基于TMS320LF2407A和PBL3717A的高性能直线步进电机控制系统设计
版权申诉
92 浏览量
更新于2024-08-10
收藏 341KB PDF 举报
本文档深入探讨了"直线步进电机控制系统的设计"这一主题,由王超和翁盛隆两位作者,来自上海大学机械与电子工程学院。他们选择了美国Texas Instruments (TI)公司的数字信号处理器TMS320LF2407A和SGS公司的步进电机驱动芯片PBL3717A作为核心组件,共同构建了一种两相混合式的直线步进电机控制系统。该系统的设计目标在于提升电机控制的精度、稳定性和能效。
控制系统的关键特性体现在以下几个方面:
1. 高分辨率细分驱动:通过PBL3717A芯片,设计者实现了高达256微步的细分驱动技术,这显著提高了电机的精确度,使得在小位移应用中能够获得更高的定位精度。
2. 平稳运行与低噪声:经过精心设计,系统在运行过程中表现出极佳的稳定性,这意味着电机在连续操作时不会出现振动或者大的噪声干扰,有利于提升整体系统的用户体验。
3. 低功耗:考虑到能源效率,该控制系统着重优化了能量消耗,通过高效的驱动技术和电路设计,减少了不必要的电力损耗,有利于长期运行和节能。
4. 可靠性增强:经过实际运行验证,该控制系统表现出良好的可靠性和耐用性,能够在各种工况下保持稳定的性能,降低了因故障导致的停机时间。
5. 高性价比:综合考虑了性能和成本,所设计的系统在提供强大功能的同时,也保持了经济性,这对于寻求性价比高的用户来说是一个重要的卖点。
控制系统的整体设计包括对整步、半步、1/4步和微步运动的控制,这种灵活性使得它适用于不同应用场景,无论是需要快速移动还是精细定位的场合都能得心应手。图1展示了该控制系统的工作原理图,直观地展示了各部分之间的协同工作以及控制策略的实施。
这份研究不仅提供了实用的技术方案,还为其他工程师在设计类似的直线步进电机控制系统时提供了有价值的参考案例。通过对TMS320LF2407A和PBL3717A的巧妙结合,王超和翁盛隆的研究成果对于提升直线步进电机控制系统的性能和效率具有重要意义。
直线步进电机控制系统的设计
王 超,翁盛隆
(上海大学机 自学院,上海 200072)
DesignoftheControlSystemforLinearSteppingMotor
WANG Chao,
(Schoo1ofMechanicalandElectronicEngineeringand
WENGSheng 一long
Automation,ShanghaiUniversity,ShanghaiZOO072,China)
摘要:采用美国 Tl公 司的数字信号处理器
TMS320LF24O7A和 SGS公司的步进电机驱动芯
片PBL3717A,构成了两相混合式直线步进电机的
控制系统。运行结果表明所设计的控制系统具有细
分精度高、运行平稳且噪声小、功耗低、可靠性好及
性价比高等优点。
关键词:PBL3717A;DSP;直线步进电机;细分
驱动
中图分类号:TP271
文献标识码:A
文章编号:1001一2257(2007)06一0032一04
Abstrac t:ThisPaPerintroducedacontrolsys-
temforthehybridlinearsteppingmotorwhichwas
basedonTIcompany’sdigitalsignalprocessor
TMS320LF2407A andSGScomPany’sstePping
motordriverPBL3717A.Theoperatingresultindi-
catesthecontrolsystemthathasbeendesignedhas
the characteristics ofhigh division Precision,
smoothoPerating,lownoiseandPowerloss,great
reliabilityandthehighProPertyPricerate.
