基于80C51单片机的智能小车设计:语音控制与障碍避障
需积分: 5 96 浏览量
更新于2024-07-01
收藏 2.18MB DOC 举报
本研究文档详细探讨了一项基于80C51单片机的智能小车设计与制作项目。课题的核心目标是设计一款具备语音控制、直线前进与倒退以及障碍物避免功能的智能小车。单片机作为控制核心,体现了现代信息技术与机械工程的融合,尤其是在当前传感器技术和自动控制技术日益发展的背景下。
方案论证部分着重于关键组件的选择和设计。首先,控制核心选择80C51单片机,因其具有较高的处理能力和可靠性。小车的驱动方式采用直流电机,通过直流电机驱动模块来实现动力传输。选择直流电机是因为它们效率高、响应快,适合小车的动力需求。障碍检测模块则引入了光电传感器和超声波传感器,利用这些传感器来感知周围环境,确保小车在行驶过程中能够避开障碍物。
在硬件设计方面,详细地描述了车体结构、驱动电路、电机电路设计,包括通道控制、电机调速以及驱动模块的集成。红外线传感器的选用和安装位置对防止小车碰撞至关重要。整个硬件制作过程包含了选材、采购、电路设计与制作,以及传感器和电路的精确安装。
软件设计同样重要,主要包括主程序设计,负责协调和管理各个模块的工作;障碍检测模块程序用于实时处理传感器数据,做出避障决策;语音播放程序则实现了与用户的交互,增强用户体验。整个设计过程还涉及程序的调试,确保软件与硬件的无缝集成。
使用说明部分提供了操作指南,让读者了解如何正确使用和维护这款智能小车。总结与展望部分回顾了项目的主要成就,同时展望了未来可能的改进和扩展,如更高级的传感器技术、更复杂的算法等。
此外,文档还引用了相关参考文献,支持研究的理论依据和技术创新,并在附录中提供了详细的设计图纸和技术参数,便于其他研究者或爱好者参考和学习。
该文档深入探讨了智能小车的设计方法,展示了单片机技术在其中的关键作用,以及如何通过硬件和软件的协同工作实现车辆的智能化。这对于了解和开发智能设备,尤其是结合传感器技术的移动机器人,具有很高的实用价值。
5 / 30
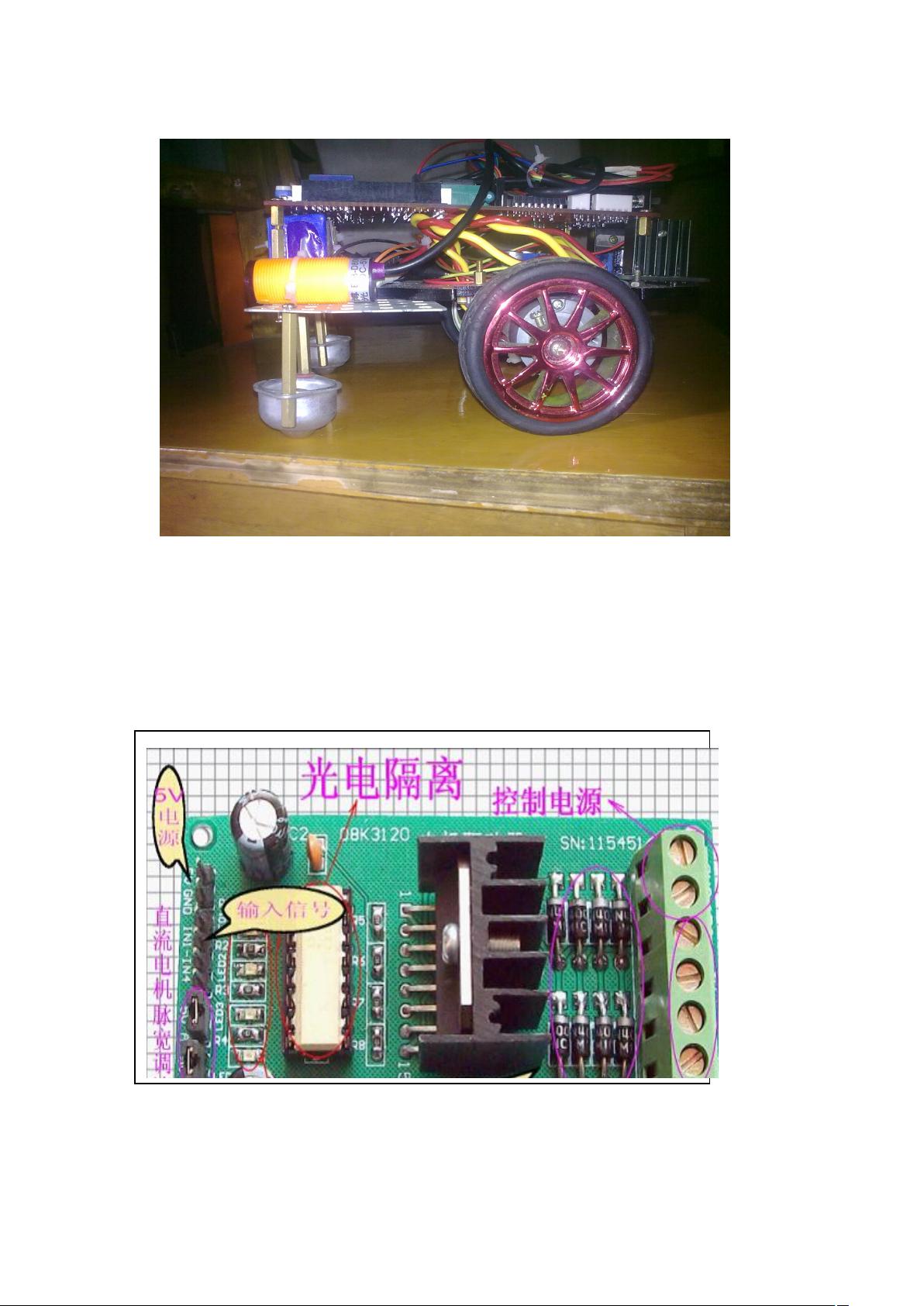
图 2.2 驱动方式实物图
2.3 直流电机驱动模块
L298N 是 ST 公司生产的一种高电压、大电流电机驱动芯片。该芯片可以驱动一台两
相步进电机或四相步进电机,也可以驱动两台直流电机。
图 2.3 L298 驱动模块实物图
剩余29页未读,继续阅读
2023-05-04 上传
2023-02-27 上传
2023-04-01 上传
2023-12-03 上传
2023-07-05 上传
2023-06-11 上传
2023-05-31 上传
2023-05-03 上传

智慧安全方案
- 粉丝: 3789
- 资源: 59万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- WPF渲染层字符绘制原理探究及源代码解析
- 海康精简版监控软件:iVMS4200Lite版发布
- 自动化脚本在lspci-TV的应用介绍
- Chrome 81版本稳定版及匹配的chromedriver下载
- 深入解析Python推荐引擎与自然语言处理
- MATLAB数学建模算法程序包及案例数据
- Springboot人力资源管理系统:设计与功能
- STM32F4系列微控制器开发全面参考指南
- Python实现人脸识别的机器学习流程
- 基于STM32F103C8T6的HLW8032电量采集与解析方案
- Node.js高效MySQL驱动程序:mysqljs/mysql特性和配置
- 基于Python和大数据技术的电影推荐系统设计与实现
- 为ripro主题添加Live2D看板娘的后端资源教程
- 2022版PowerToys Everything插件升级,稳定运行无报错
- Map简易斗地主游戏实现方法介绍
- SJTU ICS Lab6 实验报告解析
