KUKA机器人基础教程:从系统概述到用户编程
版权申诉
62 浏览量
更新于2024-07-02
收藏 4.2MB PPT 举报
"这份资源是关于KUKA机器人的基础介绍,内容涵盖KUKA机器人的应用、系统结构、驱动方案以及用户编程等方面。"
KUKA机器人是全球知名的工业机器人制造商,其产品广泛应用于各个领域,如焊接、点焊、MIG焊、TOX焊、螺柱焊和激光焊等。在工业自动化中,KUKA机器人以其高精度、高效率和灵活的特性备受青睐。
在KUKA机器人的系统概述中,首先提到了机器人本体,这是机器人的物理结构部分,包括机械臂、关节和末端执行器等。机器人驱动方案是KUKA机器人技术的核心,它涉及到了奔腾处理器,这种高性能的处理器能够高效地处理机器人的运动控制指令。驱动模块也是驱动方案的一部分,用于实现机器人的精确动作。
KUKA-VGA卡、MFC卡和DSE卡是机器人控制系统的关键组件。KUKA-VGA卡负责图形显示,提供用户友好的界面;MFC卡作为多功能卡,处理多种功能需求;DSE卡(数字式伺服电子电路)则用于伺服电机的控制,确保机器人动作的精确和稳定。旋转变压器数字转换器(RDW)用于检测和转换机器人关节的位置信息,而KUKA控制屏(KCP)是人机交互的主要界面,包含键盘、空间鼠标和以太网接口,方便用户输入指令和监控机器人状态。
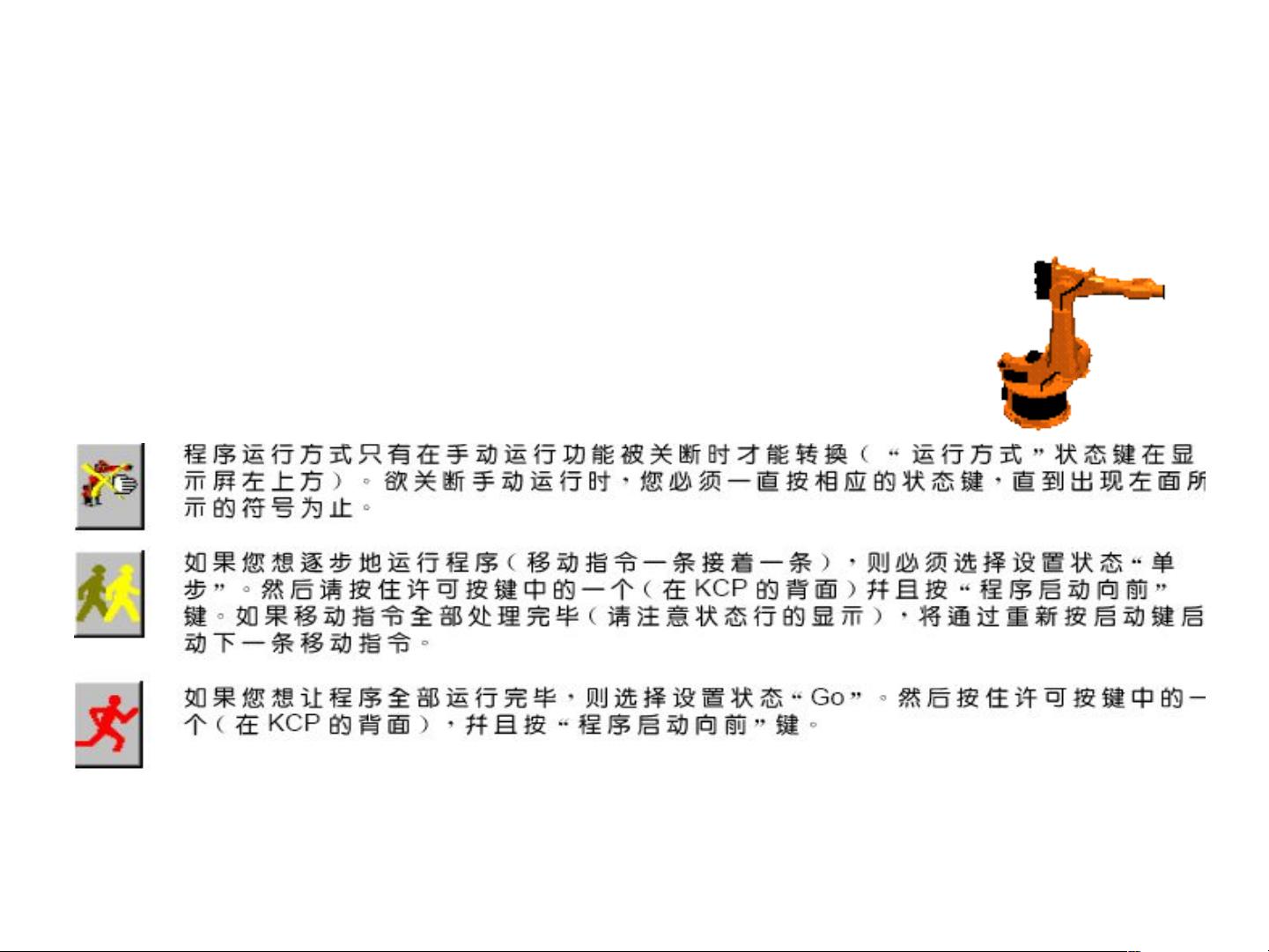
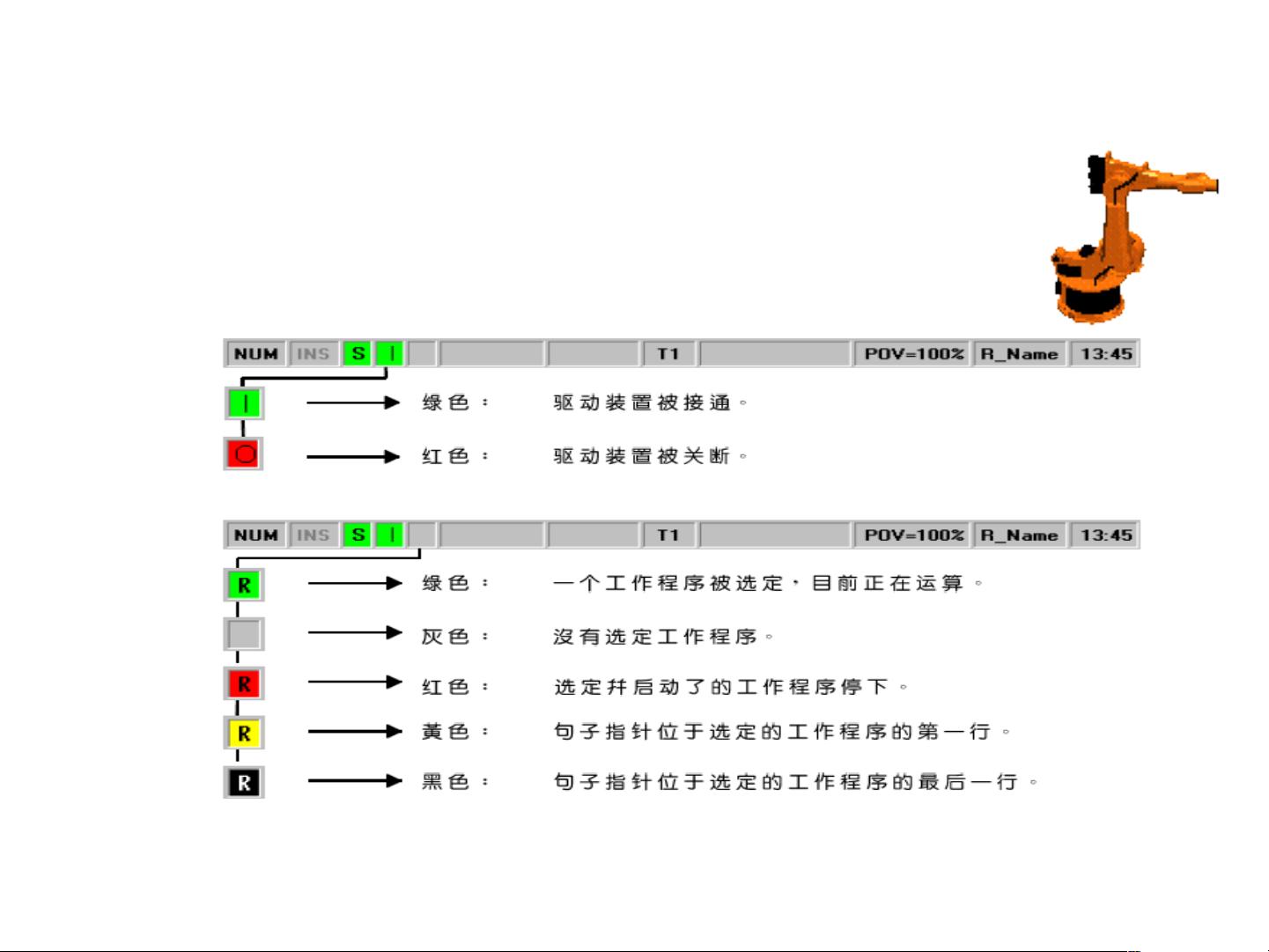
在用户编程部分,介绍了KUKA机器人操作屏的各种功能,如状态键和程序运行方式。用户可以单步执行程序或选择连续运行(GO)。状态条显示了机器人的当前工作状态,包括坐标系信息。KUKA机器人支持多种类型的程序,如FOLGE、UP、MACRO等,其中主程序通常包含了PTP(点到点)运动指令,如PTPVB用于指定速度百分比,VE设置加速度,ACC设定减速时间,Wzg定义工作区,SPSTrig控制触发模式,而FBONL则可能与功能块有关。
