恒润科技解析CAN通信基础与汽车电子应用
需积分: 48 67 浏览量
更新于2024-07-18
3
收藏 1.6MB PDF 举报
"恒润科技公司的CAN基础教程,涵盖了CAN通讯在汽车电子领域的应用,由北京资深公司设计,适合CAN入门学习。"
CAN(Controller Area Network)是20世纪80年代初由德国博世(Bosch)公司为了解决现代汽车内部多个控制单元和测试仪器之间的实时数据交换问题而开发的一种串行通信协议。传统的汽车线束连接复杂,多个控制器之间通过硬线连接,导致线束繁多、成本高昂且易出故障。CAN网络的出现,极大地简化了汽车内部的通信结构。
1. **概述**
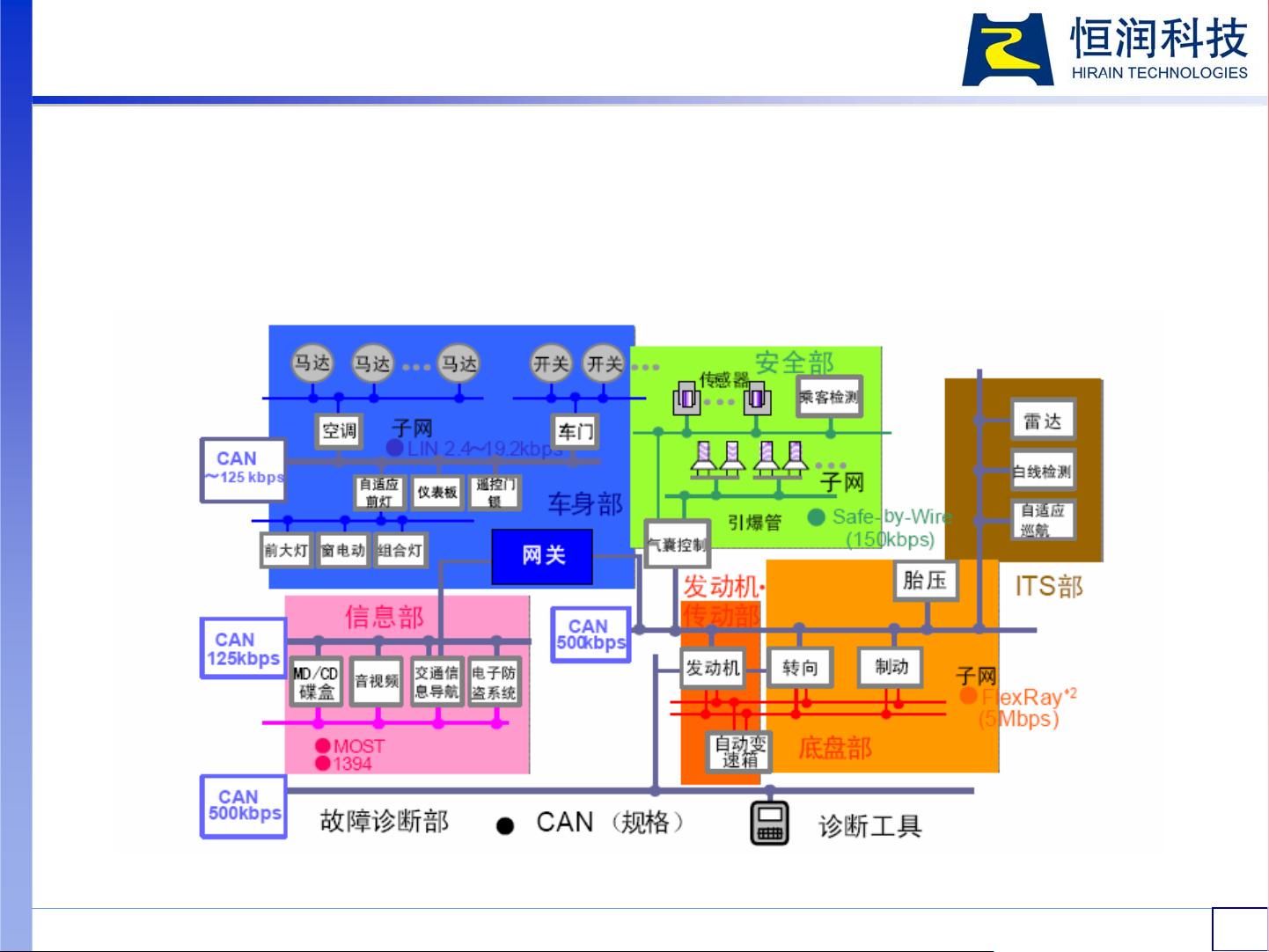
- CAN协议最初是为了解决汽车行业的特定需求,如动力传动控制、发动机控制、主动悬挂、ABS/ASR、变速器控制等不同模块间的数据交换。
