立体视觉匹配算法分类与评估
需积分: 0 102 浏览量
更新于2024-07-18
1
收藏 4.11MB PDF 举报
"这篇文章是《国际计算机视觉杂志》(International Journal of Computer Vision)第47期1/2/3部分的一篇综述论文,作者Daniel Scharstein和Richard Szeliski深入探讨了密集两帧立体匹配算法的分类与评估。文章旨在为计算机视觉领域的初学者提供一个快速入门立体视觉匹配的途径,同时也对已有的立体匹配方法进行了分析和实验对比,以评估它们的性能。"
在计算机视觉领域,立体匹配是一项核心研究内容,它涉及通过两个不同视角的图像(通常被称为左视图和右视图)来计算三维场景中的对应像素点。这篇文章首先提出了一种立体匹配方法的分类体系,该体系旨在分析和比较个体立体算法的各种组件和设计决策。这种分类体系包括了算法的关键特征,如成本函数、匹配策略、优化方法以及后处理技术等。
作者详细介绍了各种匹配算法的原理,如基于局部特征的匹配、全局优化方法、半全局匹配(SGM)以及基于深度学习的现代方法。对于每种方法,他们讨论了其优缺点,以及在实际应用中可能遇到的问题,例如视差不连续性、光照变化和噪声影响等。
此外,Scharstein和Szeliski还进行了一系列实验,使用了多种数据集来评估不同立体匹配算法的性能。这些实验结果为选择合适的匹配算法提供了依据,并揭示了各种因素如何影响算法的精度和速度。为了促进进一步的研究和比较,他们创建了一个共享软件平台和标准数据集,这使得研究人员可以更方便地评估和比较新的立体匹配算法。
这篇论文不仅是立体视觉初学者的宝贵教程,也是研究者们深入理解现有方法、改进算法和开发新方法的重要参考。通过提供一个结构化的框架来理解和评估立体匹配算法,它为这个领域的发展奠定了坚实的基础。
A Taxonomy and Evaluation of Dense Two-Frame Stereo Correspondence Algorithms 13
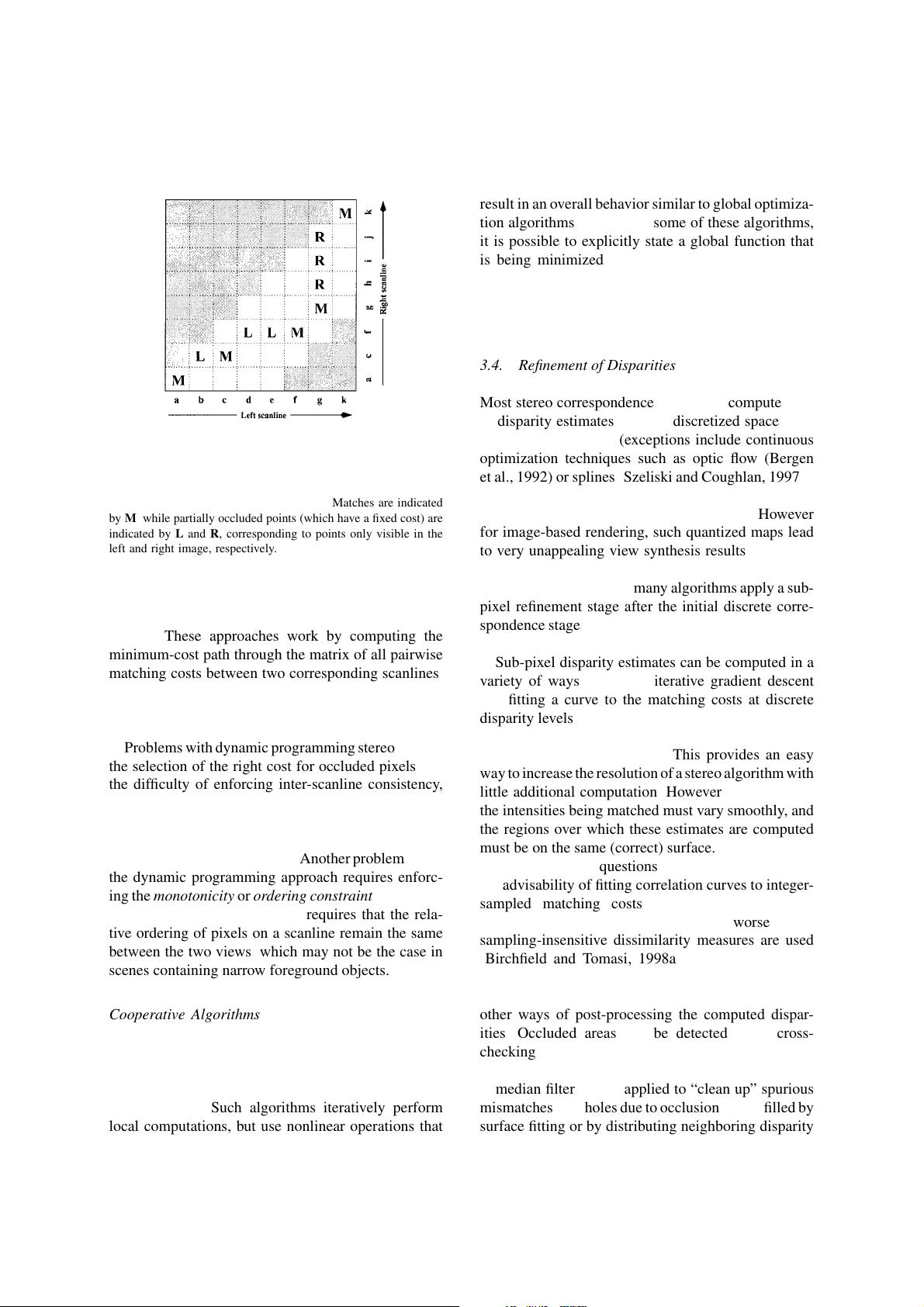
Figure 2. Stereo matching using dynamic programming. For each
pair of corresponding scanlines, a minimizing path through the ma-
trix of all pairwise matching costs is selected. Lowercase letters (a–k)
symbolize the intensities along each scanline. Uppercase letters rep-
resent the selected path through the matrix. Matches are indicated
by M, while partially occluded points (which have a fixed cost) are
indicated by L and R, corresponding to points only visible in the
left and right image, respectively. Usually, only a limited disparity
range is considered, which is 0–4 in the figure (indicated by the non-
shaded squares). Note that this diagram shows an “unskewed” x-d
slice through the DSI.
