深度学习在线算法:永不停歇的学习机
需积分: 9 121 浏览量
更新于2024-08-29
收藏 590KB PDF 举报
本文档深入探讨了"在永不停歇学习机中的在线学习",由Andrew J. Simpson撰写,主要针对深度学习领域,特别是在机器学习框架下的一种新型神经网络模型——Perpetual Learning Machine(PLM)。PLM的设计灵感源于大脑的自我监督学习机制,它实现了类似人脑的"即学即忘"(on-the-fly learning),能够在无监督或自监督状态下持续进行Stochastic Gradient Descent(随机梯度下降)。
与传统深度学习模型相比,PLM的关键创新在于其能够在一个自我维持的、永不停止的学习环境中工作,这使得学习过程与记忆保持一致,从而解决了深度神经网络在连接学习与记忆之间存在的显著差距。通过引入Perpetual Stochastic Gradient Descent(PSGD),PLM能够在训练过程中实现高效的并行处理,提高了学习效率。
文章的核心内容包括以下几个方面:
1. **问题背景**:指出尽管深度学习模型在特定静态任务上表现出与人脑类似的性能,但在学习与记忆的持久性方面还存在重大差距。这是作者研究Perpetual Learning Machine的出发点。
2. **Perpetual Learning Machine**:这是一种新的深度学习架构,其设计目标是模仿人类大脑的动态学习方式,通过永久性的自我监督学习过程,实现知识的持续更新和存储。
3. **Perpetual Stochastic Gradient Descent**:这是PLM的核心优化算法,它允许模型在不断的迭代中不断调整参数,无需人为提供大量标记数据,降低了对外部监督的依赖。
4. **Self-supervised learning**:在PLM中,模型通过内在的反馈机制进行自我监督,这有助于提升模型的泛化能力,使其在未知数据上也能表现良好。
5. **Parallel dither**:文章还探讨了并行处理技术如何在PLM中应用,以加速模型的学习过程,提高计算效率。
6. **抽象与合成的双重性**:作者将深度学习中的抽象和合成比喻为阴阳(Yin and Yang),强调了模型在提取高级特征和生成新知识之间的平衡。
7. **总结与前景**:文章最后总结了PLM的贡献,并提出了未来研究可能扩展的方向,如更深层次的自我组织学习和普适性等。
这篇文章为读者提供了理解深度学习在线学习新方法的深入见解,尤其是如何在机器学习框架内构建一个能像人脑一样不断学习和记忆的模型,这对于解决现实世界中的复杂问题具有重要意义。
On-the-Fly Learning in a Perpetual Learning
Machine
Andrew J.R. Simpson
#1
#
Centre for Vision, Speech and Signal Processing, University of Surrey,UK
1
Andrew.Simpson@Surrey.ac.uk
Abstract—Despite the promise of brain-inspired machine
learning, deep neural networks (DNN) have frustratingly failed
to bridge the deceptively large gap between learning and memory.
Here, we introduce a Perpetual Learning Machine; a new type of
DNN that is capable of brain-like dynamic ‘on the fly’ learning
because it exists in a self-supervised state of Perpetual Stochastic
Gradient Descent. Thus, we provide the means to unify learning
and memory within a machine learning framework. We also
explore the elegant duality of abstraction and synthesis: the Yin
and Yang of deep learning.
Index terms—Perpetual Learning Machine, Perpetual
Stochastic Gradient Descent, self-supervised learning, parallel
dither, Yin and Yang.
I. I
NTRODUCTION
It is an embarassing fact that while deep neural networks
(DNN) are frequently compared to the brain, and even their
performance found to be similar in specific static tasks, there
remains a critical difference; DNN do not exhibit the fluid and
dynamic learning of the brain but are static once trained. For
example, to add a new class of data to a trained DNN it is
necessary to add the respective new training data to the pre-
existing training data and re-train (probably from scratch) to
account for the new class. By contrast, learning is essentially
additive in the brain – if we want to learn a new thing, we do.
Thus, whilst there is little doubt that the learning of the
brain and machine learning are essentially the same, the
learning of the brain involves the emergent phenomenon of
memory which has failed to emerge from machine learning.
Indeed, recent machine-inspired approaches to ‘memory’ have
involved explicit add-on storage facilities [e.g., 1] which
explicitly discriminate between learning (training – i.e., of
weights) and memory (storage – i.e., of data). Thus, the
problem has been brushed under the carpet.
In this article, we describe a novel form of supervised
learning model, which we call a Perpetual Learning Machine,
which gives rise to the basic properties of memory. Our model
involves two DNNs, one for storage and the other for recall.
The storage DNN learns the classes of some training images.
The recall DNN learns to synthesise the same images from the
same classes. Together, the two networks hold, encoded, the
training set. We then place these pair of DNNs in a self-
supervised and homeostatic state of Perpetual Stochastic
Gradient Descent (PSGD). During each step of PSGD, a
random class is chosen and an image synthesised from the
recall DNN. This randomly synthesised image is then used in
combination with the random class to train both DNNs via
non-batch SGD. I.e., the PSGD is driven by training data that
is synthesised from memory according to random classes. We
next demonstrate that new classes may be learned on the fly
by introducing them, via ‘new experience’ SGD steps, into the
path of PSGD. Over time, new classes are assimilated without
disruption of earlier learning and hence we demonstrate a
machine which both learns and remembers.
