改进龙伯格观测器的高频方波法PMSM转速估计与矢量控制研究
版权申诉
85 浏览量
更新于2024-06-28
收藏 541KB DOCX 举报
本研究论文探讨了基于高频方波电压注入法和改进龙伯格观测器的永磁同步电机(PMSM)转速估计技术。PMSM因其高效、高功率密度和无直流磁场的优点,在交流传动和电动汽车等领域具有广泛应用。然而,实现高精度的磁场定向控制,尤其是无传感器控制,对转子位置和速度的准确估计提出了挑战。
传统的无位置传感器控制方法,如基于旋转或脉动高频正弦信号注入,虽然能提供转子位置信息,但需要配合低通滤波器,这可能导致控制性能受限于滤波器的时延。为了克服这一问题,近年来,研究人员转向了基于方波信号注入的策略,如龙伯格观测器。这种观测器无需低通滤波,通过电磁转矩前馈提高位置跟踪性能,理论上能将控制器带宽提升到较高的频率范围。
然而,龙伯格观测器在处理频繁变化的负载扰动时存在不足,其稳定性和转子位置跟踪性能依赖于负载转矩预测的精度。针对这个问题,本文作者对龙伯格位置观测器进行了创新性改进。首先,作者深入剖析了永磁同步电机的矢量控制原理,特别是在方波高频电压注入法下的工作机制。通过将速度指令与负载条件分离,构建了一个新的二阶系统模型,设计了一种不受负载影响的前馈控制参数。
改进后的观测器设计旨在增强其在负载扰动下的鲁棒性,通过将速度控制与负载变化解耦,提高了系统的动态响应能力。论文详细介绍了永磁同步电机在空间矢量表示下的电压方程,并展示了改进观测器在仿真试验中的优势,结果显示其在复杂负载条件下能够保持良好的转子位置估计性能。
总结来说,本研究旨在通过改进龙伯格观测器,提高永磁同步电机在无传感器矢量控制下的性能,尤其是在动态负载环境下的转速估计精度,从而满足现代工业和电动汽车应用对于高性能电机控制的需求。这对于推动电机控制技术的发展以及实际应用具有重要意义。
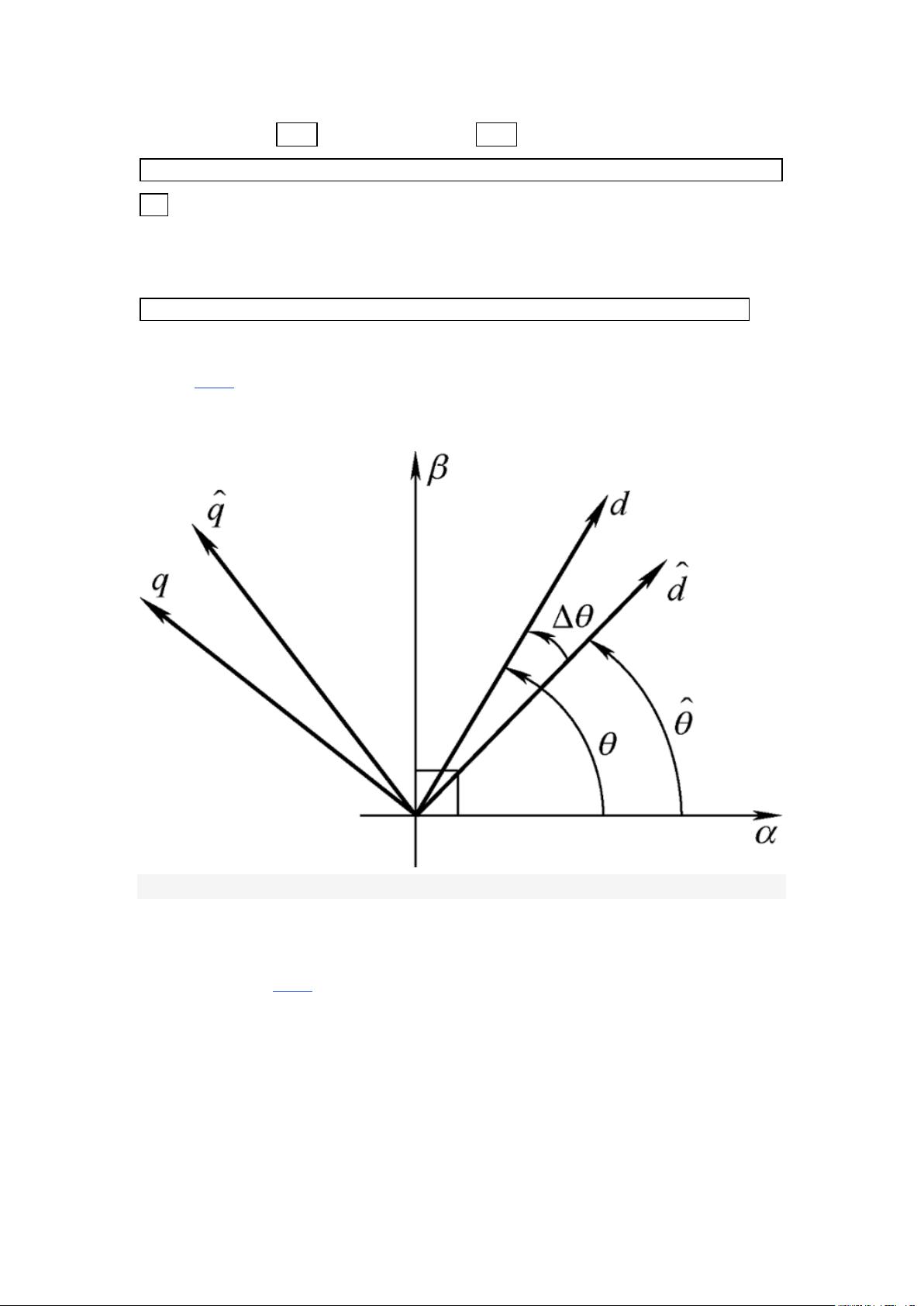
式 中 , u_d^' u_d^' 和 u_q^' u_q^' 为 向 估 计
\mathord{\buildrel{\lower3pt\hbox{$^$}} \over d} - \mathord{\buildrel{\lower3pt\hbox{$^$}} \ove
r q} \mathord{\buildrel{\lower3pt\hbox{$^$}} \over d} - \mathord{\buildrel{\lower3pt\
