微软Kinect传感器在计算机视觉中的应用综述
需积分: 10 133 浏览量
更新于2024-07-24
收藏 6.71MB PDF 举报
"微软的Kinect传感器是一种低成本的设备,它为广泛的用户提供了高分辨率的深度和视觉(RGB)感应。Kinect传感器提供的深度和视觉信息的互补性为解决计算机视觉的基本问题开辟了新的可能性。这篇综述文章详细回顾了基于Kinect的计算机视觉算法和应用,将所讨论的方法分为预处理、目标跟踪与识别、人体活动分析、手部姿态分析和室内3D映射等类别,并对比了它们与仅使用RGB信息的方法的优缺点。"
Kinect是微软推出的一种创新性的体感设备,它以其独特的功能在游戏、交互式设计和计算机视觉领域引起了广泛关注。该传感器的核心特点是能够同时捕捉到场景的深度信息和彩色图像,这使得它能够实现更为精确的环境理解和用户行为分析。
在预处理方面,Kinect的数据包括了红外图像和深度图,这些数据需要进行一系列的处理,如去噪、校正和融合,以便于后续的计算机视觉算法使用。这些预处理步骤对于提高整体系统性能至关重要,尤其是对于在复杂环境中的应用。
目标跟踪与识别是Kinect应用的一大亮点。通过结合深度信息和彩色图像,系统可以更准确地定位和识别物体,即使在光照条件变化或背景复杂的场景下也能保持稳定的效果。此外,这种跟踪能力还使得Kinect在人机交互、虚拟现实和游戏等领域具有广泛应用。
人体活动分析是另一大研究热点。利用Kinect的深度信息,可以实时追踪人体关节,分析人的动作和姿态,这对于健身指导、康复治疗甚至游戏设计都有重要意义。例如,可以开发出能够识别特定运动或舞蹈动作的应用。
手部姿态分析则利用Kinect的高精度深度感知来识别和跟踪手指动作,这对于手势控制和无接触交互有着革命性的影响。在无障碍技术、智能家居控制和远程医疗等领域,这种技术具有广泛的应用潜力。
最后,室内3D映射是Kinect的另一个强大功能。通过扫描环境并构建3D模型,用户可以创建房间的数字孪生,用于室内设计、导航或者虚拟现实体验。这种方法在建筑、房地产和室内设计行业中非常有用。
微软Kinect传感器通过提供丰富的视觉和深度数据,极大地推动了计算机视觉领域的发展,其相关算法和应用不断扩展,涵盖了众多领域,从娱乐到专业应用,展示了强大的创新性和实用性。
HAN et al.: ENHANCED COMPUTER VISION WITH MICROSOFT KINECT SENSOR 1321
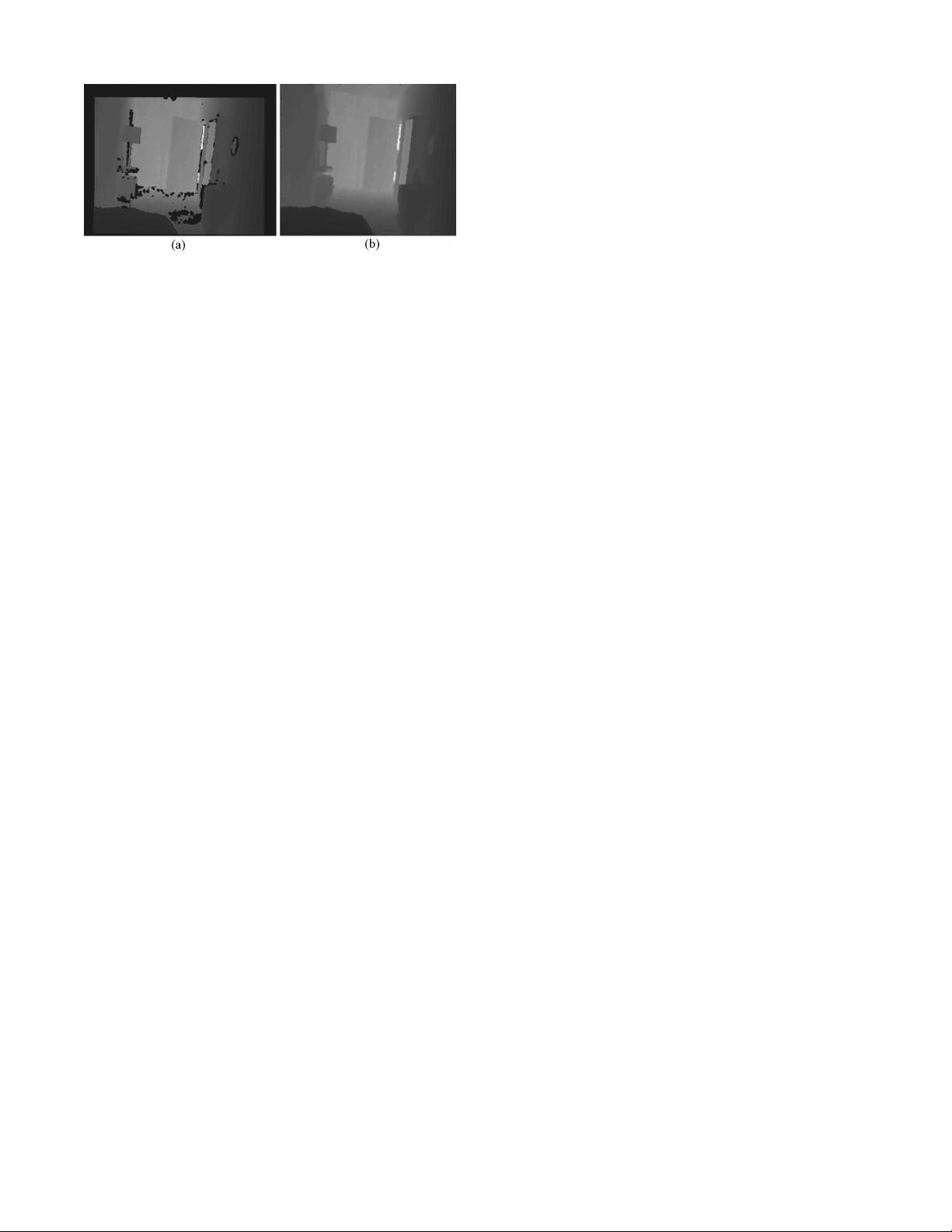
Fig. 4. Example for hole-filling based on the bilateral filter [25]. (a) Raw
depth image. (b) Depth image after filtering.
turns out that Kinect is able to capture the relative 3-D
coordinates of markers with minor errors (< 1cm) in case the
sensor is positioned in an ideal range (1m to 3m) and with an
effective field of view. In [15], authors examine the accuracy
of joint localization and the robustness of pose estimation
with respect to more realistic setups. In the experiment, six
exercises are conducted, in which the subject is either seated
or positioned next to a chair. The exercise is generally chal-
