
3152 IEEE TRANSACTIONS ON NEURAL NETWORKS AND LEARNING SYSTE MS, VOL. 30, NO. 10, OCTOBER 2019
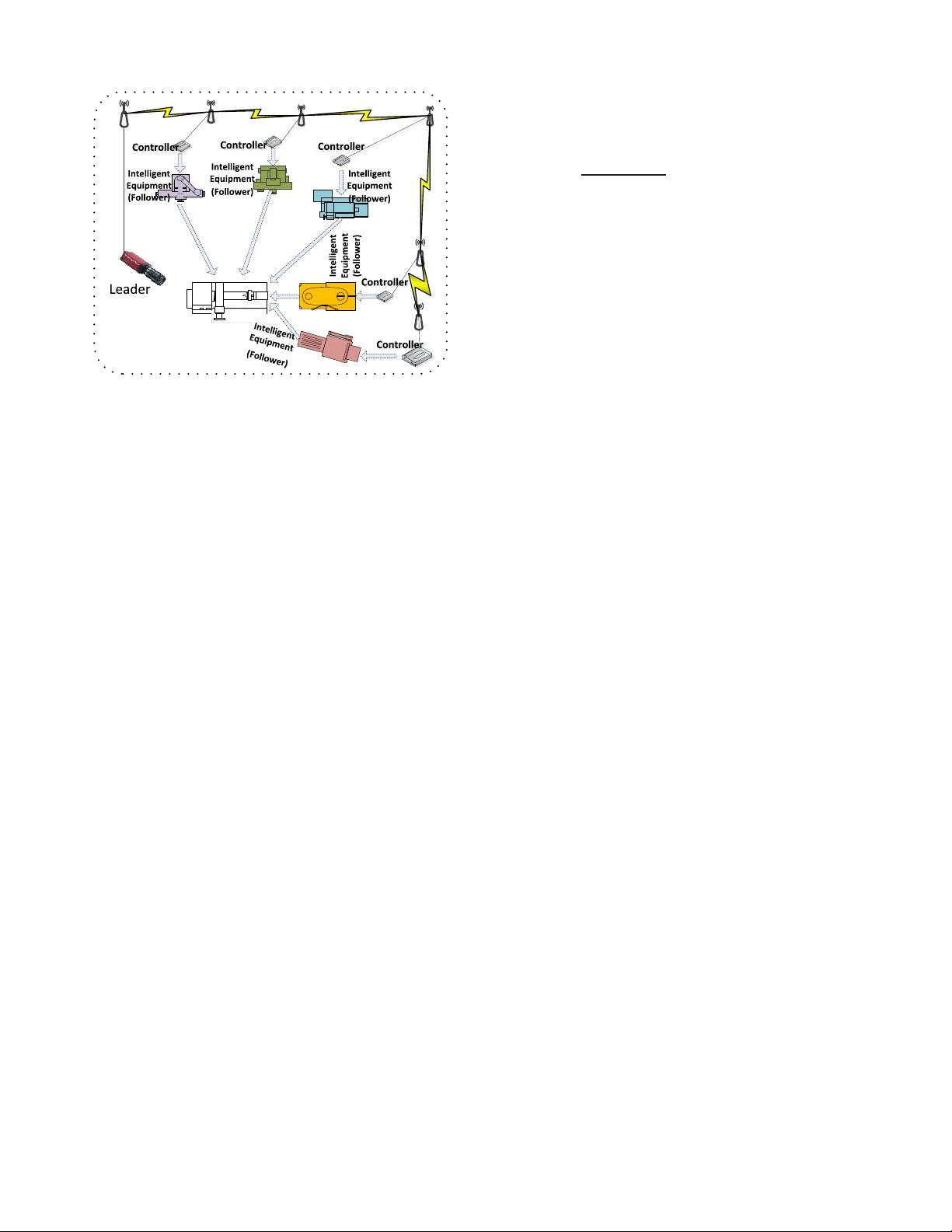
Fig. 1. Intelligent equipments in industrial applications.
of network resources. An illustration for the network systems
is demonstrated in Fig. 1
The considered network systems contains N heterogeneous
nodes, in which the dynamics for i th (i = 1, 2,...,N) node
is given as
˙x
i
(t) = A
i
x
i
(t) + B
i
u
i
(t)
y
i
(t) = C
i
x
i
(t) (1)
where x
i
(t) ∈ R
n
i
denotes the state, u
i
(t) ∈ R denotes the
control input, and y
i
(t) ∈ R denotes the output. System
matrices A
i
∈ R
n
i
×n
i
, B
i
∈ R
n
i
×1
and C
i
∈ R
1×n
i
are
constant known matrices.