1998b). These approaches work by computing the
minimum-cost path through the matrix of all pairwise
matching costs between two corresponding scanlines.
Partial occlusion is handled explicitly by assigning a
group of pixels in one image to a single pixel in the
other image. Figure 2 shows one such example.
Problems with dynamic programming stereo include
the selection of the right cost for occluded pixels and
the difficulty of enforcing inter-scanline consistency,
although several methods propose ways of address-
ing the latter (Ohta and Kanade, 1985; Belhumeur,
1996; Cox et al., 1996; Bobick and Intille, 1999;
Birchfield and Tomasi, 1998b). Another problem is that
the dynamic programming approach requires enforc-
ing the monotonicity or ordering constraint (Yuille and
Poggio, 1984). This constraint requires that the rela-
tive ordering of pixels on a scanline remain the same
between the two views, which may not be the case in
scenes containing narrow foreground objects.
Cooperative Algorithms. Finally, cooperative algo-
rithms, inspired by computational models of human
stereo vision, were among the earliest methods pro-
posed for disparity computation (Dev, 1974; Marr
and Poggio, 1976; Marroquin, 1983; Szeliski and
Hinton, 1985). Such algorithms iteratively perform
local computations, but use nonlinear operations that
result in an overall behavior similar to global optimiza-
tion algorithms. In fact, for some of these algorithms,
it is possible to explicitly state a global function that
is being minimized (Scharstein and Szeliski, 1998).
Recently, a promising variant of Marr and Poggio’s
original cooperative algorithm has been developed
(Zitnick and Kanade, 2000).
3.4. Refinement of Disparities
Most stereo correspondence algorithms compute a set
of disparity estimates in some discretized space, e.g.,
for integer disparities (exceptions include continuous
optimization techniques such as optic flow (Bergen
et al., 1992) or splines (Szeliski and Coughlan, 1997)).
For applications such as robot navigation or people
tracking, these may be perfectly adequate. However
for image-based rendering, such quantized maps lead
to very unappealing view synthesis results (the scene
appears to be made up of many thin shearing layers).
To remedy this situation, many algorithms apply a sub-
pixel refinement stage after the initial discrete corre-
spondence stage. (An alternative is to simply start with
more discrete disparity levels.)
Sub-pixel disparity estimates can be computed in a
variety of ways, including iterative gradient descent
and fitting a curve to the matching costs at discrete
disparity levels (Ryan et al., 1980; Lucas and Kanade,
1981; Tian and Huhns, 1986; Matthies et al., 1989;
Kanade and Okutomi, 1994). This provides an easy
way to increase the resolution of a stereo algorithm with
little additional computation. However, to work well,
the intensities being matched must vary smoothly, and
the regions over which these estimates are computed
must be on the same (correct) surface.
Recently, some questions have been raised about
the advisability of fitting correlation curves to integer-
sampled matching costs (Shimizu and Okutomi,
2001). This situation may even be worse when
sampling-insensitive dissimilarity measures are used
(Birchfield and Tomasi, 1998a). We investigate this
issue in Section 6.4 below.
Besides sub-pixel computations, there are of course
other ways of post-processing the computed dispar-
ities. Occluded areas can be detected using cross-
checking (comparing left-to-right and right-to-left dis-
parity maps) (Cochran and Medioni, 1992; Fua, 1993).
A median filter can be applied to “clean up” spurious
mismatches, and holes due to occlusion can be filled by
surface fitting or by distributing neighboring disparity
大多数立体匹配算法计算视差时都是离散的,视图合成效果不好
用亚像素视差
估计来改善这个
问题
亚像素视差估计
计算视差后处理
的其他方法
剩余35页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-03-01 上传
2021-09-06 上传
2019-01-09 上传
2021-09-28 上传
2021-09-29 上传
2016-03-18 上传

交大雨声
- 粉丝: 0
- 资源: 10
 我的内容管理
展开
我的内容管理
展开







最新资源
- all-the-streets:生成美国所有街道的地图
- hello-tailwindcss:[WIP]学习顺风
- brickpi3
- 2.4G无线鼠标PCB,PADS9.5打开-电路方案
- Teleport:进化的吉西见面会
- EvanSkiStudios.github.io:主题曲
- WordPress主题:Ofiz v1.5业务咨询主题2022年最新版.zip
- bundler.js:组件的打包器和打包指南
- buxfer-api-client:用于访问buxfer.com http API的Java客户端
- overtones:用于音乐理论和复音泛音演唱作曲者的泛音的可视化
- HuGo-开源
- 智能家居,IoT (物联网)恒温器解决方案(3D模型+代码+电路等)-电路方案
- WebFamily:【web面试+ web学习指南】涵盖大部分Web前端开发程序员所需要掌握的核心知识
- jquery.ellipsis:jQuery 的省略号插件 (MIT)
- react-measure:ute计算React组件的度量
- arduino-fan-pwm:结合了其他Arduino草图,以及额外的工作。 寻求更好的风扇pwm控制,适用于arduino uno atmega328p
