




基于躁动多臂强盗过程的动态多通道感知方案
134 浏览量
更新于2024-08-26
收藏 911KB PDF 举报
一种动态多通道接入的新型感知方案
本文提出了一种基于躁动多臂强盗过程(RMBP)的动态多通道访问感知方案,以解决认知无线电系统中动态多信道访问的问题。该方案的主要挑战是保护主要用户权利的同时,充分利用有限的频段资源。
首先,RMBP 模型在传输周期和检测间隔之间具有灵活的比率,记为n。这使得 secondary users 能够根据 Whittle 的索引判断要感知的频道。然后,在拉格朗日松弛下,我们计算了吞吐量和传感成本,并证明了吞吐量在 n 接近无穷大时收敛到固定边界。同时,在某些情况下,传感成本被证明是不同的。
此外,我们还证明,无论系统性能如何提高,干扰百分比均保持不变。这意味着,基于 RMBP 的感知方案可以在实际应用中发挥重要作用。
在实际使用中,需要根据环境设置合适的参数。例如,在选择合适的 n 值时,需要考虑系统的性能和资源的限制。本文还提供了一个推荐的参数设置方法,以便在实际应用中获得最佳的感知性能。
在本文中,我们还讨论了 Markov chain 在认知无线电系统中的应用。Markov chain 是一种数学模型,用于描述随机过程的状态转移。通过使用 Markov chain,可以对认知无线电系统中的状态进行建模和分析。
本文提出了一种基于 RMBP 的动态多通道访问感知方案,并对其性能进行了理论分析和证明。该方案可以在实际应用中发挥重要作用,提高认知无线电系统的性能和效率。
知识点:
1. 动态多信道访问是认知无线电系统中最重要的问题之一。
2. RMBP 模型可以应用于动态多通道访问感知中,以解决频段资源的利用问题。
3. Whittle 的索引可以作为二级用户判断要感知的频道的标准。
4. 在拉格朗日松弛下,可以计算吞吐量和传感成本。
5. 吞吐量在 n 接近无穷大时收敛到固定边界。
6. 传感成本在某些情况下是不同的。
7. 干扰百分比保持不变,无论系统性能如何提高。
8. Markov chain 可以应用于认知无线电系统中的状态建模和分析。
210 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 61, NO. 1, JANUARY 2012
2) All the available channels are positively correlated,
2
i.e.,
p
11
>p
01
.
3) n is an integer value.
3
First, we assume that when n = 1, the transition time from
one state to another in the Markov chain is equal to T . Hereby,
the transition matrix corresponding to transmission time T is
p
00
p
01
p
10
p
11
=
p
(1)
00
p
(1)
01
p
(1)
10
p
(1)
11
.
If n>1, the transition time changes from T to T/n. Based
on assumption 1, the transition matrix corresponding to trans-
mission time T is given by
p
00
p
01
p
10
p
11
=
p
(n)
00
p
(n)
01
p
(n)
10
p
(n)
11
n
.
