电容式MEMS惯性传感器的机电Σ-Δ调制器力反馈接口详解
需积分: 9 125 浏览量
更新于2024-07-14
收藏 5.39MB PDF 举报
本文档深入探讨了电容式微机械系统(MEMS)惯性传感器中广泛应用的机电式Sigma-Delta调制器(EM-Sigma Delta M)的力反馈接口。Sigma-Delta调制器作为一种常见的模拟信号到数字信号转换器,因其高分辨率而受到青睐。通过适当的修改,它们可以作为EM-Sigma Delta M接口,结合力反馈与模拟至数字转换的功能,同时保持相对较低的电路成本。
文章首先概述了EM-Sigma Delta M接口的基本原理和设计方法,强调了它们如何优化电容式MEMS惯性传感器的数据采集性能。接下来,作者对EM-Sigma Delta M加速度计和陀螺仪进行了分类,并详细剖析了不同架构的设计特点,包括它们在噪声抑制、线性和动态范围方面的优势与挑战。
讨论的重点在于代表性EM-Sigma Delta M惯性传感器系统的比较,这些系统可能采用了不同的技术,如电压模式、电流模式或混合模式,以适应不同的应用需求。它们在实际应用中的性能指标,如灵敏度、稳定性和功耗,以及针对工业环境的耐久性和鲁棒性,都被详细地评估和分析。
此外,文中还涵盖了EM-Sigma Delta M接口与传统模拟接口、直接数字转化器(DAC)接口之间的比较,探讨了EM-Sigma Delta M的独特优点,如在低频信号处理中的优势以及在高动态范围测量中的性能提升。
这篇综述为电容式MEMS惯性传感器的EM-Sigma Delta M力反馈接口的研究者、工程师和应用开发者提供了一个全面的参考框架,帮助他们理解和选择最适合其应用的解决方案。通过深入了解这种技术,业界能够更好地利用它来提高传感器的精度和稳定性,推动微电子技术在惯性测量领域的进步。
CHEN et al.:EM-(M) FORCE FEEDBACK INTERFACES FOR CAPACITIVE MEMS INERTIAL SENSORS: A REVIEW 6479
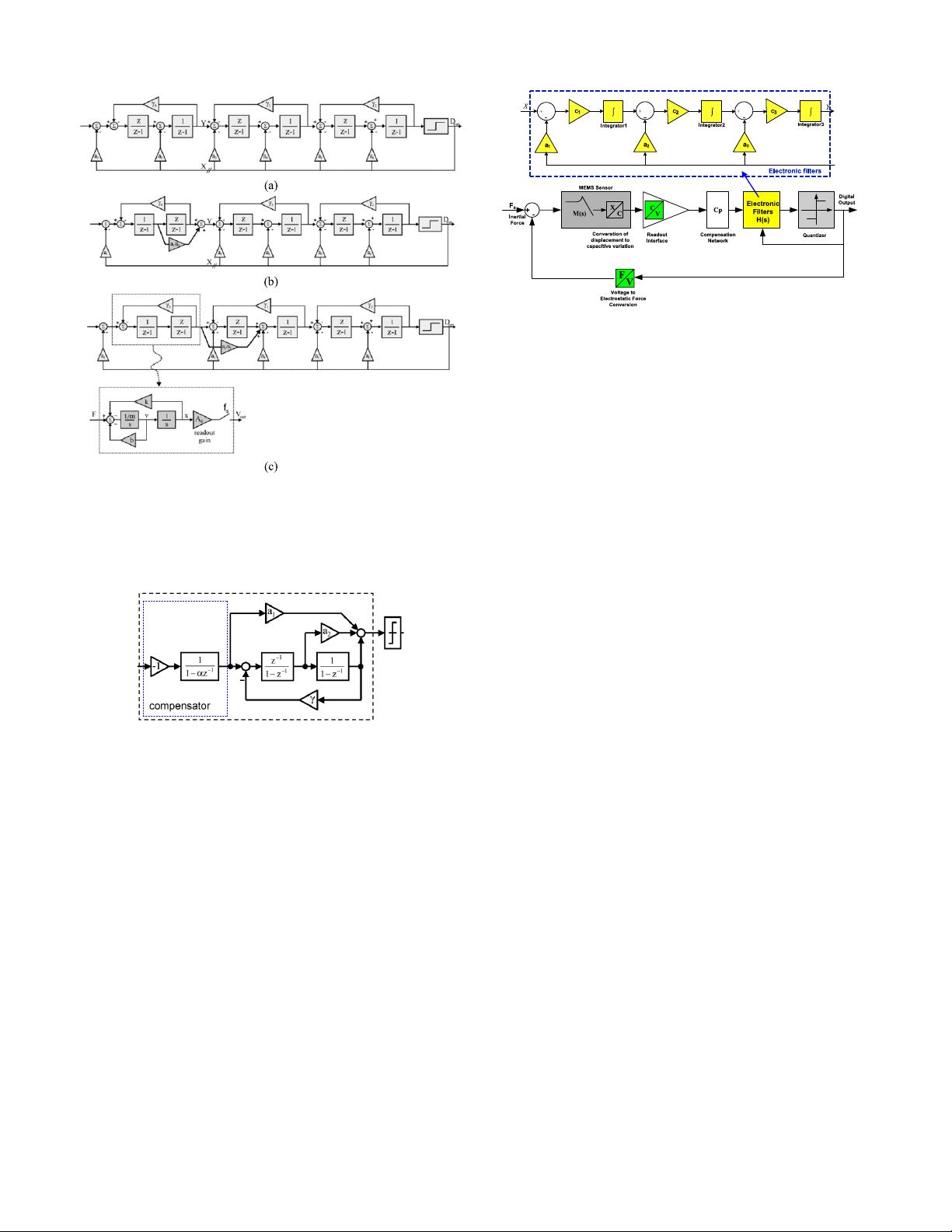
Fig. 4. Converting a purely electrical M to an unconstrained
EM-M. (a) An unconstrained electrical M structure [25]. (b) The
feedback path to the inner node of the first resonator stage can be converted
to a feedforward path. (c) The feedforward path can be shifted and replaced
by the micromechanical sensor. From [27].
