GNSS软件接收机导航信号处理技术解析
"GNSS软件接收机导航信号处理是一本专注于全球导航卫星系统(Global Navigation Satellite System, GNSS)软件接收机中导航信号处理技术的专业书籍。作者Thomas Pany通过此书探讨了GNSS技术的最新发展和应用,特别是软件接收机在导航信号处理方面的核心概念和技术。"
该书详细介绍了GNSS系统的基础知识,包括GPS、GLONASS、Galileo和北斗等全球主要卫星导航系统的运行原理和信号结构。它深入讨论了软件接收机在捕获、跟踪和解码导航信号时的关键算法,这些算法是实现精确定位和时间同步的基础。书中的内容涵盖了以下关键知识点:
1. **GNSS系统概述**:解释了GNSS的基本工作原理,如伪随机噪声码(PRN)和多普勒频移,以及它们如何帮助接收机确定位置和时间。
2. **软件接收机的优势**:讨论了软件接收机相对于硬件接收机的灵活性、可扩展性和成本效益,特别是在研究和开发环境中的应用。
3. **信号处理**:详细阐述了信号的捕获和跟踪技术,包括快速傅里叶变换(FFT)、滑窗技术、自相关函数和匹配滤波器的应用。
4. **伪距和相位测量**:解释了如何利用伪距和载波相位测量进行高精度定位,以及与多路径效应和钟差校正相关的挑战。
5. **多模接收机**:探讨了同时支持多个GNSS系统(多模)的接收机设计,以提高可用性、可靠性和定位精度。
6. **MATLAB程序和汇编代码**:书中提到的配套资源提供了MATLAB程序和汇编代码示例,读者可以用来理解和实现书中的算法,这有助于理论知识与实践操作的结合。
7. **知识产权和标准**:虽然没有详细展开,但提到了书中涉及的所有商标和服务标志都已适当地进行了大写处理,暗示了对知识产权和行业标准的尊重。
这本书不仅适合GNSS领域的研究人员和工程师,也适用于高校相关专业师生,为他们提供了一个深入了解GNSS软件接收机导航信号处理的宝贵资源。通过阅读本书,读者将能够掌握导航信号处理的核心技术,并有能力开发和优化自己的软件接收机解决方案。
Preface xv
Chapter 4 points out that least-squares code, carrier, and Doppler estimation
is optimal under white and colored noise for arbitrary sample rates including sub-
Nyquist sampling. The least-squares scheme is affected by the squaring loss, but a
numerical evaluation of the true Cramér-Rao lower bound demonstrates that the
least-squares scheme is an optimal estimator. In fact, a correct treatment of the car-
rier phase as a uniformly distributed nuisance parameter shows that the squaring
loss is part of the code phase and the Doppler Cramér-Rao lower bound. Linear-
ity conditions are discussed that the proposed least-squares multipath-estimating
discriminator has to fulfill to be optimal. Techniques like macroscopic long coher-
ent integration times and vector tracking are pointed out to fulfill the linearity re-
quirements, even for weak signals. Nonparametric (i.e., multipath-mitigating) and
parametric (i.e., multipath-estimating) least-squares discriminators are detailed in
Chapter 8, making use of the different classes of correlators presented in Chapter 7.
An efficient software receiver implementation relies on extra- or interpolation of
correlator values, a technique that is also investigated from the parameter-estima-
tion point of view in Chapter 4. Signal preprocessing, including quantization and
sampling, is detailed in Chapter 6, as well as the handling of colored noise. The
theoretical basis for signal detection or acquisition is laid out in Chapter 5. Signal
acquisition is a computational-extensive task that is most efficiently done via FFT
methods in a software receiver. Those methods are described in Chapter 9 and are
related to time-domain correlation.
