




Malvar的高效Bayer阵列插值算法:提升图像质量
需积分: 35 181 浏览量
更新于2024-09-10
收藏 901KB PDF 举报
本文档主要探讨了Henrique S. Malvar、Li-wei He和Ross Cutler在Microsoft Research团队发表的论文《Bayer阵列插值算法:高质量线性插值在单CCD数码相机色彩图像去马赛克过程中的应用》。该研究针对的是现代数码相机中广泛采用的Bayer阵列传感器技术,这种传感器在光学路径前通常配备了一个以Bayer模式排列的彩色滤镜阵列(CFA)。
在传统的单CCD数码相机中,每个像素点仅捕捉单一颜色的信息,如红色、绿色或蓝色。为了得到完整的彩色图像,一种常见的处理方法是通过插值算法将这些有限的颜色信息扩展到全色域。Bayer阵列插值算法正是这种过程的关键步骤,它试图通过相邻像素的颜色信息推断出缺失的颜色。
论文的核心内容集中在Malvar提出的新型线性插值技术上。与传统的双线性插值方法相比,这种简单但高效的滤波器在图像的峰值信噪比(PSNR)上显示出显著提升,提高了大约5.5分贝。对于随机和亮度插值,新型插值器相较于近期引入的线性插值器,也实现了约0.7分贝的性能改进。
此外,这个线性插值算法的优势还体现在对非线性插值算法的超越。它避免了非线性处理带来的艺术性失真,同时保持了较低的计算复杂度。这对于实时成像系统来说尤为重要,因为它能够在保证图像质量的同时,降低对处理器资源的需求。
Malvar的Bayer阵列插值算法提供了一种在数码相机成像质量与计算效率之间取得良好平衡的方法,对于提高彩色图像的清晰度和逼真度具有重要意义。这一研究成果不仅适用于单CCD相机,也对后续的图像处理技术发展产生了积极影响。
HIGH-QUALITY LINEAR INTERPOLATION
FOR DEMOSAICING OF BAYER-PATTERNED COLOR IMAGES
Henrique S. Malvar, Li-wei He, and Ross Cutler
Microsoft Research
One Microsoft Way, Redmond, WA 98052, USA
ABSTRACT
This paper introduces a new interpolation technique for demo-
saicing of color images produced by single-CCD digital cameras.
We show that the proposed simple linear filter can lead to an
improvement in PSNR of over 5.5 dB when compared to bilinear
demosaicing, and about 0.7 dB improvement in R and B interpo-
lation when compared to a recently introduced linear interpola-
tor. The proposed filter also outperforms most nonlinear demo-
saicing algorithms, without the artifacts due to nonlinear process-
ing, and a much reduced computational complexity.
1. INTRODUCTION
Digital cameras are quite popular today; many users are switch-
ing away from regular film photography. For cost reduction,
most digital cameras use a single charge-coupled device (CCD)
sensor, with the CCD pixels preceded in the optical path by a
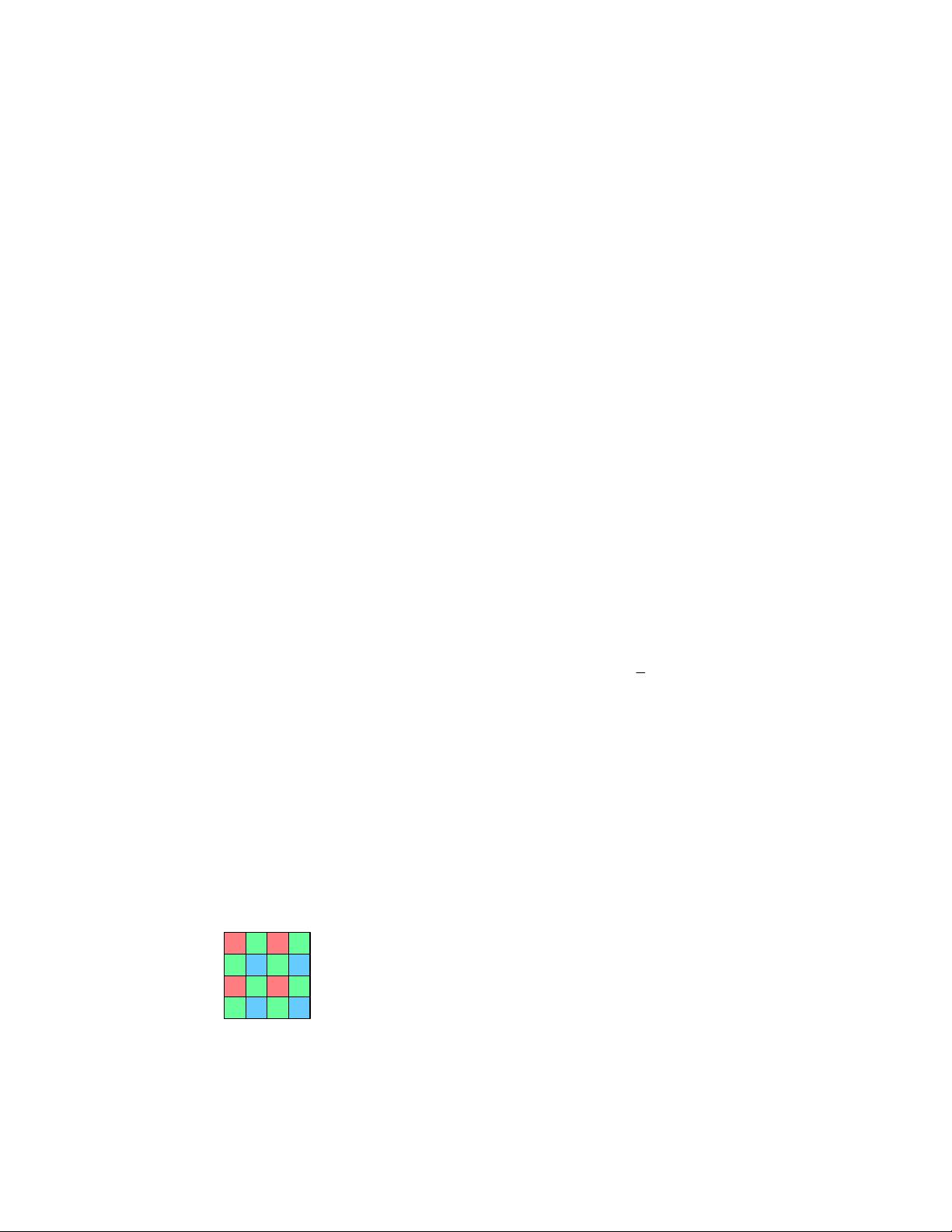
color filter array (CFA) in a Bayer mosaic pattern, as shown in
Fig. 1. For each 2×2 set of pixels, two diagonally opposed pixels
have green filters, and the other two have red and blue filters.
Since G carries most of the luminance information for humans,
its sampling rate is twice that of R and B.
We call demosaicing the problem of interpolating back the
image captured with a CFA, so that for every CCD pixel we can
associate a full RGB value. The simplest approach to demo-
saicing is bilinear interpolation [1]–0, in which the three color
planes are independently interpolated using symmetric bilinear
interpolation from the nearest neighbors of the same color. As
expected, bilinear interpolation generates significant artifacts,
especially across edges and other high-frequency content, since it
doesn’t take into account the correlation among the RGB values.
Practical demosaicing algorithms take such correlation into ac-
count, either with better linear filters [4], or with nonlinear filters
that adapt interpolation smoothness to a measure of image activ-