Fig. 5. Positive feedback compensator in a EM- M interface described
in [28] and [29].
Thus, the first two electrical integrators can be replaced with
two mechanical integrators. The resulting structure retains the
same order as the original purely electrical M, and does
not need a compensator for loop stability.
However, the unconstrained M architecture and conven-
tional lead compensation results in stability margins that are
inadequate for high-Q (vacuum packaged) sensing elements.
This problem is due to high-order resonance modes of the
sensing element arising from the electrostatic comb fingers,
which normally are sufficiently damped at atmospheric pres-
sure, but become highly underdamped in vacuum resulting in
a phase lag approaching −360°. Ezekwe and Boser [28], [29]
used a different compensator that utilizes positive feedback
to introduce a phase lead of 180° at all frequencies, which
is sufficient to compensate the phase lag introduced by the
parasitic modes. The block diagram of the EM- M feedback
loop with positive feedback compensator is shown in Fig. 5.
Furthermore, other factors including the time delay between
the position sense and feedback pulse, the sampling
frequency f
s
and whether sensing and feedback use separate
Fig. 6. Cascaded integrators with distributed feedback architecture for a
EM-M [25].
or common electrodes influence the stability and performance
of the EM- M loop. This necessitates a tradeoff between
these design choices.
C. Single Loop Architectures
Several loop structures have been described for implement-
ing a single-loop high-order EM- M; they are trade-offs
between structure complexity and the freedom of choosing the
shape of the signal-transfer-function (STF) and the position of
the noise-transfer-function (NTF) zeros [30]. The most com-
monly used structure is the cascaded integrator with distributed
feedback (CIDF) architecture, as depicted in Fig. 6. It contains
a cascade of several delaying integrators with feedback signals
that are scaled by coefficients a
i
(i = 1, 2 ...)andfedto
each integrator. The distributed feedback architecture bypasses
the mechanical sensing element and therefore contributes
compensating zeros, whose values depend on the feedback
coefficients as well as the parameters of the sensing element.
Furthermore, the feedback voltage of this topology cannot be
adjusted without tuning the values of the coefficients a
i
[30].
Dong [25] analysed the total in-band noise of a typical CIDF
architecture, which is mainly determined by the quantization
noise at the upper end of the signal band. It thus limits the
maximum obtainable signal bandwidth and it is desirable to
further reduce the total in-band quantization noise power.
A single loop high-order EM- M can be constructed by
using several local feedback paths in the loop filter to shape
the quantization noise at the end of the signal band [31].
Fig. 7 (a) and (b) show the architecture of an electronic filter
with feed-forward with local resonators (FFLR) [32], [33], and
distributed feedback loops with local resonators (DFLR) [34],
respectively. The local feedback path g
i
(i = 1, 2 ...) will
create a local resonator, which produces notches to cause fast
decay of the signal magnitude in the stop-band and thus further
suppresses the quantization noise. The architecture in Fig. 7(a)
does not contain signal paths bypassing the sensing element
since it is in series with the filter and the quantizer. The
feedback range is easily adjusted by varying the magnitude
of the feedback pulses.
Normally, a single loop architecture has a low susceptibility
to analog component mismatch [35]. In addition, the quanti-
zation noise is randomized by the high-order loop; therefore,
limit cycle tones are less likely to occur [25].
剩余19页未读,继续阅读
604 浏览量
2024-05-27 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

weixin_38736018
- 粉丝: 8
 我的内容管理
展开
我的内容管理
展开







最新资源
- 网页自动刷新工具 v1.1 - 自定义时间间隔与关机
- pt-1.4协程源码深度解析
- EP4CE6E22C8芯片三相正弦波发生器设计与实现
- 高效处理超大XML文件的查看工具介绍
- 64K极限挑战:国际程序设计大赛优秀3D作品展
- ENVI软件全面应用教程指南
- 学生档案管理系统设计与开发
- 网络伪书:社区驱动的在线音乐制图平台
- Lettuce 5.0.3中文API文档完整包下载指南
- 雅虎通Yahoo! Messenger v0.8.115即时聊天功能详解
- 将Android手机转变为IP监控摄像机
- PLSQL入门教程:变量声明与程序交互
- 掌握.NET三层架构:实例学习与源码解析
- WPF中Devexpress GridControl分组功能实例分析
- H3Viewer: VS2010专用高效帮助文档查看工具
- STM32CubeMX LED与按键初始化及外部中断处理教程