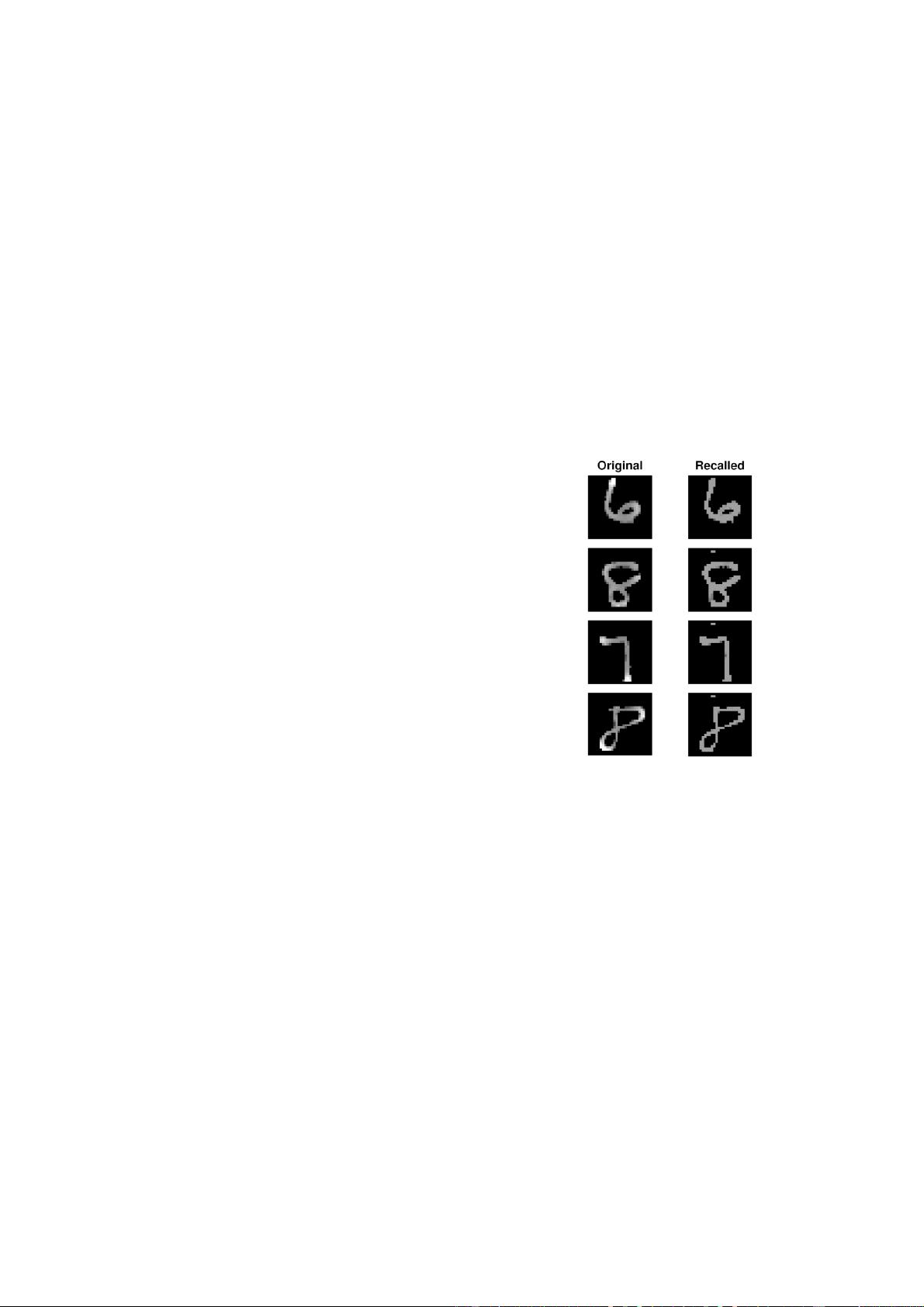
Fig. 1. Recall of training images. On the left are plotted MNIST
digits and on the right are plotted the same digits synthesised using
the recall DNN.
II. M
ETHOD
We chose the well-known MNIST hand-written digit
dataset [2]. First, we unpacked the images of 28x28 pixels into
vectors of length 784. Example digits are given in Fig. 1. Pixel
intensities were normalized to zero mean.
Perpetual Memory. In order to test the idea of perpetual
memory, through perpetual learning, we required our model to
learn to identify a collection of images. We took the first 75 of
the MNIST digits and assigned each to an arbitrary class (this
is arbitrary associative learning). This gave 75 unique classes,
each associated with a single, specific digit. The task of the
model was to recognise the images and assign to them the
correct (arbitrary) classes. We split the 75 digits into 50 ‘learn
during training’ examples and 25 ‘learn later on the fly’ test
examples. The first 50 training examples were learned with
typical SGD and discarded. Hence, they were not available for
later use during assimilation of additional classes. The latter
25 examples were held back for insertion during PSGD.
下载后可阅读完整内容,剩余4页未读,立即下载
2019-08-14 上传
2022-07-07 上传
2020-07-05 上传
2023-12-26 上传
2023-05-26 上传
2023-07-27 上传
2023-06-09 上传
2023-06-13 上传
2023-06-12 上传

richard285
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular实现MarcHayek简历展示应用教程
- Crossbow Spot最新更新 - 获取Chrome扩展新闻
- 量子管道网络优化与Python实现
- Debian系统中APT缓存维护工具的使用方法与实践
- Python模块AccessControl的Windows64位安装文件介绍
- 掌握最新*** Fisher资讯,使用Google Chrome扩展
- Ember应用程序开发流程与环境配置指南
- EZPCOpenSDK_v5.1.2_build***版本更新详情
- Postcode-Finder:利用JavaScript和Google Geocode API实现
- AWS商业交易监控器:航线行为分析与营销策略制定
- AccessControl-4.0b6压缩包详细使用教程
- Python编程实践与技巧汇总
- 使用Sikuli和Python打造颜色求解器项目
- .Net基础视频教程:掌握GDI绘图技术
- 深入理解数据结构与JavaScript实践项目
- 双子座在线裁判系统:提高编程竞赛效率