Keywords:PBL3717A;DSP;linearstepping
motor;micro一stePdriver
直线步进电机,采用高倍细分驱动技术,设计了可以
实现最多256微步的直线步进电机控制系统[2j。
1 控制系统整体设计
直线步进电机的控制系统可以实现整步、半步、
1/4 步以及微步运动,其控制原理如图 1所示。
! 细分电路 「一一.— 一-一一,
TMS320LF2407A
键盘
驱动电路
吞
直线步进 电机
直线步进电机控制系统原理
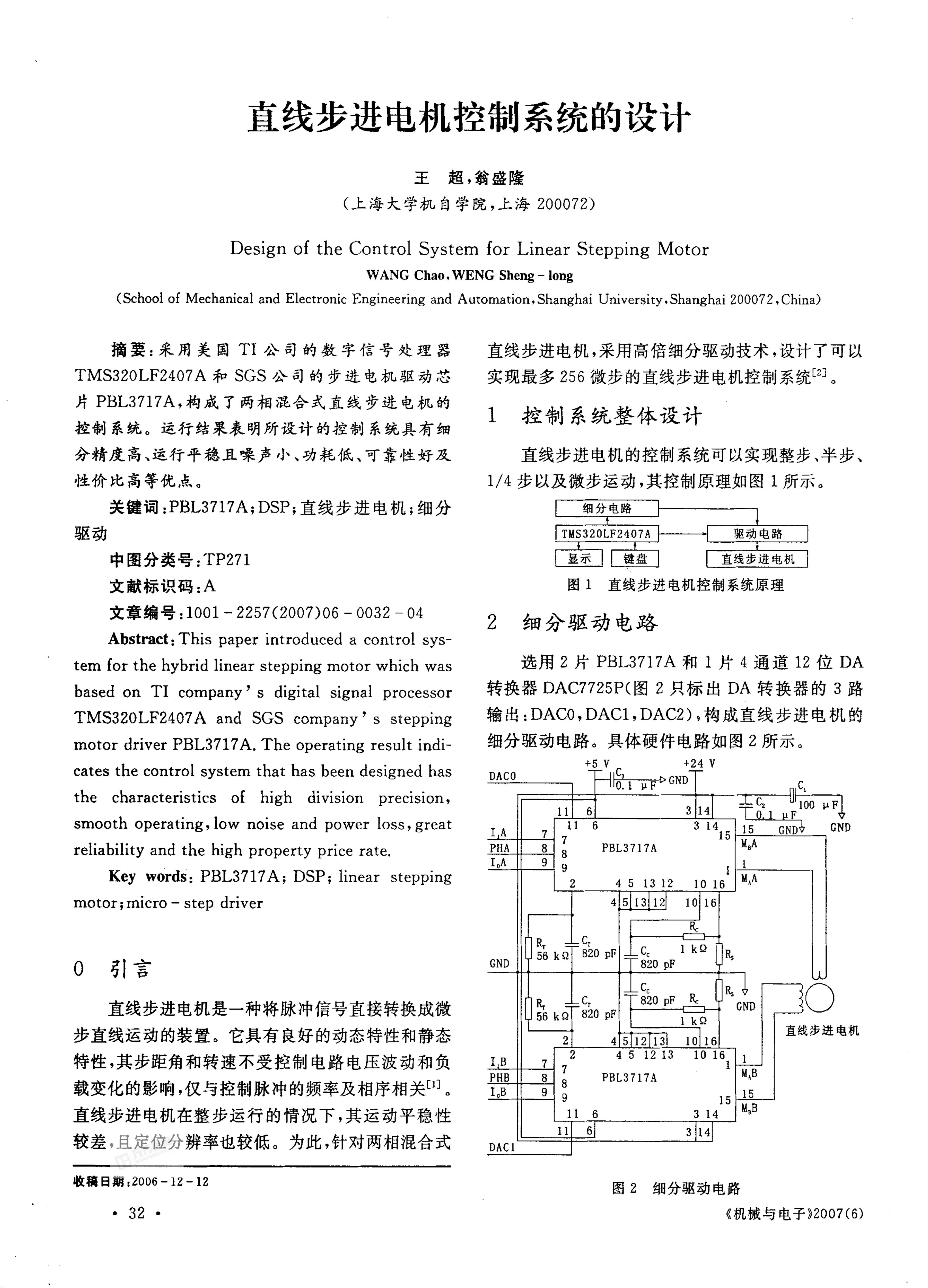
2 细分驱动电路
选用2片 PBL3717A和 1片4通道 12位 DA
转换器DAC7725P(图 2只标出DA转换器的 3路
输出:DACO,DACI,DACZ),构成直线步进电机的
细分驱动电路。具体硬件电路如图2所示。
+S V
+24 y
0 引言
直线步进电机是一种将脉冲信号直接转换成微
步直线运动的装置。它具有良好的动态特性和静态
特性,其步距角和转速不受控制电路电压波动和负
载变化的影响,仅与控制脉冲的频率及相序相关〔’〕。
直线步进电机在整步运行的情况下,其运动平稳性
较差,且定位分辨率也较低。为此,针对两相混合式
收稿 日期:2006一12一12
· 32 ·
图2 细分驱动电路
《机械与电子》2007(6)
下载后可阅读完整内容,剩余3页未读,立即下载
2021-08-07 上传
2021-07-12 上传
2021-07-12 上传
2021-07-12 上传
2021-07-13 上传
2023-06-18 上传
2021-07-12 上传
2021-06-30 上传
2021-07-12 上传

卷积神经网络
- 粉丝: 363
- 资源: 8440
 我的内容管理
展开
我的内容管理
展开







最新资源
- 构建基于Django和Stripe的SaaS应用教程
- Symfony2框架打造的RESTful问答系统icare-server
- 蓝桥杯Python试题解析与答案题库
- Go语言实现NWA到WAV文件格式转换工具
- 基于Django的医患管理系统应用
- Jenkins工作流插件开发指南:支持Workflow Python模块
- Java红酒网站项目源码解析与系统开源介绍
- Underworld Exporter资产定义文件详解
- Java版Crash Bandicoot资源库:逆向工程与源码分享
- Spring Boot Starter 自动IP计数功能实现指南
- 我的世界牛顿物理学模组深入解析
- STM32单片机工程创建详解与模板应用
- GDG堪萨斯城代码实验室:离子与火力基地示例应用
- Android Capstone项目:实现Potlatch服务器与OAuth2.0认证
- Cbit类:简化计算封装与异步任务处理
- Java8兼容的FullContact API Java客户端库介绍