- 在CAN网络中,汽车的各个子系统如动力传动控制、车身控制、仪表板等,可以通过两条CAN总线进行高效、可靠的通信,减少了线束数量和复杂性。
2. **汽车总线与CAN标准**
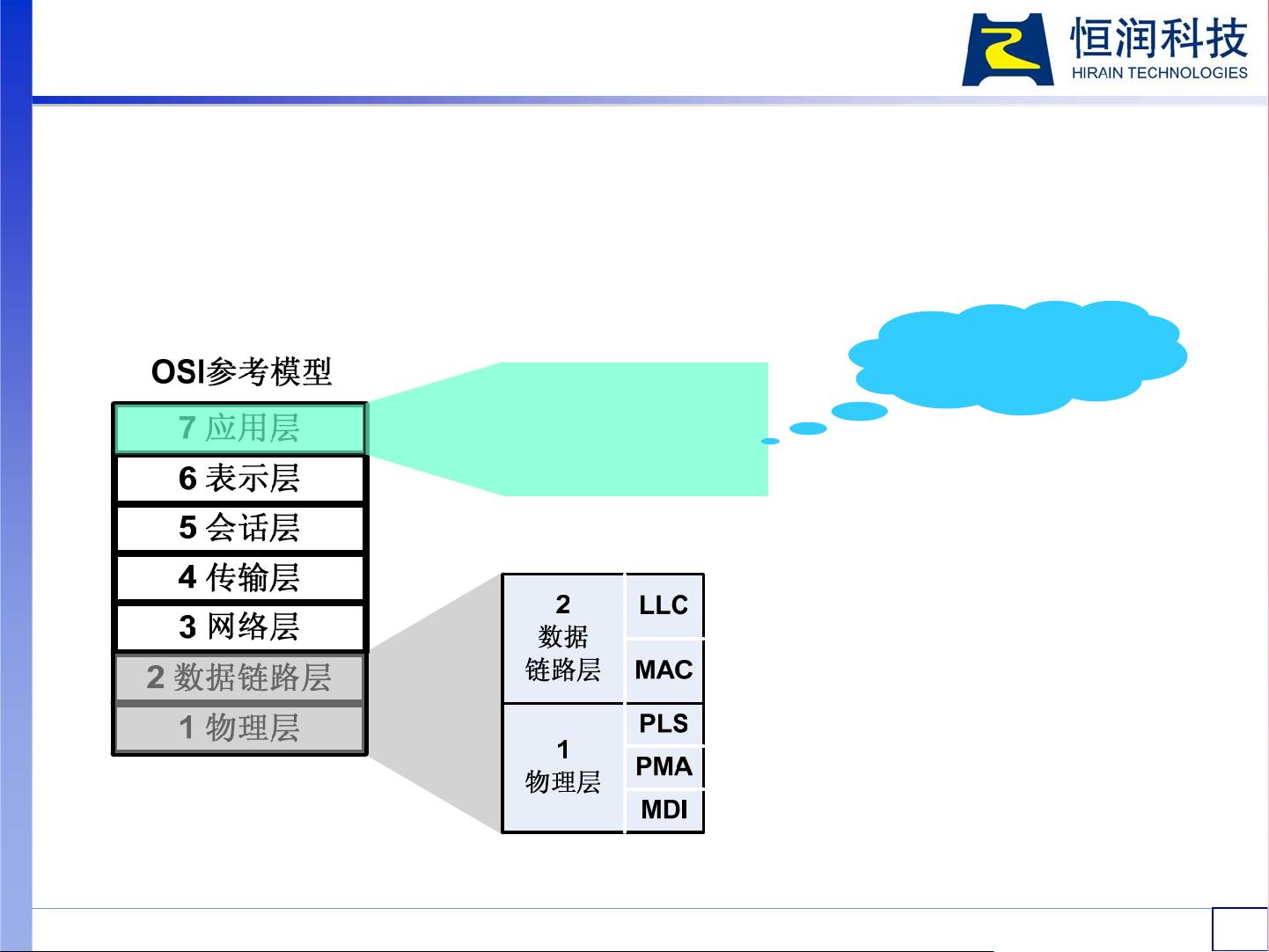
- CAN是一种符合ISO 11898和ISO 11519标准的局部网络技术,它定义了物理层、数据链路层以及应用层的规范。
- CAN总线支持多主站系统,允许多个节点同时发送数据,通过仲裁机制决定哪个节点优先发送。
3. **CAN的通信机制**
- CAN协议采用非破坏性位仲裁,当多个节点同时发送数据时,优先级高的节点继续发送,其他节点则停止发送,避免数据冲突。
- 数据以报文形式在网络上传输,每个报文包含一个标识符(ID),用于区分不同的消息类型和优先级。
4. **数据帧**
- CAN数据帧由起始界定符、仲裁场、控制场、数据场和CRC校验等部分组成,其中仲裁场决定了报文的优先级。
