无监督深度域适应:反向传播驱动的特征转换
需积分: 0 142 浏览量
更新于2024-09-01
收藏 3.18MB PDF 举报
本文档深入探讨了"第二十四篇——Unsupervised Domain Adaptation by Backpropagation",这是一个关于无监督领域适应的关键研究论文。作者Yaroslav Ganin和Victor Lempitsky来自Skolkovo Institute of Science and Technology (SklTech),他们针对深度学习中的一个重要挑战提出了创新方法。传统上,深度架构依赖于大规模标注数据进行训练,但在某些任务缺乏标记数据的情况下,领域适应显得尤为重要,特别是在源领域和目标领域存在相似性质但数据来源不同的情况下,比如利用合成图像作为辅助。
论文的核心贡献是提出了一种新的无监督领域适应方法,这种方法允许模型同时处理大量的源领域标注数据和目标领域的未标注数据。这种方法强调了深度特征的学习,这些特征不仅能够有效区分源领域的任务,还表现出跨域不变性,即在源域和目标域之间保持一致性。这在很大程度上拓展了深度学习的应用范围,因为即使没有目标领域的标注信息,模型也能通过反向传播进行有效的训练。
论文中的关键创新在于引入了一个简单的梯度反转层,它巧妙地调整了梯度的方向,使得模型在学习源任务的同时,逐渐抵消源域与目标域之间的差异。这一技术使得任何前馈模型,无论基础架构如何,都能够通过标准的反向传播进行无监督领域适应的训练。
总结来说,这篇论文为深度学习中的无监督领域适应提供了一个实用且可扩展的框架,它突破了对大量标注数据的依赖,为实际应用中数据匮乏的问题提供了新的解决方案。这对于计算机视觉、自然语言处理等众多领域都有着深远的影响,特别是在迁移学习和跨模态任务中,该方法无疑将推动领域适应技术的发展。
Unsupervised Domain Adaptation by Backpropagation
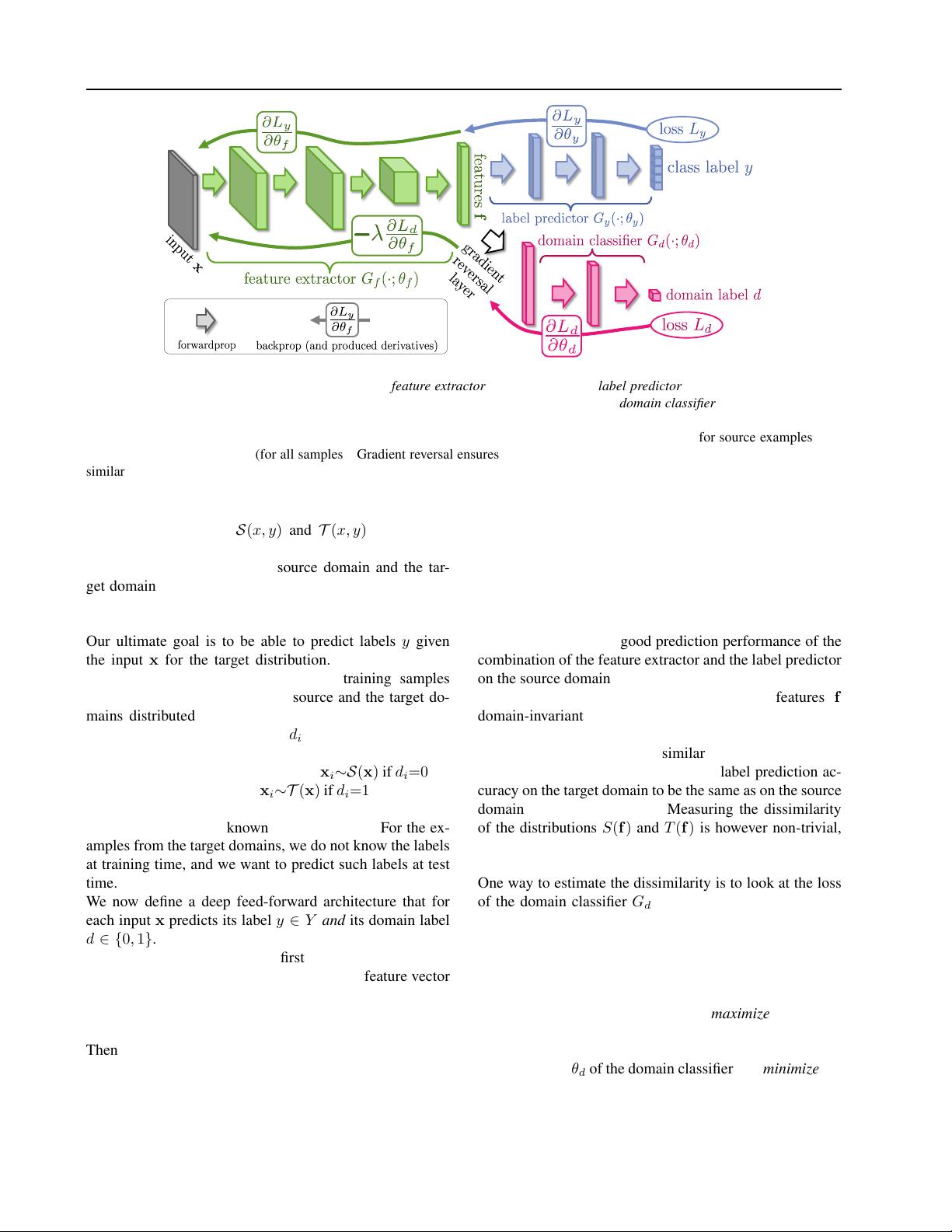
Figure 1. The proposed architecture includes a deep feature extractor (green) and a deep label predictor (blue), which together form
a standard feed-forward architecture. Unsupervised domain adaptation is achieved by adding a domain classifier (red) connected to the
feature extractor via a gradient reversal layer that multiplies the gradient by a certain negative constant during the backpropagation-
based training. Otherwise, the training proceeds in a standard way and minimizes the label prediction loss (for source examples) and
the domain classification loss (for all samples). Gradient reversal ensures that the feature distributions over the two domains are made
similar (as indistinguishable as possible for the domain classifier), thus resulting in the domain-invariant features.
