
IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS
3
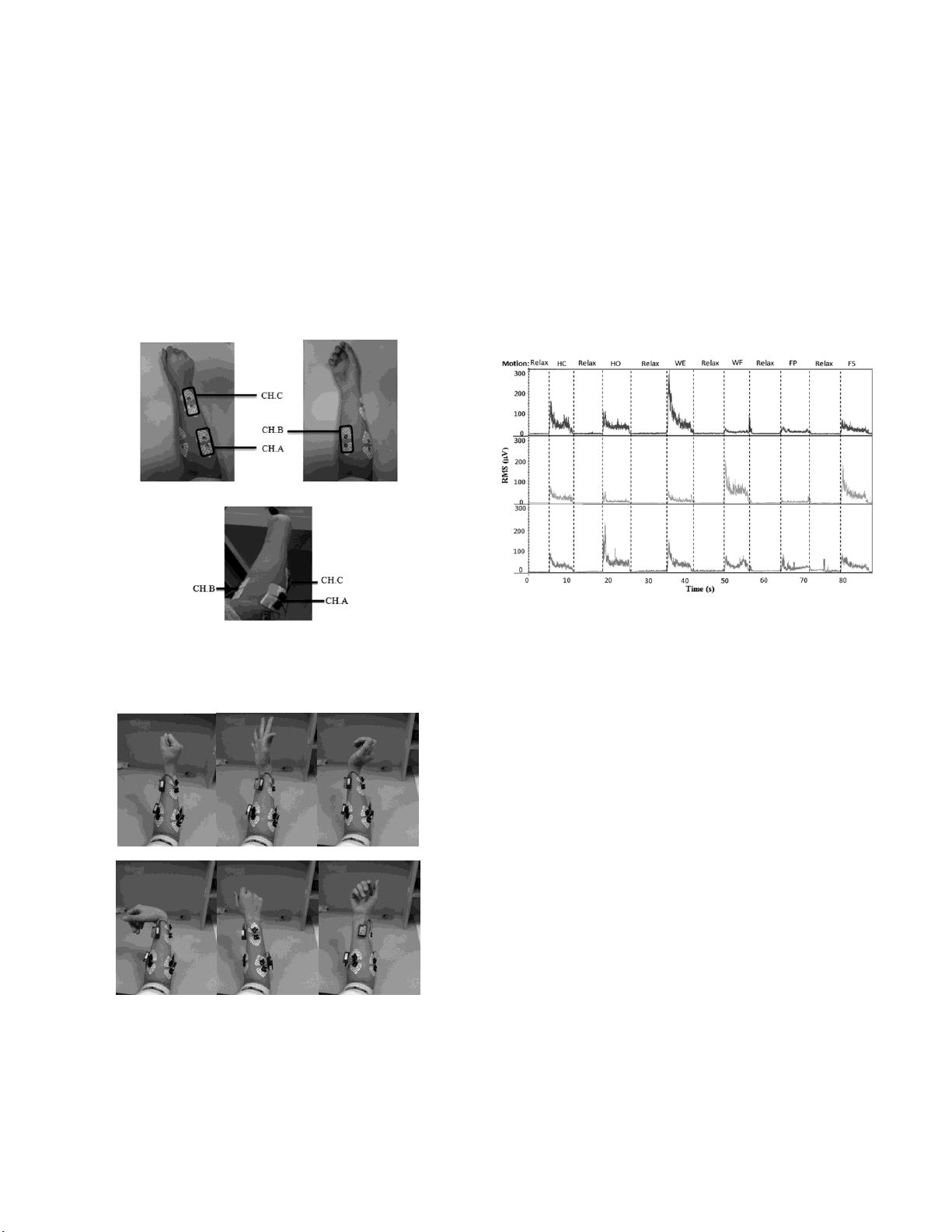
digitorum (CH.C) of the subject’s forearm, respectively (refer to
Fig. 1).
The acquired sEMG signal is the superimposition of EMG
signals from the muscles below and around the sEMG sensor.
The extensor carpi radialis longus is in the upper level of the
supinator, and the flexor carpi radialis is near the pronator teres.
Moreover, supinator and pronator teres serve to forearm
supination and forearm pronation, respectively. Consequently,
we can choose forearm pronation and forearm supination as two
additional hand motions without increasing the number of
sEMG sensors. Totally, six hand motions can be classified by
three sEMG sensors, namely hand closing, hand opening, wrist
extension, wrist flexion, forearm pronation, and forearm
supination (as shown in Fig. 2).