这份资料详细介绍了KUKA机器人系统的基础知识,对于理解和操作KUKA机器人具有很高的参考价值,涵盖了从硬件结构到软件编程的全面内容,是学习和使用KUKA机器人的基础教程。

995 浏览量
2021-10-01 上传
2024-05-30 上传
2021-10-02 上传
2021-10-02 上传
2021-10-02 上传
2021-10-07 上传
2022-01-23 上传

智慧安全方案
- 粉丝: 3845
- 资源: 59万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- cra-ts-prettier-commitlint-template:CRA模板,具有更漂亮,更沙哑,更出色的提交以及更多现成的设置
- portfolio-template:Jekyll产品组合网站模板,以使用GitHub Pages展示您的工作
- 供应链管理中的库存控制
- jsonviewerpackage.zip
- johnroids:Johnroids是在go,gopherjs和gowasm中实现的旧式小行星游戏
- localSolver:本地求解器的文件。 云托管代码不需要这些
- 供应链管理 供应链管理思想产生
- XCTAssertCrash:使用Mach异常处理程序或POSIX信号处理程序断言表达式崩溃
- kutik
- 47元手把手教你:图像识别的垃圾分类系统.rar
- gp_project:使用遗传编程找到多项式函数
- qrcode_scanner::hammer_and_wrench:Flutter QR码扫描仪插件
- 美赛各题型常见参考代码汇总.zip
- 供应链下的后勤管理
- 7Bot-Arduino-lib:这是7Bot的Arduino库
- 5.9【阿里云天池】零基础入门数据价格:二手车交易价格预测 car-price-forecast-master.zip