- 数据场可以携带最多8个字节的数据,满足多种信息传输需求。
5. **错误检测与错误帧**
- CAN协议具有强大的错误检测能力,包括位错误、应答错误、格式错误等,一旦检测到错误,会发送错误帧进行警告。
- 错误处理机制保证了网络的可靠性和稳定性,防止错误数据的传播。
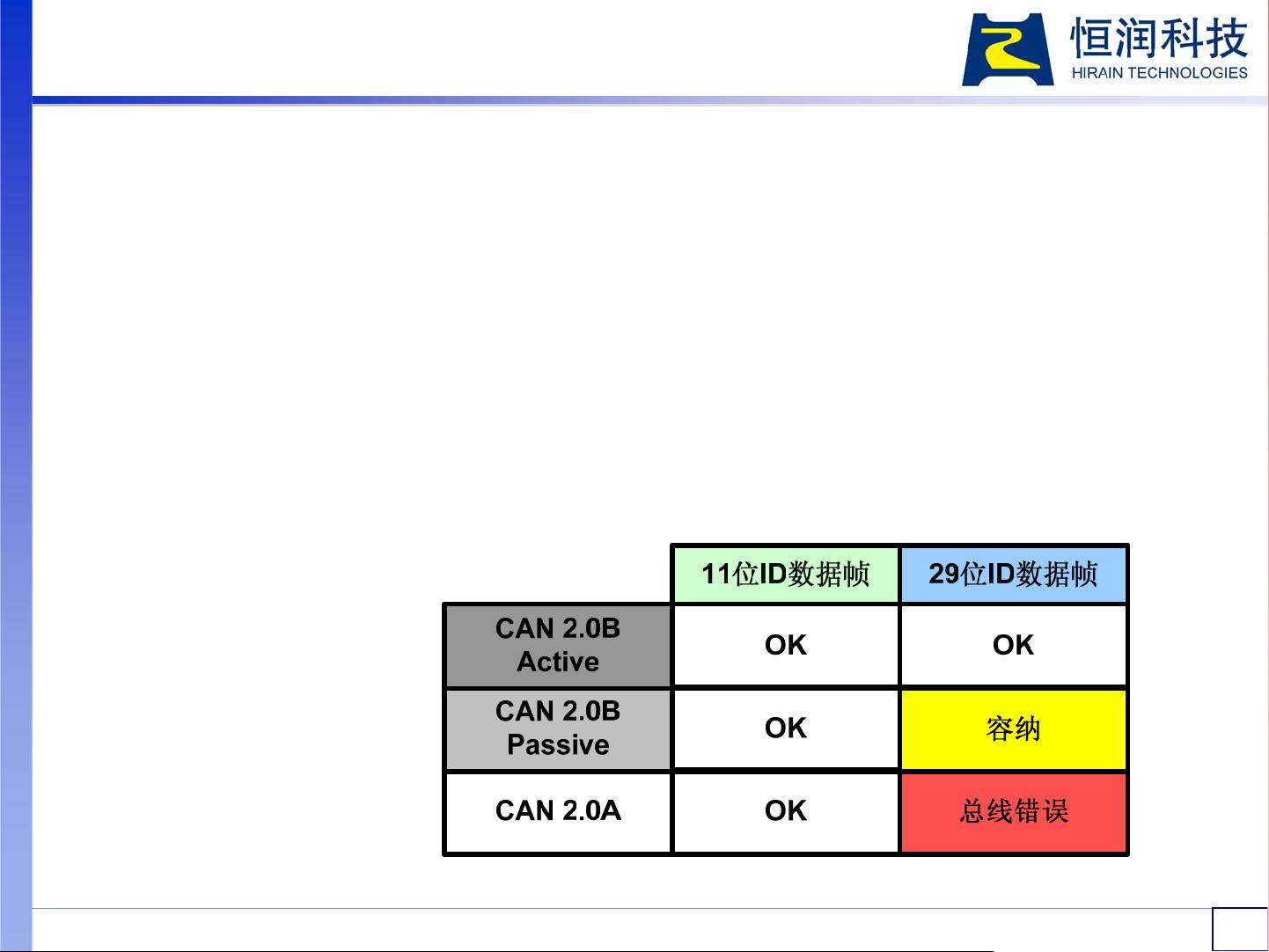
6. **CAN的帧格式**
- CAN有两种基本帧格式:标准帧(11位ID)和扩展帧(29位ID),以适应不同复杂程度的应用场景。
- 标准帧适用于简单的系统,扩展帧则提供了更多的地址空间,可用于更复杂的网络。
7. **位定时与同步**
- 位定时是CAN通信的关键,确保所有节点在同一时间点对同一信号位进行采样,以实现同步。
- 位定时参数包括位时间、采样点位置等,需要根据传输速率和物理距离进行调整。
8. **物理连接**