lenging for human pose recognition since the self-occlusion
appears frequently and the capturing view angle is changed
over time. The acquired 3-D location of each joint is then
compared to the data generated by a marker-based motion
capture system, which can be considered as ground truth data.
According to the results, Kinect has a significant potential as
a low-cost alternative for real-time motion capturing and body
tracking in healthcare applications. The accuracy of the Kinect
joint estimation is comparable to marker-based motion capture
in a more controlled body pose (e.g., standing and exercising
arms). However, in general poses, the typical error of Kinect
skeletal tracking is about 10 cm. Moreover, the current Kinect
algorithm frequently fails due to occlusions, nondistinguishing
depth (limbs close to the body) or clutter (other objects in the
scene).
III. Preprocessing
The data obtained with Kinect normally cannot be directly
fed into the designed computer vision algorithms. Most of
the algorithms take advantage of rich information (RGB and
depth) attached to a point. In order to correctly combine the
RGB image with the depth data, it is necessary to spatially
align the RGB camera output and the depth camera output. In
addition, the raw depth data are very noisy and many pixels
in the image may have no depth due to multiple reflections,
transparent objects or scattering in certain surfaces (such as
human tissue and hair). Those inaccurate/missing depth data
(holes) need to be recovered prior to being used. Therefore,
many systems based on Kinect start with a preprocessing mod-
ule, which conducts application-specific camera recalibration
and/or depth data filtering.
