服务机械手设计:SCARA型装配机械臂
版权申诉
172 浏览量
更新于2024-06-23
收藏 815KB DOC 举报
“服务机器人手臂关节结构设计说明书详细介绍了机械手的设计原理和应用,特别是SCARA(Selective Compliance Assembly Robot Arm,选择性顺应装配机器人臂)型机械手在装配作业中的广泛应用。文章旨在设计一种用于电子元器件装配的小型服务装配机械手,强调结构设计的简易性、可靠性、经济性和教学实用性。”
在机械手设计领域,服务机器人手臂关节结构的设计至关重要,因为它直接影响到机器人的灵活性、精度和工作效率。SCARA机械手因其独特的结构特性,能够在平面内实现快速、精确的运动,尤其适用于电子元器件等精密装配任务。这种机械手由机身、大臂、小臂和手腕组成,每个部分都具有一定的自由度,使得机械手能够完成复杂的工作任务。
本设计中,SCARA机器人的传动系统采用了谐波减速器、齿轮和丝杠螺母等组件,这些元件的选择确保了传动的高效性和稳定性。谐波减速器以其高精度和紧凑的结构被广泛应用于机器人关节;齿轮则可以传递动力并改变转速和扭矩;丝杠螺母传动则能将旋转运动转化为直线运动,提供精准的位置控制。
步进电机作为驱动单元,因其控制简便、成本较低而被选中。步进电机可以实现精确的定位和速度控制,适合于需要微步进操作的场合,如电子元器件装配。其工作原理是通过接收脉冲信号来控制电机的转动角度,从而实现精确的位移。
此外,设计过程中,通过对国内外同类产品的分析比较,选择了最优设计方案,确保了设计出的机械手不仅结构简单,而且运行可靠,经济合理。这样的设计不仅能满足实际装配需求,还具有教学实验的价值,有助于学生理解和掌握相关课程知识,包括机械设计、自动控制、机器人学等。
关键词:工业机械手、自由度、机器人、SCARA机械手、步进电机、谐波减速器、传动设计、装配作业、教学实验
总结来说,服务机器人手臂关节结构设计说明书详细阐述了如何设计一款小型服务装配机械手,特别是SCARA型机械手的结构特点、传动系统以及选用的驱动装置,强调了设计的实用性和教育意义。通过这样的设计,可以为电子元器件装配提供高效、精确的解决方案,并为学习者提供实践与理论相结合的学习平台。
第 2 章 总体方案设计
本设计课题要求机械手完成水平面内搬运运动,这包括 XY 平面运动,以及
Z 向上下运动。为了完成装配作业,还要求手腕具有一定柔顺性。这样一来如果
全部运动都设计成由机械手本体来完成,那么必然增加机械手本体复杂性,并会
影响机械手位置精度。另一方面,这种机械手通用性差,成本也高
[3]
。
鉴于上述原因,同时考虑机械手应具有良好的通用性,以保证这个课题完成