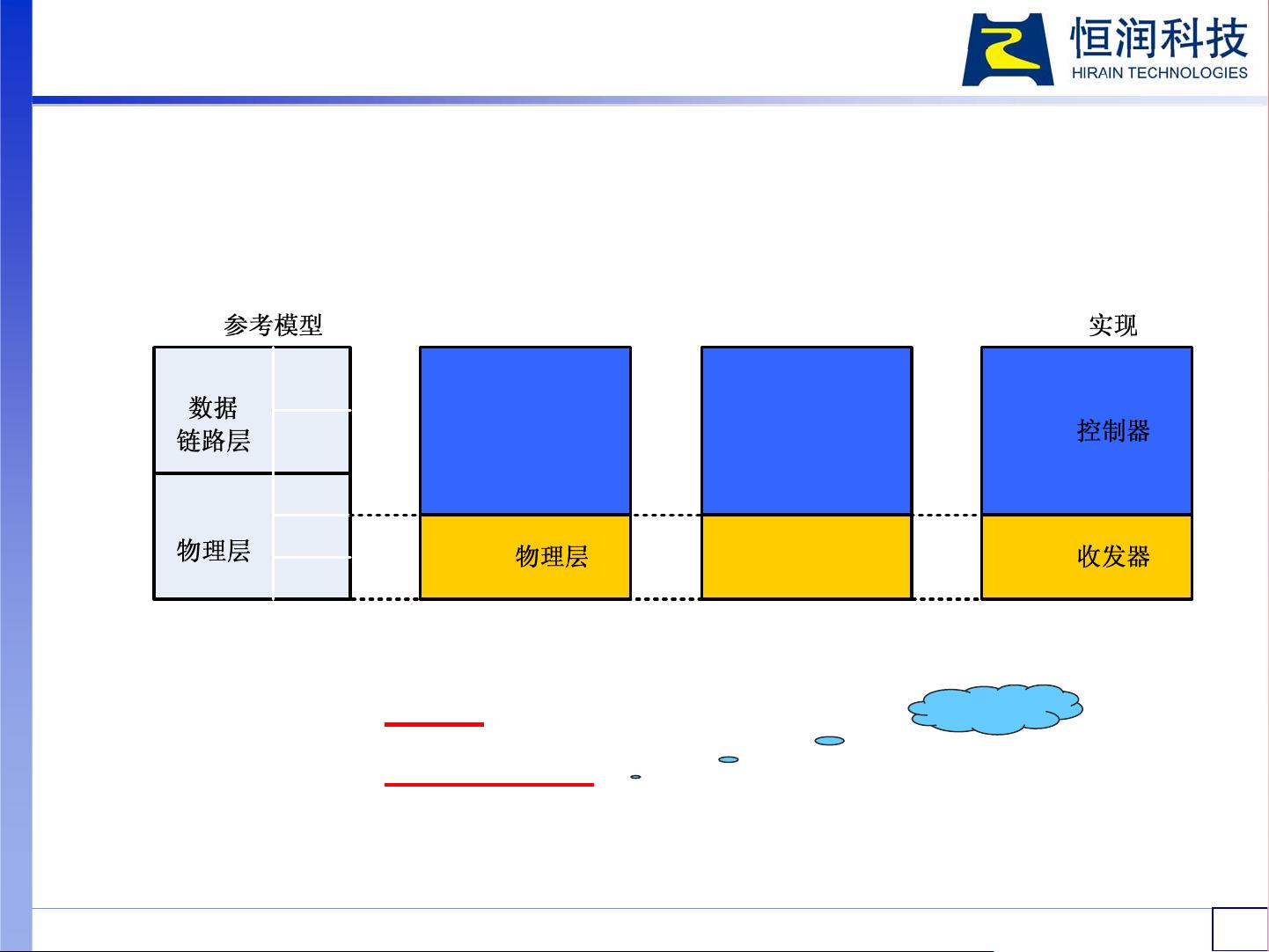
- CAN总线通常由两根差分线(CAN_H和CAN_L)组成,具有良好的抗干扰能力。
- 节点通过CAN收发器与总线相连,实现物理层的信号传输。
恒润科技的CAN基础教程详细介绍了CAN协议的基本原理、通信机制及其在汽车电子中的应用,对于初学者来说,是一份很好的学习资料。通过学习,读者将能够理解CAN网络的工作方式,并具备初步的CAN通信设计能力。

2020-07-27 上传
2020-04-15 上传
2019-04-04 上传
2023-06-20 上传
2023-06-24 上传
2023-07-29 上传
2023-06-22 上传
2023-07-02 上传
2023-08-01 上传

兢兢业业的软件工程师
- 粉丝: 2
- 资源: 76
 我的内容管理
展开
我的内容管理
展开







最新资源
- Aspose资源包:转PDF无水印学习工具
- Go语言控制台输入输出操作教程
- 红外遥控报警器原理及应用详解下载
- 控制卷筒纸侧面位置的先进装置技术解析
- 易语言加解密例程源码详解与实践
- SpringMVC客户管理系统:Hibernate与Bootstrap集成实践
- 深入理解JavaScript Set与WeakSet的使用
- 深入解析接收存储及发送装置的广播技术方法
- zyString模块1.0源码公开-易语言编程利器
- Android记分板UI设计:SimpleScoreboard的简洁与高效
- 量子网格列设置存储组件:开源解决方案
- 全面技术源码合集:CcVita Php Check v1.1
- 中军创易语言抢购软件:付款功能解析
- Python手动实现图像滤波教程
- MATLAB源代码实现基于DFT的量子传输分析
- 开源程序Hukoch.exe:简化食谱管理与导入功能
