CC2530单片机智能小车:远程控制与自动避障设计
需积分: 50 57 浏览量
更新于2024-07-18
收藏 2.15MB DOC 举报
"基于单片机的智能小车系统设计"
这篇毕业设计说明书详细阐述了基于CC2530单片机的智能小车系统的开发与实现。智能小车系统的核心在于其能够根据用户需求进行远程控制,并具备自动避障功能。设计中,主要涵盖了以下几个关键知识点:
1. **CC2530单片机**:CC2530是由TI(德州仪器)公司生产的一款微控制器,它集成了Zigbee无线通信功能,适合于构建无线传感器网络和智能控制系统。在这个智能小车系统中,它作为控制中心,处理各种输入和输出信号。
2. **硬件设计**:
- **最小系统**:这是单片机运行的基础,包括电源、晶振和复位电路等,确保CC2530正常启动和运行。
- **无线收发模块**:用于实现远程控制,上位机通过无线方式发送指令到小车,可能采用Zigbee或蓝牙等无线通信技术。
- **超声波模块**:利用超声波测距原理,检测小车周围环境,提供避障信息。
- **电动机驱动模块**:控制小车的前进、后退、转向等动作,通常包含电机控制器和功率放大电路。
- **减速电动机**:用于驱动小车,减速电机提供更大的扭矩,使小车能更稳定地运行。
3. **软件设计**:
- **主程序**:负责整体流程的控制和协调,处理各种中断事件。
- **无线发射子程序**:编码和发送上位机的控制指令。
- **无线接收子程序**:接收并解析无线模块接收到的信号,执行相应操作。
- **中断程序**:响应超声波传感器和其他硬件设备的中断请求,如避障决策。
- **设置子程序**:可能包括参数配置、初始化等功能。
4. **自动避障**:当超声波传感器探测到前方有障碍物时,会将信息发送给CC2530,单片机通过算法判断小车应停止或转向,实现避障。
5. **远程控制**:通过无线模块,上位机可以向小车发送指令,实现远程操控,比如改变行驶方向、速度等。
6. **模块化设计**:软件采用模块化设计,便于代码维护和扩展,每个模块专注于特定任务,提高系统效率。
7. **系统调试**:软硬件联调是确保系统正常运行的关键步骤,通过调试确保所有功能都能正确实现,尤其是自动避障和远程控制功能。
关键词:CC2530单片机、远程控制、自动避障,这些关键词概括了设计的核心技术和功能。这个智能小车系统不仅展示了单片机控制技术的应用,还体现了无线通信、传感器技术以及嵌入式系统设计的综合运用。

3
盐城工学院本科生毕业设计说明书( 2015)
第二阶段 世界主要发达国家对智能车辆的研发日益看重是在上世纪80年代中后
期。在欧洲,1986年普罗米修斯项目开始在智能车辆方面的探索。在美洲,在1995
年,国家自动高速公路系统联盟简称NAHSC由美国成立,它们的目标之一就是智能
车辆在现实生活中的可实现性,为以后智能车辆的实现打下了基础。在亚洲,在
1996年,高速公路先进巡航/辅助驾驶研究会由日本成立,它的目的就是研究智能车
辆关于导航方面的问题,也正因为这个研制使得日本智能车辆在整体技术上都得到
很大的提升。在上世纪80年代,研制开发智能车辆形成一种潮流,世界上各大著名
汽车制造商都把矛头指向智能车辆的研发上,使得智能车辆在这一时期得到飞速的
发展。
第三阶段 在上世纪90年代时,对智能车辆研制进入白热化,许多国家都看到智
能车辆发展前景与迫切性,在这一时期智能车辆研制,开发,生产都得到空前提升
最为突出的是Navlab系列的10台自主车(Navlab1—Navlab10)的研究在美国卡内基