后,所提供机械手技术,具有较好的产业化、商品化前景。所以,在设计中,本
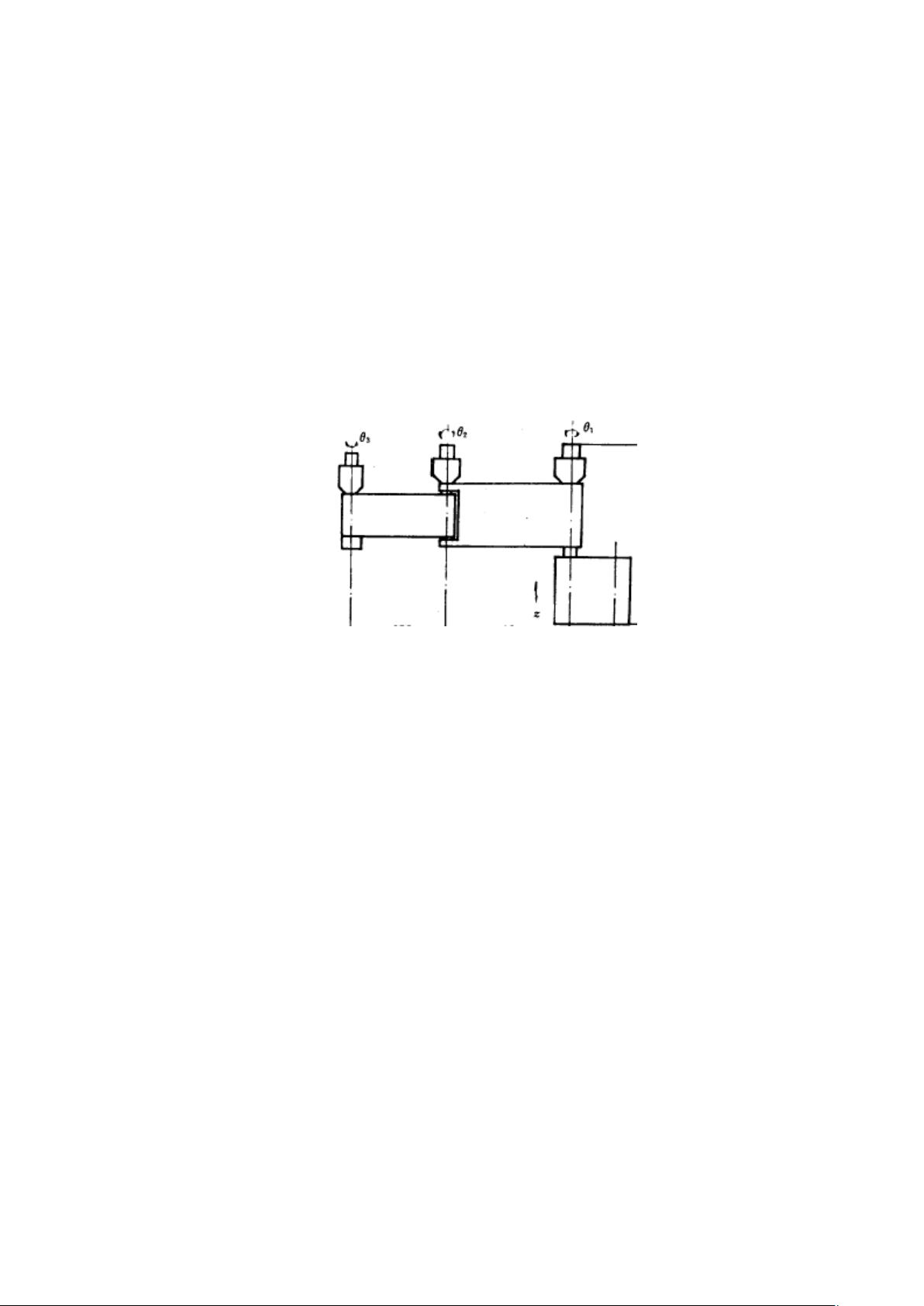
人把机械手设计成平面关节式机械手,具有四个自由度:两个完成水平面内回转
运动,一个完成 Z 轴上下运动,另一个完成绕 Z 轴旋转运动。
图 2-1 机械手结构示意图
2.1 工业服务机器手的传动系统设计
2.1.1 机械手驱动系统的比较与选择
工业服务机械手的驱动可分为液压,气动和电动三种基本类型。
1.液压驱动
液压传动机械手有很大的抓取能力,抓取力可高达上百公斤,液压力可达
7Mpa,液压传动平稳,动作灵敏,但对密封性要求高,不宜在高或低温现场工
作,需配备一套液压系统。
液压驱动有以下特点:
(1)输出功率很大,压力范围为 50-140N/cm
2
(2)控制性能:利用液体的不可压缩性,控制精度较高,输出功率大,可
无级调速,反应灵敏,可实现连续轨迹控制。
(3)结构适当,执行机构可标准化、模拟化,易实现直接驱动。功率/质量
较大,体积小,结构紧凑,密封问题较大。
(4)液压系统可实现自我润滑,过载保护方便,使用寿命长。液压驱动需
配置液压系统,易产生泄漏而影响运动精度。系统易发热,出现故障后较
难找出原因。
剩余34页未读,继续阅读
2021-10-08 上传
2021-09-18 上传
2021-10-12 上传
2023-07-12 上传
2023-07-15 上传
2021-10-11 上传

omyligaga
- 粉丝: 80
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握压缩文件管理:2工作.zip文件使用指南
- 易语言动态版置入代码技术解析
- C语言编程实现电脑系统测试工具开发
- Wireshark 64位:全面网络协议分析器,支持Unix和Windows
- QtSingleApplication: 确保单一实例运行的高效库
- 深入了解Go语言的解析器组合器PARC
- Apycula包安装与使用指南
- AkerAutoSetup安装包使用指南
- Arduino Due实现VR耳机的设计与编程
- DependencySwizzler: Xamarin iOS 库实现故事板 UIViewControllers 依赖注入
- Apycula包发布说明与下载指南
- 创建可拖动交互式图表界面的ampersand-touch-charts
- CMake项目入门:创建简单的C++项目
- AksharaJaana-*.*.*.*安装包说明与下载
- Arduino天气时钟项目:源代码及DHT22库文件解析
- MediaPlayer_server:控制媒体播放器的高级服务器
