单片机驱动机器人入门:从基础LED点亮到舵机控制
版权申诉
191 浏览量
更新于2024-06-27
收藏 763KB DOCX 举报
本资源是一份关于机器人制作的实践指南,主要介绍了作者从兴趣出发,通过选择经济实惠的单片机方案来进行基础机器人项目的制作过程。首先,作者提到虽然现代电脑功能强大,但不具备直接采集外部物理数据或控制电机的能力,这促使他转向单片机技术的学习,因为单片机能够满足低成本且具备编程灵活性的需求。
在硬件方面,采购清单包括8位单片机Atmega168开发板,用于实现单片机的基础编程;电路面包板和连线,用于驱动车轮减速电机,这里选择了集成有减速齿轮的电机以简化设计;红外距离传感器作为主要传感器,扮演机器人的"眼睛",检测障碍物距离;以及舵机,用于控制机器人头部的运动,类似于遥控模型中的角度调整元件。
在软件开发阶段,作者从最基本的"Hello World"程序开始,即让单片机点亮LED,通过设置单片机的数字引脚输出高低电平来实现LED的开关。这一步旨在确认单片机的基本功能和通信能力。接着,作者解释了舵机的工作原理,它利用接收机的信号、调制芯片的直流偏置电压,以及内置的基准电路来实现精确的角度控制。
这个实验不仅涉及到硬件的选型和连接,还包含了编程技能的运用,如设置模式、数据输出等,这些都是机器人制作过程中不可或缺的部分。通过这样的步骤,读者可以逐步理解并掌握单片机在机器人制作中的核心作用,为后续更复杂的机器人设计打下坚实基础。整个项目旨在通过实践操作提升对电子硬件的理解,培养动手能力和编程思维。
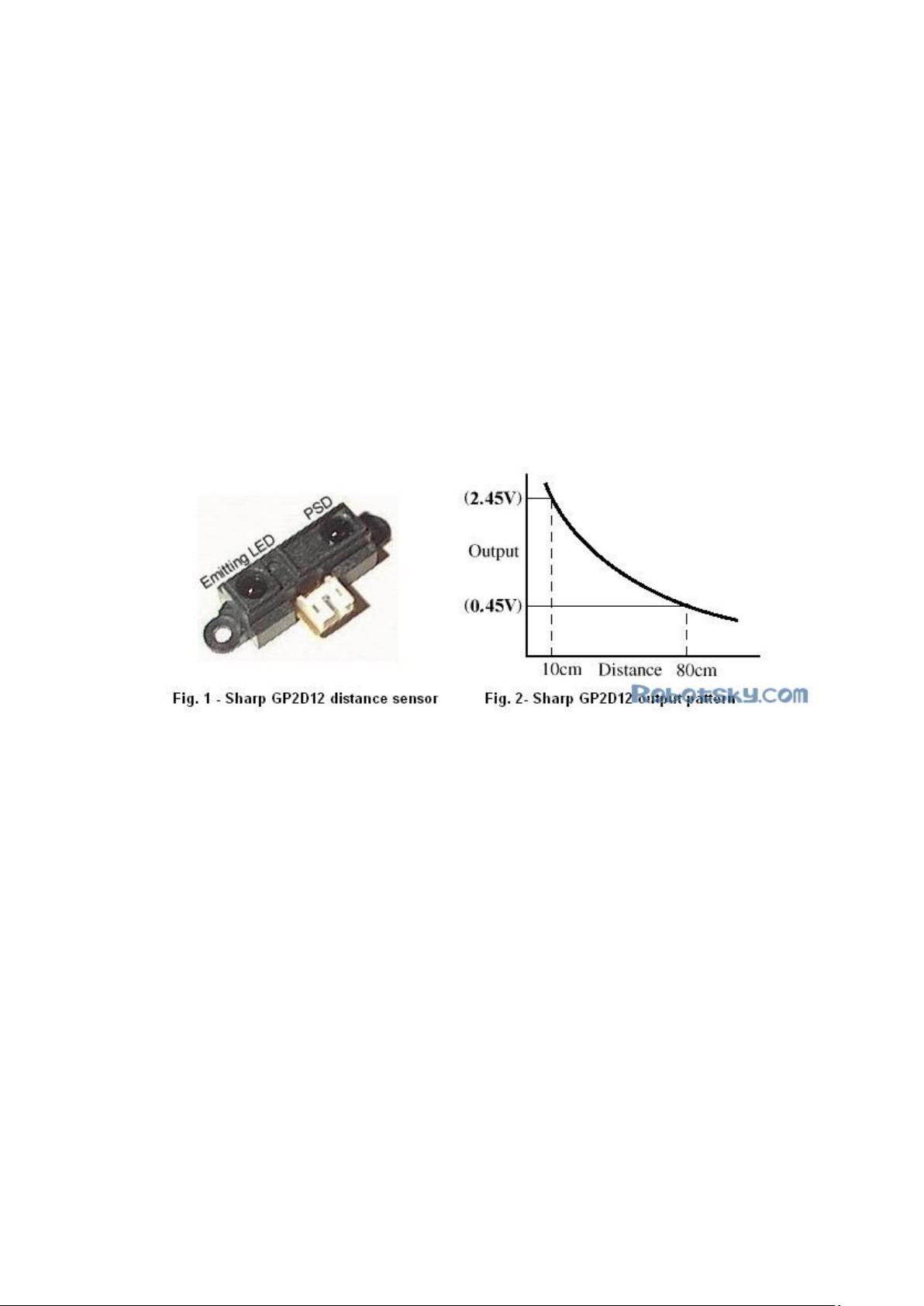
传感器介绍:
SHARP 红外距离传感器,用于模型或机器人制作,可以用来测量距离。每个模块
赠送一根 15cm 长 PH2.0 的单头排线 .
技术规格:
探测距离: 10-80cm
工作电压: 4-5.5V
标准电流消耗: 33-50 mA
输出量:模拟量输出,输出电压和探测距离成比例
接好电源,把模拟信号输出端接在单片机的模拟输入 Pin 就行了。
测试代码:
int potPin = 2;
int ledPin = 13;
int val = 0;
void setup() {
pinMode(ledPin, OUTPUT);
}
void loop() {
val = analogRead(potPin);
剩余26页未读,继续阅读
2022-06-30 上传
2023-03-07 上传
2022-11-03 上传
2023-03-07 上传
2023-02-16 上传
2022-02-15 上传
2023-07-12 上传

猫一样的女子245
- 粉丝: 228
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Aspose资源包:转PDF无水印学习工具
- Go语言控制台输入输出操作教程
- 红外遥控报警器原理及应用详解下载
- 控制卷筒纸侧面位置的先进装置技术解析
- 易语言加解密例程源码详解与实践
- SpringMVC客户管理系统:Hibernate与Bootstrap集成实践
- 深入理解JavaScript Set与WeakSet的使用
- 深入解析接收存储及发送装置的广播技术方法
- zyString模块1.0源码公开-易语言编程利器
- Android记分板UI设计:SimpleScoreboard的简洁与高效
- 量子网格列设置存储组件:开源解决方案
- 全面技术源码合集:CcVita Php Check v1.1
- 中军创易语言抢购软件:付款功能解析
- Python手动实现图像滤波教程
- MATLAB源代码实现基于DFT的量子传输分析
- 开源程序Hukoch.exe:简化食谱管理与导入功能