梅隆大学(Carnegie Mellon University)机器人研究所完成,取得了显著的成就。
目前,智能车辆的第三阶段仍然在继续,现在国外智能车辆的发展方向也是由
第三阶段的成果作为代表。在世界工业设计和界科学界中,在众多的研究机构中研
发的智能车辆具有代表性的有:
德意志联邦大学的研究 1985年,第一辆VaMoRs智能原型车辆设计成功,这种
采用机器视觉的智能车户外高速公路上为100km/h,这个速度是当时进行速度测试的
速 度 , 而 机 器 视 觉 保 证 了 横 向 和 纵 向 的 车 辆 控 制 。 1 9 8 8年 , 在 都 灵 的
PROMRTHEUS项目第一次委员会会议上,拥有自动行进、停车,而且可以向它后面
的车发送相关驾驶信息智能车辆维塔(VITA,7t)在这次会议上展示。UBM视觉系统
是这两辆车的系统,这是一个具有极高的稳定性双目视觉系统。
荷兰鹿特丹港口的研究 根据自身需求,荷兰鹿特丹港口研究的智能车辆主要应
用在工厂货物的运输这一方面。荷兰的Combi road系统,货物的运输都是靠无人驾驶
的车辆完成的,这些车辆行驶的路面是经过特别处理的,应用额磁性导航参照物,
智能车辆探测障碍物只靠一个光矩阵检测。荷兰政府对这系统比较青睐,在荷兰南
部,在讨论关于这种系统的问题,他们计划修建这种道路,用荷兰鹿特丹港口研究
的智能车辆把货物运输到荷兰各个地方,减少了对人的需求,而且也会减少各种人
在驾驶中遇见的问题。
日本大阪大学的研究 大阪大学的Shirai实验室所研制的航位推测系统(Dead
Reckoning System)智能小车,这辆智能小车的转向角是依靠电位计与旋转编码器来
获取,达到了对智能小车的定位这一效果。
另外,美国麻省理工学院、英国国防部门的研究、斯特拉斯堡实验中心、奔驰
公司、美国卡内基梅隆大学在智能车辆研究方面都有着显著的成就。
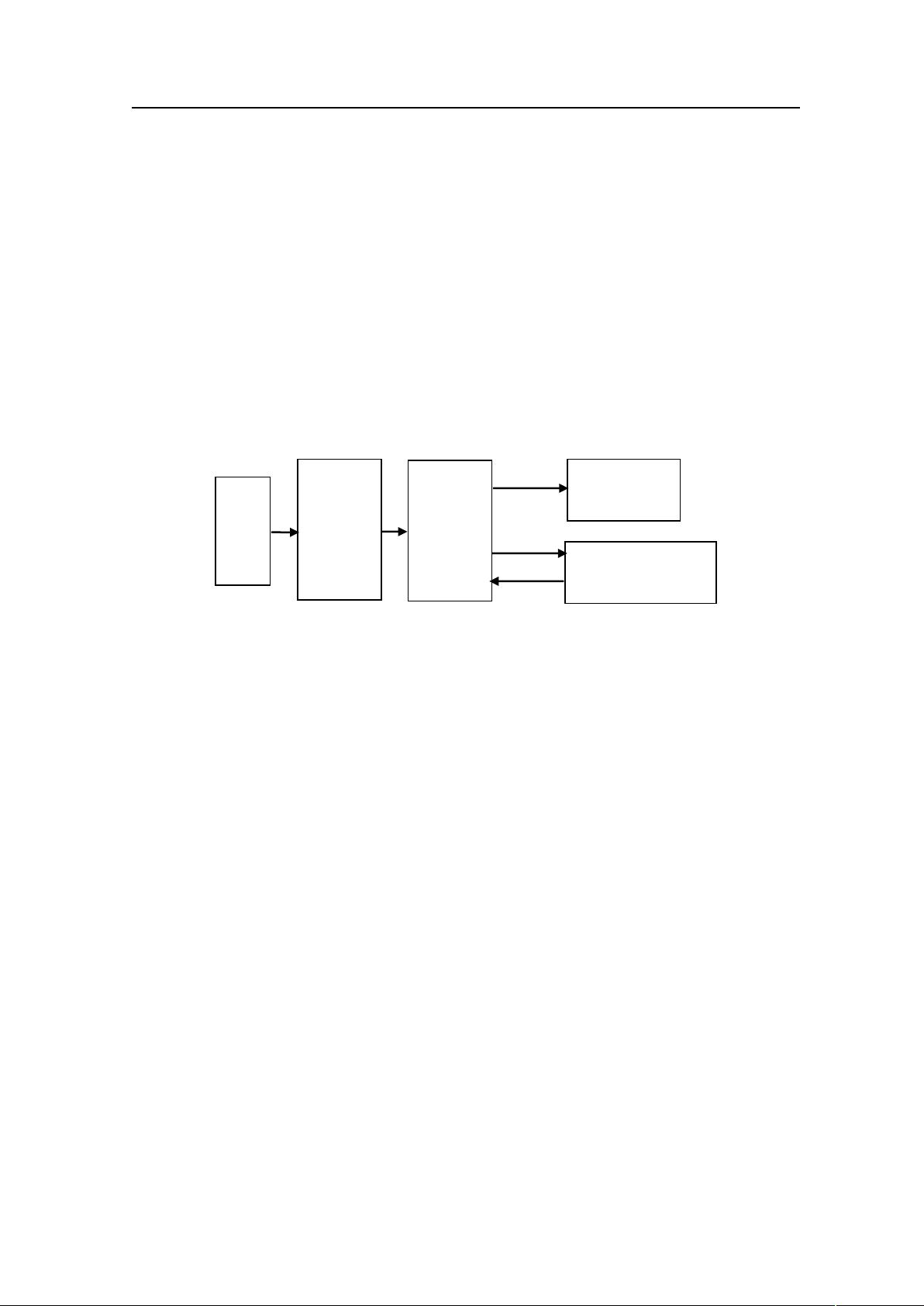
3.方案设计及论证
3.1总体设计
设计主要是制作一款既能进行远程控制又能智能采集信息并能做出相应反应实
现避障功能的小车。智能小车的自动避障功能体现了小车智能化的要求,远程控制
很适合当代高端玩具的发展要求,也可成为学习单片机嵌入式控制系统的一个典型
实例。
剩余42页未读,继续阅读
109 浏览量
115 浏览量
点击了解资源详情
2021-09-24 上传
2023-08-29 上传
156 浏览量
2023-07-03 上传

约翰·塞纳
- 粉丝: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- C#实现DataGridView过滤功能的源码分享
- Python开发者必备:VisDrone数据集工具包
- 解决ESXi5.x安装无网络适配器问题的第三方工具使用指南
- GPRS模块串口通讯实现与配置指南
- WinCvs客户端安装使用指南及服务端资源
- PCF8591T AD实验源代码与使用指南
- SwiftForms:Swift实现的表单创建神器
- 精选9+1个网站前台模板下载
- React与BaiduMapNodejs打造上海小区房价信息平台
- 全面解析手机软件测试的实战技巧与方案
- 探索汇编语言:实验三之英文填字游戏解析
- Eclipse VSS插件版本1.6.2发布
- 建站之星去版权补丁介绍与下载
- AAInfographics: Swift语言打造的AAChartKit图表绘制库
- STM32高频电子线路实验完整项目资料下载
- 51单片机实现多功能计算器的原理与代码解析
