"基于双延迟深度确定性策略梯度的船舶自主避碰方法研究"
版权申诉
10 浏览量
更新于2024-03-09
收藏 708KB DOCX 举报
基于双延迟深度确定性策略梯度的船舶自主避碰方法是船舶智能化发展面临的关键科学问题的研究之一。随着航运业的智能化发展已成为未来发展的必然趋势,各国学者对自主避碰技术进行了深入研究。在此背景下,引入了双延迟深度确定性策略梯度的方法,以解决传统方法在大角度避让要求下存在的局限性。
船舶作为水路运输的主体,是国家综合立体交通网的重要构成要素,其智能化已成为了水运发展的必然趋势。《全球海洋技术趋势 2030》《智能航运发展指导意见》《中国制造 2025》等文件已明确指出:智能船舶是未来重要科技创新的新领域,人工智能、现代信息等高科技技术应用于航运业也是未来发展的必然趋势。自主避碰技术是船舶智能化发展面临的关键科学问题,其研究受到各国学者的关注。
Lyu 等通过将本船周围划分为 4 个区域,并在每个区域设置不同的斥力势场函数,实现在多物标场景下及来船不协调行动时的安全避碰,但该方法航向变化波动较大,在部分场景下不满足大角度避让的要求。黄立文等则通过分析船舶会遇过程,结合船舶领域量化碰撞危险,并运用速度障碍法求解船舶在特定会遇态势下的动态避碰操纵区间,但是该方法假定 1 次避让行动就能让清所有船舶,没有对整个避碰过程求解操纵区间。丁志国等则利用模糊理论评估船舶碰撞危险,结合《1972 年国际海上避碰规则》,但该方法在实际应用中存在着一定的局限性。
针对传统方法存在的局限性,本研究引入了双延迟深度确定性策略梯度的方法,以提高船舶自主避碰技术的效率和准确性。该方法结合了深度学习和策略梯度方法,能够对船舶避碰过程中的不确定性进行有效建模和处理。通过强化学习的方式,船舶可以在不同的会遇态势下学习并优化避碰策略,以实现更安全和高效的避碰行为。
在实际应用中,基于双延迟深度确定性策略梯度的船舶自主避碰方法为船舶智能化发展提供了重要的技术支持。该方法不仅可以应对多物标场景和来船不协调行动的情况,还能够满足大角度避让的要求,并且能够对整个避碰过程进行有效的求解操纵区间。此外,双延迟深度确定性策略梯度的方法还能够评估船舶碰撞危险,并结合国际海上避碰规则,为船舶避碰过程提供科学的决策支持。
总之,基于双延迟深度确定性策略梯度的船舶自主避碰方法在船舶智能化发展中具有重要的意义。该方法不仅克服了传统方法存在的局限性,还为船舶自主避碰技术的研究和应用提供了新的思路和方法。随着船舶智能化发展的推进,双延迟深度确定性策略梯度的方法将在实际航运中发挥越来越重要的作用。
判定船舶在航行过程中是否存在碰撞危险
[2]
,首先设定以 d
c
为半径的碰撞危险监测范
围圆,避碰模型会忽略监测范围以外的来船,然后设定船舶之间的安全距离 d
s
,见图 3。
碰撞危险监测范围半径 d
c
和安全距离 d
s
可根据海况与会遇场景复杂程度进行适当调整,在
宽阔水域,会遇场景简单等条件下更大,较大的 d
c
与 d
s
意味着船舶会尽早采取更大幅度的
避碰行动。
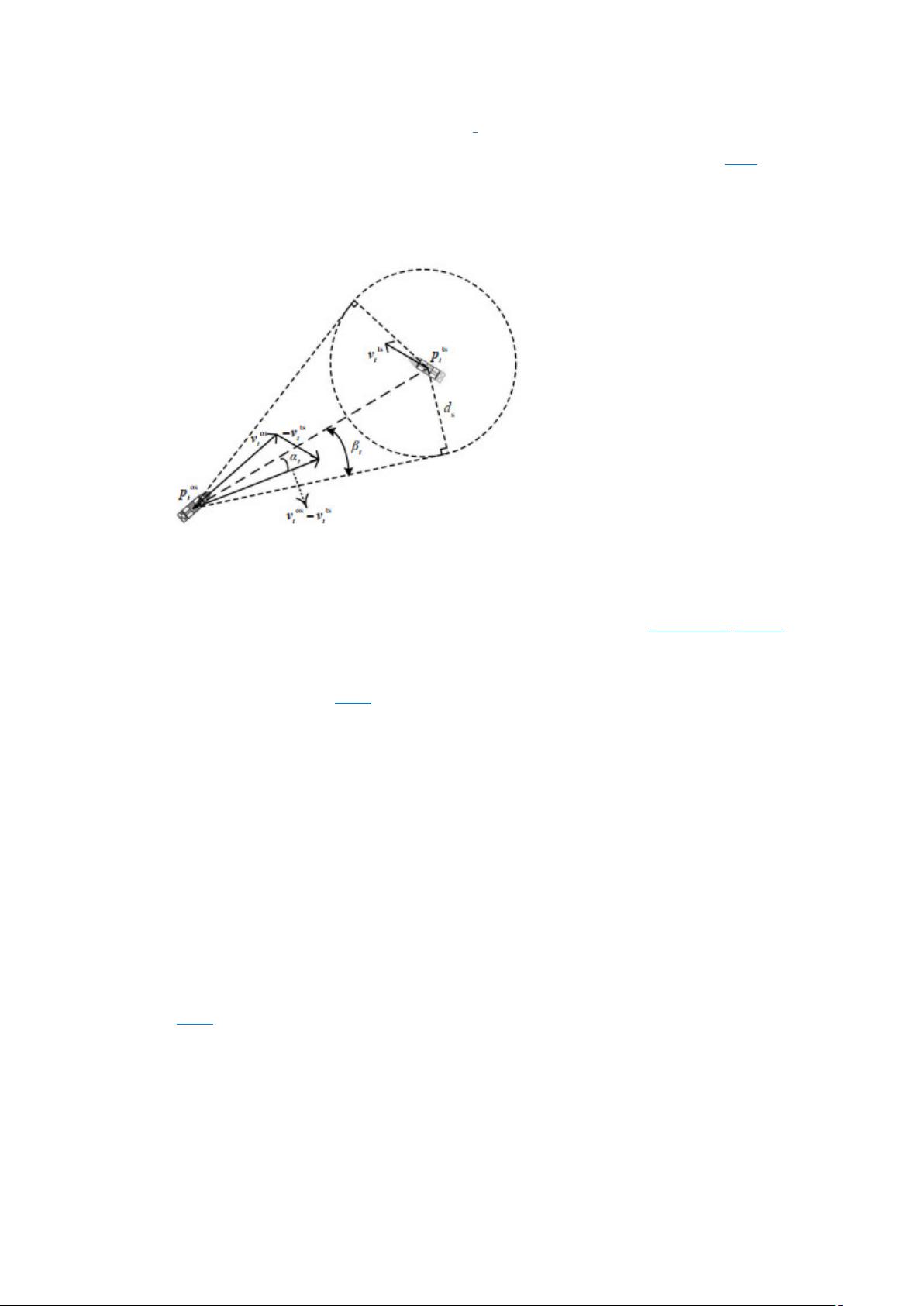
图 3 碰撞危险判断示意图
Figure 3. Collision risk judgment diagram
下载: 全尺寸图片 幻灯片
当来船进入监测范围时,依据本船与目标船的和速度延长线是否穿越半径为 d