Accordingly, the determinant of the two matrices is equal,
which leads to
p
00
+ p
11
− 1 =
p
(n)
00
+ p
(n)
11
− 1
n
. (1)
The Markov model shown in Fig. 1 goes to stability, and
therefore, the local balance equation holds:
1 − p
00
1 − p
11
=
1 − p
(n)
00
1 − p
(n)
11
. (2)
In the condition that p
11
>p
01
(assumption 2), a more
simplified expression can be written as follows:
p
(n)
11
=
p
01
+(1 − p
11
)
n
√
p
11
− p
01
1 + p
01
− p
11
(3)
p
(n)
01
=
p
01
(1 −
n
√
p
11
− p
01
)
1 + p
01
− p
11
. (4)
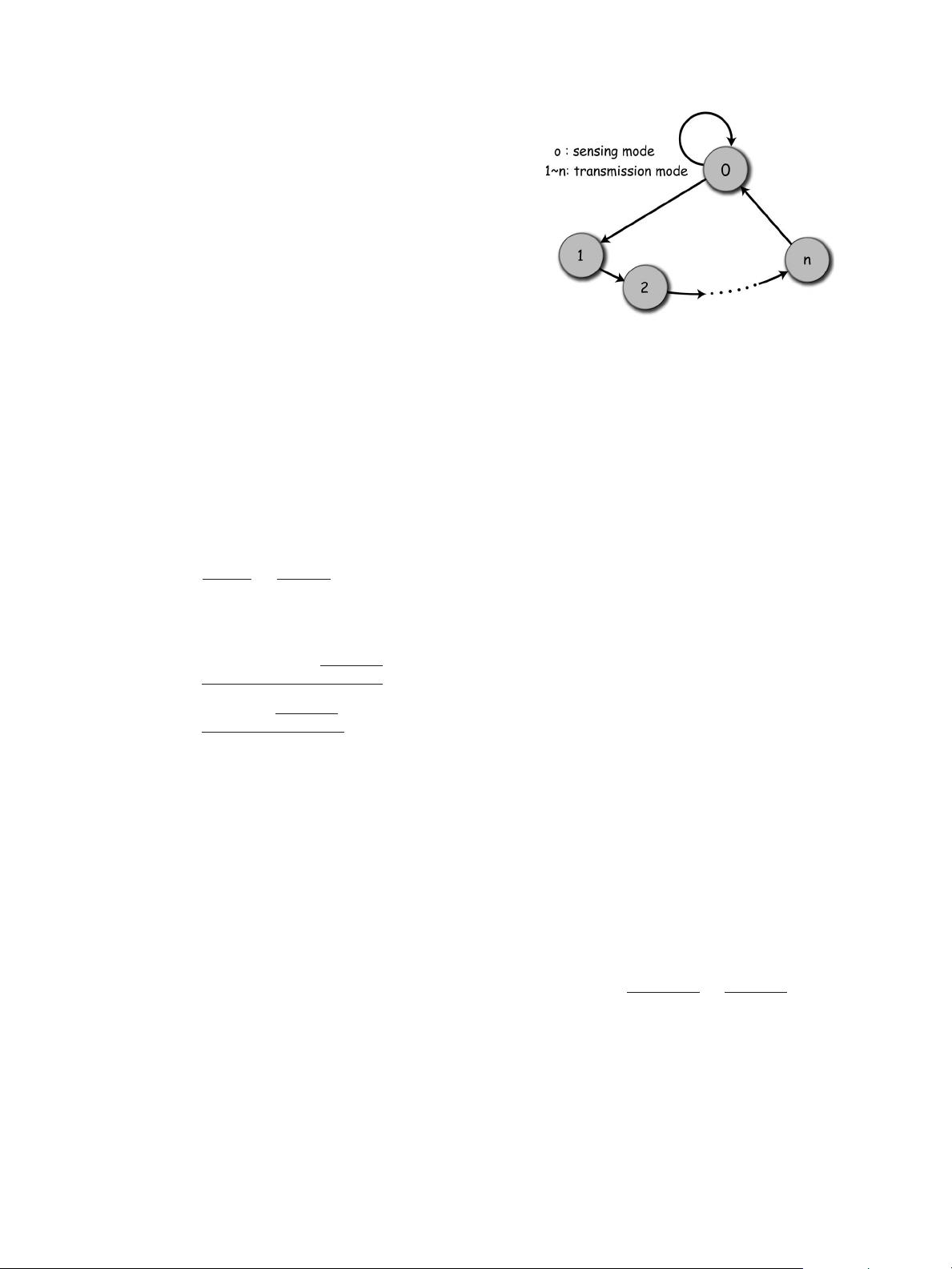
B. Device Mode Transition Circle
As the channel model is put forward, we then propose a
corresponding device activity model, i.e., the device mode
transition circle, as shown in Fig. 2.
