基于CPLD/FPGA的交通灯控制器设计:优势与实现
版权申诉
50 浏览量
更新于2024-06-25
1
收藏 387KB DOC 举报
本文档主要探讨了基于CPLDFPGA的交通灯控制器设计,通过Verilog HDL语言进行系统设计和实现。首先,文章简述了EDA技术的发展和其在数字电路设计中的重要性,强调了EDA技术如Quartus II在FPGA/CPLD芯片下载过程中的关键作用,特别是在解决传统设计中的接线问题、降低故障率和提高可靠性方面。
设计的核心内容包括五个部分:
1. **EDA技术发展及设计题目介绍**:介绍了EDA技术的基本概念,作为现代电子设计的重要工具,它利用计算机和软件工具进行电路系统设计,特别针对大规模集成电路(ASIC)和可编程逻辑器件(PLD)如FPGA/CPLD。
2. **设计方案论证**:设计者详细讨论了选择基于CPLD/FPGA的交通灯控制器方案的原因,通过对比分析传统设计方法,强调了其集成化、可靠性高以及小型化的优点。
3. **单元模块设计**:
- **有源晶振电路**:确保系统稳定的时间基准。
- **供电电路**:为整个控制器提供稳定的电源。
- **JTAG下载电路**:便于在硬件上对FPGA进行程序更新和调试。
- **LED灯输出电路**:控制红绿黄三色LED灯的开关,实现交通信号指示。
- **数码管显示电路**:用于计数或显示等待时间等信息。
4. **特殊器件介绍**:重点讲解了CPLD器件,如EPM570T144C5,这是一种特定的CPLD芯片,具有适合该设计的特性。
5. **软件实现**:采用Verilog HDL进行软件设计,分为软件设计和软件仿真两部分。软件设计阶段定义了控制逻辑,而软件仿真则验证了设计的正确性和性能。
最后,文档还包含了总结、致谢、参考文献以及一个最小系统的附件,展示了整个设计项目的完整流程和技术细节。
这篇文档深入探讨了如何利用CPLD/FPGA技术和Verilog HDL语言来构建高效、可靠的交通灯控制系统,展现了EDA技术在硬件设计中的核心作用。
方案二:由复杂可编程逻辑器件 CPLD,通过 EDA 技术来实现交通灯控制电路。
采用 VerilogHDL 硬件描述语言实现交通灯的控制电路设计。设计思路为根据交通
控制器要实现的功能,考虑用两个并行执行的 awlays 模块来分别控制 A 和 B 两个方向
的四盏灯,这两个 always 模块使用同一个时钟信号,以进行同步。也就是说,两个 always
模块的敏感信号是同一个,每个 always 模块控制一个方向的四种灯按如下顺序点亮,
并往复循环:绿灯—黄灯—左拐灯—黄灯—红灯。
