1
Y1
M1
M0
M0
M0
M0
M2
M2
M1
M1
M1
M3
M3
M3
M2
M2
M4
M4
M4
M4
M3
M0 M4
原点回归
正转 圈
10
跑到绝对坐标
,处
400 000
跑到绝对坐标
,处
-50 000
定位完成后自动关闭定位指令执行
伺服计数寄存器清零使能
反转 圈
10
伺服电机正转禁止
伺服电机反转禁止
PLC
暂停输出脉冲
伺服紧急停止
伺服启动准备完毕
伺服启动零速度检出
伺服原点回归完成
伺服定位完成
伺服异常报警
剩余18页未读,继续阅读
132 浏览量
186 浏览量
143 浏览量
892 浏览量
437 浏览量
158 浏览量

weixin_39413522
- 粉丝: 1
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