ity or edginess [1]–0.
In this paper we present a simple linear demosaicing filter,
with better performance and lower complexity than that in [4].
Our filter also outperforms many nonlinear algorithms. In Sec-
tion 2 we quickly review some of the techniques proposed for
improved demosaicing performance, and in Section 3 we present
our new linear filter. Performance comparisons and conclusions
are presented in Sections 4 and 5, respectively.
2. BEYOND BILINEAR DEMOSAICING
Referring to Fig. 1, in bilinear demosaicing the green value g(i,j)
at a pixel position (i,j) that falls in a red or blue pixel, is com-
puted by the average of the neighboring green values in a cross
pattern:
( , ) {(0, 1), (0,1), ( 1,0), (1,0)}
1
ˆ
(, ) ( , )
4
mn
g
ij gi mj n
=− −
=++
∑
(1)
which corresponds to estimating the green value at the pixel
marked ‘+’ in Fig. 1 as the average of the observed green values
marked ‘
·’. At image boundaries, only pixels that fall within the
image are included, and the scaling adjusted. For the R and B
colors the same equation applies (with a diagonal cross pattern),
except that for pixel positions (i,j) that fall in a green pixel only
two red neighboring values are averaged to produce an interpo-
lated red value; the same holds for blue. Besides the computa-
tional simplicity of (1), its output value is guaranteed to have the
same dynamic range of the input value, so no overflow logic is
needed on the output value.
Exploiting the correlation among the RGB channels is the
main idea for improving demosaicing performance. Specifically,
we can assume that in a luminance/chrominance decomposition,
the chrominance components don’t vary much across pixels. In
the constant-hue approach of Freeman [2],[5], the green channel
is bilinearly interpolated, and then the R and B channels are in-
terpolated such as to maintain a constant hue, defined as the R/G
and B/G ratios. Even at the expense of computing those divi-
sions, it still produces visible artifacts [2]. Better results can be
obtained by starting with bilinearly interpolated G pixels, and
G
G B
R
▪
▪ ▪
▪
+
Figure 1. Typical Bayer mosaic for color image cap-
ture in single-CCD digital cameras; the G subimage
has twice as many pixels as the R and B subimages.
下载后可阅读完整内容,剩余3页未读,立即下载
126 浏览量
2024-10-30 上传
2024-10-30 上传
2009-10-14 上传
2015-07-05 上传
609 浏览量
2020-02-15 上传

bruce_hj_chen
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开








最新资源
- Java函数速查手册:学习者必备的快速参考指南
- Spring Bean属性注入:深入注解方式解析
- 无需安装的五格式图书阅读器
- U盘数据恢复大师最新版下载使用说明
- 蝠ta引擎:掌握射线技术的C++项目
- LabVIEW课程VI:Generate Waveform.vi免费下载指南
- Chromas软件:查看DNA测序序列的便捷工具
- 掌握JavaScript:源码集锦与编程精髓
- 掌握Spring Bean装配:使用注解方式深入理解
- 高效在线预览工具组合:FlexPaper、jodconverter及swftools
- React-MovieApp教程:搭建与使用指南
- PiPE3.0版本Petri网仿真工具正式发布
- Android编程入门:从零开始的中文教程指南
- 水下压力传感器标定套件分解装置的研究与应用
- Borland C/C++ 3.1 完整版:16位程序编译器
- 轻松实现easyui的panel拖拽功能






