A. Kinect Recalibration
In fact, Kinect has been calibrated during manufacturing.
The camera parameters are stored in the device’s memory,
which can be used to fuse the RGB and depth information.
This calibration information is adequate for casual usage, such
as object tracking. However, it is not accurate enough for
reconstructing a 3-D map, for which a highly precise cloud of
3-D points should be obtained. Moreover, the manufacturer’s
calibration does not correct the depth distortion, and is thus
incapable of recovering the missing depth.
Zhang et al. [16] and Herrera et al. [17] develop a cali-
bration board based technique, which is derived from Zhang’s
camera calibration technique used for the RGB camera [18].
In this method, 3-D coordinates of the feature points on the
calibration card are obtained from the RGB camera’s coordi-
nate system. Feature-point matching between the RGB image
and the depth image is able to spatially correlate those feature
points between two different images. This spatial mapping
helps feature points to get their true depth values based on
the RGB camera’s coordinate system. Meanwhile, the depth
camera measures 3-D coordinates of those feature points in the
IR camera’s coordinate system. It assumes that the obtained
depth values by the depth camera can be transformed to the
true depth values by an affine model. As a result, the key is
to estimate the parameters of the affine model, which can be
done by minimizing the distances between the two point sets.
This technique combined with a calibration card allows users
to recalibrate the Kinect sensor in case the initial calibration is
not accurate enough for certain applications. The weakness of
this method is that it does not specifically pay attention to the
depth distortion. Correcting the depth distortion may become
unavoidable for most 3-D mapping scenarios.
There are a few publications that discuss solutions for
Kinect depth distortion correction. Smisek et al. [11] discover
that the Kinect device has shown radially symmetric distor-
tions. In order to correct this distortion, a spatially varying
offset to the calculated depth is applied. The offset at a given
pixel position is calculated as the mean difference between
measured depth and expected depth in metric coordinates.
In [19], a disparity distortion correction method is proposed
based on the observation that a more accurate calibration can
be made by correcting the distortion directly in disparity units.
An interesting paper [20] deals with more practical issues,
which investigates a possible influence of thermal and envi-
ronmental conditions when calibrating Kinect. The experiment
turns out that variations of the temperature and air draft have a
notable influence on Kinect’s images and range measurements.
Based on the findings, temperature-related rules have been
established in the paper, which reduce errors in the calibration
and measurement process of the Kinect.
B. Depth Data Filtering
Another preprocessing step is depth data filtering, which can
be used for depth image denoising or missing depth (hole)
recovering. A naive approach considers the depth data as a
monochromatic image and thus applies existing image filters
on it, such as a Gaussian filter. This simple method works only
for regions where the signal statistics is in favor of the underly-
ing filter. A more sophisticated algorithm [21] investigates the
specific characteristics of a depth map created by Kinect, and
finds out that there are two types of occlusions/holes caused
by different reasons. The algorithm automatically separates
剩余16页未读,继续阅读
2012-10-31 上传
2013-07-17 上传
2017-03-29 上传
2013-08-14 上传
2012-05-18 上传
2013-11-20 上传
2018-03-30 上传
2015-03-20 上传
2015-10-17 上传

无视007
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- SSM Java项目:StudentInfo 数据管理与可视化分析
- pyedgar:Python库简化EDGAR数据交互与文档下载
- Node.js环境下wfdb文件解码与实时数据处理
- phpcms v2.2企业级网站管理系统发布
- 美团饿了么优惠券推广工具-uniapp源码
- 基于红外传感器的会议室实时占用率测量系统
- DenseNet-201预训练模型:图像分类的深度学习工具箱
- Java实现和弦移调工具:Transposer-java
- phpMyFAQ 2.5.1 Beta多国语言版:技术项目源码共享平台
- Python自动化源码实现便捷自动下单功能
- Android天气预报应用:查看多城市详细天气信息
- PHPTML类:简化HTML页面创建的PHP开源工具
- Biovec在蛋白质分析中的应用:预测、结构和可视化
- EfficientNet-b0深度学习工具箱模型在MATLAB中的应用
- 2024年河北省技能大赛数字化设计开发样题解析
- 笔记本USB加湿器:便携式设计解决方案