每种灯亮的时间采用一个减法计数器进行计数,计数器用同步预置法设计,这样只
需改变预置数据,就能改变计数器的模,因此每个方向只要一个计数器进行计时即可。
为便于显示灯亮的时间,计数器的输出均采用 BCD 码,显示由 4 个数码管来完成,A 方
向和 B 方向各用两个数码管。
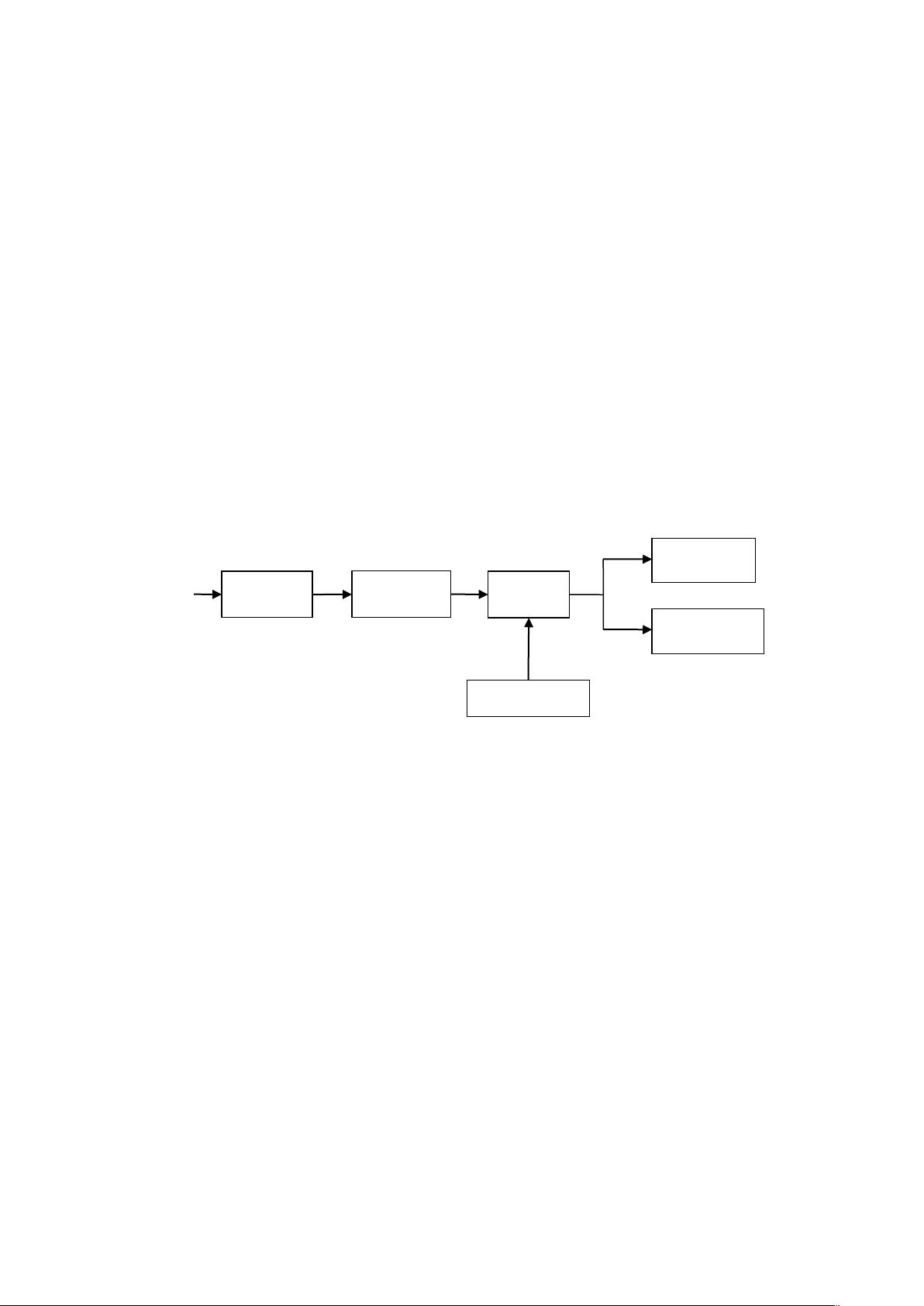
结构原理图如图 2-2 所示
图 2-2 交通灯的控制模块系统框图
2.4 方案论证
通过方案一和方案二的比较,方案一用单片机来实现虽然结构简单但使用的分立的
元件电路较多,电路的不稳定性会随之增加。利用单片机系统设计的交通灯控制器相对
来说较稳定,能够完成较多功能的实现,但这些控制方法的功能修改及调试都需要硬件
电路的支持,在一定程度上增加了功能修改及系统设计与调试的困难。
结合在现代交通压力大,为缓解交通压力因此交通灯必须反应快,稳定性好,在现
代系统芯片(System On Chip,SOC)技术的引领下,低故障、高实时、高稳定、体积小、
利用率大的系统已成为青睐的对象。
结合本课程设计是 EDA 课程设计并且综合以上比较的情况,我们选择基于 CPLD 的
交通灯控制电路方案。
时钟输入
计数分频
FPGA
LED 显示
数码管显示
程序控制模块
剩余26页未读,继续阅读
217 浏览量
2021-10-07 上传
2024-11-02 上传
2021-12-27 上传
2021-10-05 上传
2021-10-02 上传

老帽爬新坡
- 粉丝: 99
 我的内容管理
展开
我的内容管理
展开







最新资源
- Python爬虫新手入门与实战练习指南
- 自动生成readme文件的测试项目解析
- LeetCode算法题解集:Java与JavaScript的实战演练
- Rx.Http:在.NET Core实现异步HTTP请求的React式库
- McAfee 防病毒企业版安装与更新指南
- VC实现列表框Tip提示效果的源码解析
- BitfighterViewer:基于Lua API的实时游戏提要展示工具
- 金属知识基础指南及机械知识压缩包
- 2013版最新房贷计算器全面上线
- KUDAPACH_TODOLIST:简约而不失功能性的待办事项管理工具
- 基于FCM算法的图像分割matlab实现及核函数应用
- ChatWorkTemplate-crx:高效管理Chatwork模板插件
- 实现始终置顶的VC窗口源代码
- Next.js快速入门与部署指南
- asconsole: 浏览器控制台在Flash ActionScript调试中的应用
- 51单片机开发的智能计算器项目介绍