In order to classify more hand motions with fewer sEMG
sensors, the sensor position is crucial to the identification
accuracy. Therefore, we calculated RMS of sEMG signals
acquired from CH. A to CH. C. As illustrated in Fig. 3, the
calculated RMS values of sEMG signals detected from CH. A,
CH. B, and CH. C are listed from top to bottom in turn. The
identified hand motions, such as hand closing, hand opening,
wrist extension, wrist flexion, forearm pronation, and forearm
supination are listed from left to right. Each hand motion
continues about 5 s, and the interval between two adjacent hand
motions is about 10 s. According to Fig. 3, when the subject
executes different hand motions, the RMS values of three
sensors are different. For example, when the hand opening is
executed, the RMS value of CH. C is the largest among three
sensors. In the case of wrist extension, the RMS value of CH. A
changes greatly. While in the case of wrist flexion, the RMS
value of CH. B is more than that of the other two sensors.
According to the obvious changes of RMS values, it can be
concluded that the determined sensor positions contribute to the
identification of the selected six hand motions.
To reduce the influence of skin (e.g., impedance, superficial
oil content, and dead cell layer), we wiped the skin of desired
locations on the forearm with alcohol. Moreover, two channels
of differential surface Ag-AgCl electrodes with 20 mm
inter-electrode distance were utilized to collect sEMG signals
after the skin dried. The sEMG signals were recorded with a
sampled rate of 1,500 Hz using TeleMyob2400 G2 (Noraxon,
USA).
Six healthy subjects participated in the experiment, namely
four women who were 23, 23, 25 and 26 years old, and two men
who were 23 and 36 years old, respectively. Some rehabilitation
experts have suggested that one should use healthy subjects for
initial evaluation objectives [14, 40]. Thereby, the sEMG of
healthy subjects is an appropriate emulation of the amputee’s
sEMG. To further demonstrate the practicability and the
validity of the proposed identification method, two amputees
were required to execute the same experiment (refer to Fig. 1).
All of the subjects performed above six hand movements. For
each subject, we selected 100 sEMG signals of one hand
movement. Since there are six hand movements that need to be
classified, a total of 600 sEMG signals were collected for each
subject. In order to control the prosthetic hand in real time, the
response time should be less than 300 ms. Therefore, 200 ms
was selected as the appropriate time window length of the
sEMG signal [13]. There are 300 points for one signal. Since
sEMG signals are different from one subject to another, we
divided the acquired sEMG signals into two sets for each
subject. One is the training set, the other is the test set, and each
set has 300 sEMG signals.
(a)
(b)
Fig. 1. The position of sEMG sensors. Channel A is placed on the extensor
carpi radialis longus; Channel B is placed on the flexor carpi radialis; and
Channel C is placed on the extensor digitorum. (a) the position of sEMG
sensors of a healthy subject; (b) the position of sEMG sensors of an amputee.
(a) (b) (c)
(d) (e) (f)
Fig. 2. Six classes of hand movements utilized in this paper. (a) hand closing
(HC); (b) hand opening (HO); (c) wrist extension (WE); (d) wrist flexion
(WF); (e) forearm pronation (FP); (f) forearm supination (FS).
Fig. 3. The RMS values of sEMG signals from three sensors.
剩余11页未读,继续阅读

weixin_38661852
- 粉丝: 5
- 资源: 978
 我的内容管理
展开
我的内容管理
展开







最新资源
- 高效办公必备:可易文件夹批量生成器
- 吉林大学图形学与人机交互课程作业解析
- 8086与8255打造简易乒乓球游戏机教程
- Win10下C++开发工具包:Bongo Cat Mver、GLEW、GLFW
- Bootstrap前端开发:六页果蔬展示页面
- MacOS兼容版VSCode 1.85.1:最后支持10.13.x版本
- 掌握cpp2uml工具及其使用方法指南
- C51单片机星形流水灯设计与Proteus仿真教程
- 深度远程启动管理器使用教程与工具包
- SAAS云建站平台,一台服务器支持数万独立网站
- Java开发的博客API系统:完整功能与接口文档
- 掌握SecureCRT:打造高效SSH超级终端
- JAVA飞机大战游戏实现与源码分享
- SSM框架开发的在线考试系统设计与实现
- MEMS捷联惯导解算与MATLAB仿真指南
- Java实现的学生考试系统开发实战教程
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