hbox{$^$}} \over q}坐标系注入的高频电压;Δθ 为估计转子参考系与实际转子参
考 系 的 角 度 差
\left( {\Delta \theta = \mathord{\buildrel{\lower3pt\hbox{$^$}} \over \theta } - \theta } \right) \left
( {\Delta \theta = \mathord{\buildrel{\lower3pt\hbox{$^$}} \over \theta } - \theta } \ri
ght),如图 2 所示。
图 2
图 2 转子参考系和估计转子参考系电压平面
为了不影响电机的输出转矩,高频信号通常只注入估计的 d 轴。方波型注
入电压示意图如图 3 所示,其中 UinUin 为注入电压幅值。
图 3
剩余15页未读,继续阅读
2023-07-20 上传
2022-11-04 上传
2022-07-13 上传
2021-10-13 上传
2021-10-03 上传
2022-12-15 上传
2022-01-03 上传

罗伯特之技术屋
- 粉丝: 4510
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- jspm-sample.tk:示例 jspm 应用程序 - 使用 angular 开发到生产流程
- 解析玩具:解析玩具
- 理财管理信息系统.rar
- Tampermonkey-Scripts
- 外语培训机构信息网页模板
- spideForm:动态HTML 5画布,用于创建显示表单的图形
- e-indicacao-fe
- StereoCorrespondenceGC:使用图切割技术实现立体对应
- parameterized-reporting-presentation
- TrackerUI
- ReactTemplate.zip
- 小度wifi、360wifi、MiWifi、wifibao_MacOS-15可用.zip
- replaceall:替换 JavaScript 字符串中的所有实例
- 扇贝学习工具-crx插件
- Base32-Module:用于与Base10相互转换的Base32Module
- hss-urlmeme:轻松将图像发布到HSS聊天室