s
的圆来
判断是否具有碰撞危险。如图 3 所示,在 t 时刻,从本船位置坐标 p
t
os
到半径为 d
s
的船舶
安全距离圆绘制 2 条切线,β
t
定义为任 1 条切线与相对位置矢量 p
t
ot
(即 p
t
ts
- p
t
os
)之间的角
度,见式(5)。
βt=arctan⎛⎝⎜ds∥post−ptst∥−d2s−−−−−−−−−−−−−√⎞⎠⎟βt=arctan(ds‖ptos−ptts‖−ds2)
(5)
式中:‖·‖表示取模长;p
t
os
为 t 时刻本船的位置坐标;p
t
ts
为 t 时刻目标船的位置坐标。
另外,当 2 船之间距离小于安全距离时,β
t
无法用式(5)计算。为此,在训练时,
为了能让神经网络学到目标船不应进入本船的安全距离范围内这一策略,在训练过程中当
本船与目标船的距离小于安全距离时认定为存在碰撞危险,设置 β
t
= π。但是在船舶避碰实
际应用中,当本船与目标船的距离小于安全距离且本船已经驶过 DCPA 点时,船舶间不存
在碰撞危险,因此在避碰算法应用时设置 β
t
= π/2。
图 3 中 α
t
是相对位置矢量 p
t
ot
与相对速度矢量 v
t
to
(即 v
t
os
- v
t
ts
)之间的夹角。当 α
t
< β
t
时,即表明与目标船存在碰撞危险,船舶应当采取避碰行动。具体来说,当船舶间距离大
于安全距离时,若 v
t
to
的延长线穿过半径为 d
s
的圆则表明存在碰撞危险。当本船与目标船
的距离小于安全距离 d
s
时,在算法训练过程认为存在碰撞危险,并采取更大幅度的避碰行
动。但在实际应用中,还需通过判断本船是否已经驶过 DCPA 点,即 α
t
是否大于 π/2 来确
定是否存在碰撞危险,若大于 π/2 则表明碰撞危险已经消失。
剩余24页未读,继续阅读
2022-05-29 上传
2022-12-15 上传
2022-06-26 上传

罗伯特之技术屋
- 粉丝: 4438
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 平尾装配工作平台运输支撑系统设计与应用
- MAX-MIN Ant System:用MATLAB解决旅行商问题
- Flutter状态管理新秀:sealed_flutter_bloc包整合seal_unions
- Pong²开源游戏:双人对战图形化的经典竞技体验
- jQuery spriteAnimator插件:创建精灵动画的利器
- 广播媒体对象传输方法与设备的技术分析
- MATLAB HDF5数据提取工具:深层结构化数据处理
- 适用于arm64的Valgrind交叉编译包发布
- 基于canvas和Java后端的小程序“飞翔的小鸟”完整示例
- 全面升级STM32F7 Discovery LCD BSP驱动程序
- React Router v4 入门教程与示例代码解析
- 下载OpenCV各版本安装包,全面覆盖2.4至4.5
- 手写笔画分割技术的新突破:智能分割方法与装置
- 基于Koplowitz & Bruckstein算法的MATLAB周长估计方法
- Modbus4j-3.0.3版本免费下载指南
- PoqetPresenter:Sharp Zaurus上的开源OpenOffice演示查看器