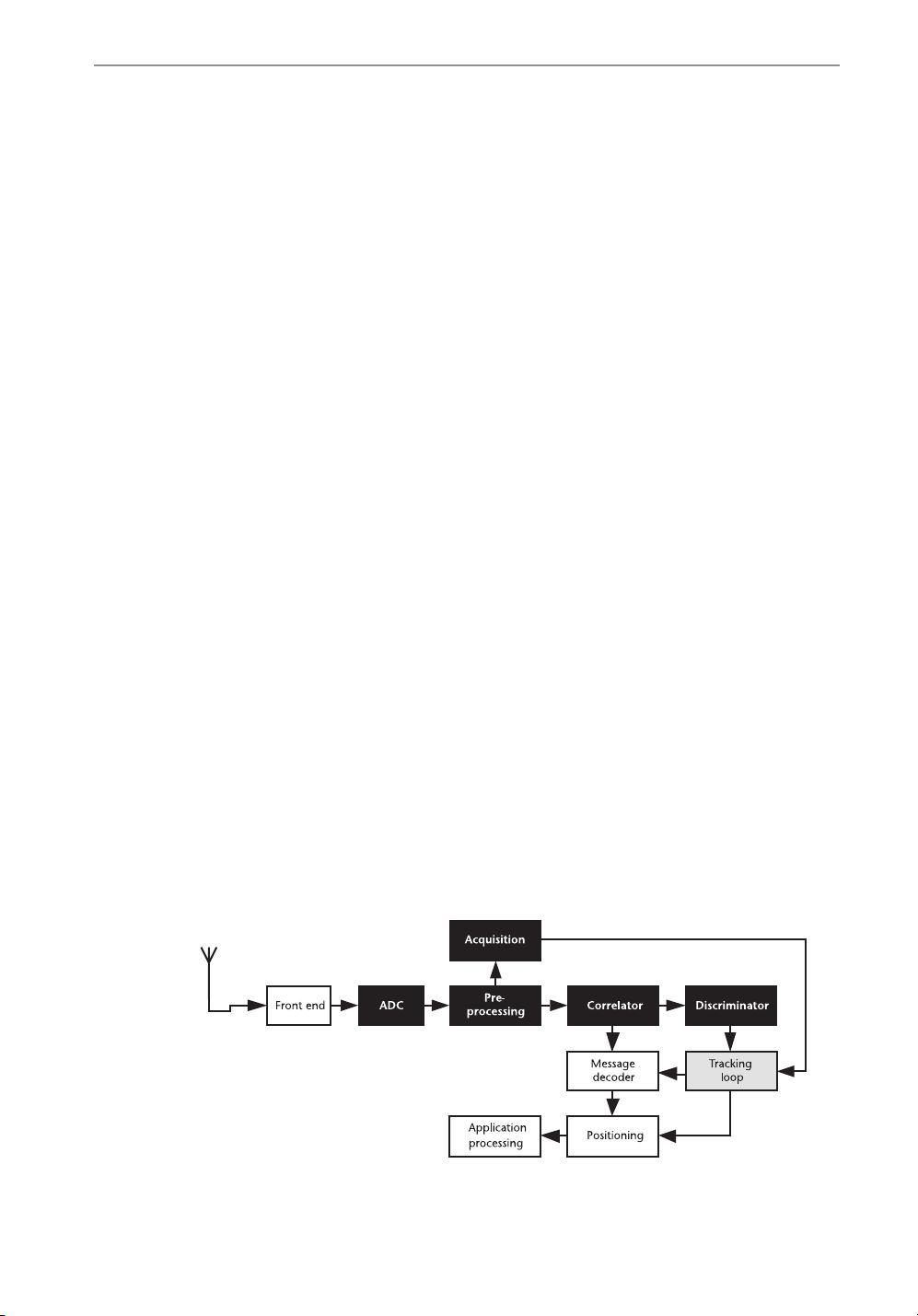
Overall, this book covers signal processing, starting from the ADC up to the
estimation of the code phase, the carrier phase, and Doppler as depicted in Figure
P.1. Tracking loops are covered with respect to their influence on the discriminators.
For other navigation receiver aspects, like message decoding or positioning, the
reader is referred to other literature. Also, some specific high-precision techniques
like semi-codeless tracking and pulse blanking are covered.
The software receiver core algorithms consuming most of the processing time
are covered in Chapter 9. A run-time performance analysis is presented, making use
of x86 assembly language code snippets. The reader can find those snippets in the
exemplary source code on the homepage for this book, http://www.artechhouse.-
Figure P.1 Covered navigation receiver topics: black—fully covered; gray—partly covered; white—
not covered.



剩余372页未读,继续阅读
相关推荐