We define S(t) as the mode of device within each time slot
T/n, where S(t) ∈{0, 1, 2,...,n}. S(t)=0 denotes that the
device is performing spectrum sensing within sensing interval.
S(t)=1 denotes that the device is performing the first slot
transmission within transmission period. S(t)=n denotes that
the device is performing the nth slot transmission within the
transmission period.
The exact model is expressed as follows.
An SU is supposed to have K devices for multichannel sens-
ing and transmitting. Each device is responsible for sensing and
transmitting on a subchannel within the entire spectrum, which
is equal to the spectrum supported by the hardware capability
2
When p
11
>p
01
, two consecutive slots tend to have the same “good” or
“bad” state, which is defined as positively correlated. Similarly, When p
11
<
p
01
, two consecutive slots tend to have the different “good” or “bad” state,
which is defined as negatively correlated. When p
11
= p
01
, two consecutive
slots tend to have independent state.
3
This will be explained later in this part.
Fig. 2. Device mode transition circle.
on an SU. The summation of spectrum on K subchannels is
equal to the entire spectrum. The criterion of mapping the
entire spectrum into K subchannels is not specified in this
paper. For simplicity, we use channels instead of subchannels
in the following sections. Each of these K devices may only
be in one of two modes: 1) sensing mode and 2) transmission
mode. During sensing mode, each device chooses one of N
channels to sense. It then immediately turns into transmission
mode, which lasts for a transmission period if the channel
is “good.” Otherwise, it rechooses a channel to sense after a
sensing interval.
The SU is supposed to infer the future channel states from
its history of decision and observation. Define ω(t) as a belief
state [2], which represents a sufficient statistic for optimal
decision making. The belief state is obtained as the conditional
probability that the channel state is “1,” given all past decisions
and observations. Thus, we can obtain the belief state in time
slot t + 1 recursively, i.e.,
ω(t + 1)=
p
(n)
01
,S(t)=0
p
(n)
11
,S(t)=n
T (ω(t)), not sensed
where
T (ω(t))
∆
= ω(t)p
(n)
11
+(1 − ω(t)) p
(n)
01
(5)
is the one-step belief update for unobserved channels. The
i-step belief update for unobserved channels can simply be
represented by the iterative form of (5), which is formulated
as T
i
(ω(t)).
There is a stationary point ω
0
of the Markov chain
ω
0
=
p
(n)
01
p
(n)
10
+ p
(n)
01
=
p
01
p
01
+ p
10
.
Based on this model, the long-run r eward based on the benefit
of data transmission and the penalty from sensing cost will be
discussed in t he following sections.
C. Discussion About n
From the description about the model, we can see that an
obvious limitation is that n is an integer value. This is due to
the consideration for model simplification as well as practi-
cal use.
下载后可阅读完整内容,剩余13页未读,立即下载
2021-09-20 上传
191 浏览量
2022-11-03 上传
182 浏览量
250 浏览量
165 浏览量
118 浏览量
208 浏览量
209 浏览量

weixin_38589795
- 粉丝: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- Python实现ID3算法:数据预测与Web应用部署
- 国产skinh_net控件:VC与C#跨平台界面开发
- 越野车销售专业网页模板介绍
- 全面的HMM工具箱:Matlab程序分享
- Android APK+Dex文件反编译与回编译新工具特性介绍
- Verilog实现的Cordic算法与测试平台
- 为健康家庭定制的生活网站模板介绍
- 运动目标检测技术:高斯模型等典型论文汇总
- 探索GridView多选择功能与背景色处理
- 全面的Spring框架jar包集合下载
- 快速上手GraphQL:结合Express JS和Apollo Server 2.0
- 高效便捷的驱动防火墙终结者使用体验
- 欧美风格高端房产网站模板设计
- Delphi中文QR二维码生成控件ZIntQRCode
- 电子工程师必备:传输线阻抗计算器使用指南
- Java在线商品展示系统快速开发实践






