forward models can handle. We further assume that there
exist two distributions S(x, y) and T (x, y) on X ⊗ Y ,
which will be referred to as the source distribution and
the target distribution (or the source domain and the tar-
get domain). Both distributions are assumed complex and
unknown, and furthermore similar but different (in other
words, S is “shifted” from T by some domain shift).
Our ultimate goal is to be able to predict labels y given
the input x for the target distribution. At training time,
we have an access to a large set of training samples
{x
1
, x
2
, . . . , x
N
} from both the source and the target do-
mains distributed according to the marginal distributions
S(x) and T (x). We denote with d
i
the binary variable (do-
main label) for the i-th example, which indicates whether
x
i
come from the source distribution (x
i
∼S(x) if d
i
=0) or
from the target distribution (x
i
∼T (x) if d
i
=1). For the ex-
amples from the source distribution (d
i
=0) the correspond-
ing labels y
i
∈ Y are known at training time. For the ex-
amples from the target domains, we do not know the labels
at training time, and we want to predict such labels at test
time.
We now define a deep feed-forward architecture that for
each input x predicts its label y ∈ Y and its domain label
d ∈ {0, 1}. We decompose such mapping into three parts.
We assume that the input x is first mapped by a mapping
G
f
(a feature extractor) to a D-dimensional feature vector
f ∈ R
D
. The feature mapping may also include several
feed-forward layers and we denote the vector of parame-
ters of all layers in this mapping as θ
f
, i.e. f = G
f
(x; θ
f
).
Then, the feature vector f is mapped by a mapping G
y
(la-
bel predictor) to the label y, and we denote the parameters
of this mapping with θ
y
. Finally, the same feature vector f
is mapped to the domain label d by a mapping G
d
(domain
classifier) with the parameters θ
d
(Figure 1).
During the learning stage, we aim to minimize the label
prediction loss on the annotated part (i.e. the source part)
of the training set, and the parameters of both the feature
extractor and the label predictor are thus optimized in or-
der to minimize the empirical loss for the source domain
samples. This ensures the discriminativeness of the fea-
tures f and the overall good prediction performance of the
combination of the feature extractor and the label predictor
on the source domain.
At the same time, we want to make the features f
domain-invariant. That is, we want to make the dis-
tributions S(f ) = {G
f
(x; θ
f
) | x∼S(x)} and T (f ) =
{G
f
(x; θ
f
) | x∼T (x)} to be similar. Under the covariate
shift assumption, this would make the label prediction ac-
curacy on the target domain to be the same as on the source
domain (Shimodaira, 2000). Measuring the dissimilarity
of the distributions S(f ) and T (f ) is however non-trivial,
given that f is high-dimensional, and that the distributions
themselves are constantly changing as learning progresses.
One way to estimate the dissimilarity is to look at the loss
of the domain classifier G
d
, provided that the parameters
θ
d
of the domain classifier have been trained to discrim-
inate between the two feature distributions in an optimal
way.
This observation leads to our idea. At training time, in or-
der to obtain domain-invariant features, we seek the param-
eters θ
f
of the feature mapping that maximize the loss of
the domain classifier (by making the two feature distribu-
tions as similar as possible), while simultaneously seeking
the parameters θ
d
of the domain classifier that minimize the
loss of the domain classifier. In addition, we seek to mini-
mize the loss of the label predictor.
剩余10页未读,继续阅读
2021-09-25 上传
2017-02-09 上传
2021-03-17 上传
2021-11-20 上传
2021-09-28 上传
2022-01-04 上传
2021-11-19 上传
2021-11-20 上传
2021-11-20 上传

疯狂java杰尼龟
- 粉丝: 4w+
- 资源: 13
 我的内容管理
展开
我的内容管理
展开







最新资源
- IEEE 14总线系统Simulink模型开发指南与案例研究
- STLinkV2.J16.S4固件更新与应用指南
- Java并发处理的实用示例分析
- Linux下简化部署与日志查看的Shell脚本工具
- Maven增量编译技术详解及应用示例
- MyEclipse 2021.5.24a最新版本发布
- Indore探索前端代码库使用指南与开发环境搭建
- 电子技术基础数字部分PPT课件第六版康华光
- MySQL 8.0.25版本可视化安装包详细介绍
- 易语言实现主流搜索引擎快速集成
- 使用asyncio-sse包装器实现服务器事件推送简易指南
- Java高级开发工程师面试要点总结
- R语言项目ClearningData-Proj1的数据处理
- VFP成本费用计算系统源码及论文全面解析
- Qt5与C++打造书籍管理系统教程
- React 应用入门:开发、测试及生产部署教程