The target trajectory is the output of an autonomous linear
system (leader 0), whose dynamics is described by
˙x
0
(t) = A
0
x
0
(t)
y
0
(t) = C
0
x
0
(t) (2)
where x
0
(t) ∈ R
n
0
denotes the state and y
0
(t) ∈ R denotes
the output. System matrices A
0
∈ R
n
0
×n
0
and C
0
∈ R
1×n
0
are
constant known matrices.
The objective of this paper is that designing a distrib-
uted control law to guarantee the output synchronization of
node i,(i = 1, 2,...,N) and leader 0.
In the p rocess of this paper, we adopt the following defini-
tion, assumptions and lemmas for the network systems.
Definition 1: The network systems and the leader 0 achieve
output synchronization if y
i
(t) → y
0
(t) as t →∞,i.e.,
lim
t→∞
y
i
(t) − y
0
(t)=0. (3)
Assumption 1: The system matrices (A
i
, B
i
) in (1 ) is sta-
bilizable and (A
i
, C
i
) is detectable.
Assumption 2: The system matrices (A
0
, C
0
) in (2) is
observable, and all real parts for the eigenvalues of A
0
equal
to zero.
Assumption 3: The communication digraph
¯
G(t) is a
time-varying d irected digraph; the elements a
ij
(t) for A(t)
and d
i
(t) for D(t) are continuous on t with upper bounds.
Lemma 1: If the communication graph G(t) satisfies
1
T
L(t) = L(t)1 = 0 and the induced digraph
¯
G(t) is weakly
connected, then the following inequ ality:
λ
min
¯
L(t) +
¯
L(t)
T
2
≥ μ ∀
¯
L(t) ∈ (t) (4)
holds, where μ>0,
¯
L(t) = L(t) + D(t) and the set
(t) ={L(t)+D(t)| digraph G(t) is balanced and the induced
digraph
¯
G(t) is weakly connected }.
Lemma 2: (Small-Gain Theorem (SGT)) Suppose the sys-
tem G and the operator are input–output stable, then
the feedback interconnection (G,) is well defined and
input–output stable if G < 1.
IV. C
ONTROLLER DESIGN
Since the dynamics of nodes in network systems are non-
identical and the purpose to ensure the security of network,
the designed distributed c ontroller for each node contains RG
and regulator. Instead of exchanging information by them-
selves, nodes adopt RGs to operate information exchange
though communication channels. This structure can guaran-
tee the security of node since its information has not been
transmitted. Under the action of distributed control law, all
RGs achieve synchronization with the leader. Then, the leader
and the RGs are treated as the exosystem of each node, and
the regulator is utilized to force the node tracks its exosystem.
The distributed controller for node i is designed as
˙r
i
= A
0
r
i
+ Mv
i
˙
ξ
i
= ξ
i
− Hge
i
u
i
= ξ
i
− ge
i
(5)
which contains the RG
˙r
i
= A
0
r
i
+ Mv
i
η
i
= C
0
r
i
(6)
and the regulator
˙
ξ
i
= ξ
i
− Hge
i
u
i
= ξ
i
− ge
i
(7)
where r
i
(t) ∈ R
n
0
, η
i
(t) ∈ R, v
i
(t) ∈ R
p×1
, M ∈ R
n
0
×p
,
ξ(t) ∈ R
n
0
, ∈ R
1×n
0
. The designed RG (6) can copy
the dynamics of the leader (2). The matrix M is chosen
for synchronization purpose and the distributed control law
v
i
(t) depends on the relative information of RGs and is
designed as
v
i
=
j ∈N
i
a
ij
(t)(η
j
− η
i
) + d
i
(t)(y
0
− η
i
). (8)
The designed regulator (7) can force the nonidentical node
tracks its exosystem and contains internal model
˙
ξ
i
= ξ
i
+ H ˜u
i
u
i
= ξ
i
+˜u
i
(9)
and stabilizer
˜u
i
=−ge
i
(10)
剩余10页未读,继续阅读

weixin_38722588
- 粉丝: 6
- 资源: 839
 我的内容管理
展开
我的内容管理
展开







最新资源
- 多功能HTML网站模板:手机电脑适配与前端源码
- echarts实战:构建多组与堆叠条形图可视化模板
- openEuler 22.03 LTS专用openssh rpm包安装指南
- H992响应式前端网页模板源码包
- Golang标准库深度解析与实践方案
- C语言版本gRPC框架支持多语言开发教程
- H397响应式前端网站模板源码下载
- 资产配置方案:优化资源与风险管理的关键计划
- PHP宾馆管理系统(毕设)完整项目源码下载
- 中小企业电子发票应用与管理解决方案
- 多设备自适应网页源码模板下载
- 移动端H5模板源码,自适应响应式网页设计
- 探索轻量级可定制软件框架及其Http服务器特性
- Python网站爬虫代码资源压缩包
- iOS App唯一标识符获取方案的策略与实施
- 百度地图SDK2.7开发的找厕所应用源代码分享
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


