移动RFID阅读性能实验:理想与现实的差距
164 浏览量
更新于2024-08-26
收藏 1.18MB PDF 举报
"这篇研究论文深入探讨了理想与现实之间的差距,专注于在RFID系统中使用移动阅读器进行连续扫描的实验研究。通过大量的实验数据,作者揭示了RFID标签读取性能的各种因素,并构建了一个模型来描述这些参数如何影响读取性能。基于此模型,他们设计出高效的算法,通过调整阅读器的功率和移动速度来优化时间效率和能源效率。实验结果显示,这些算法能将总的扫描时间减少50%,能源消耗降低83%相对于现有的解决方案。关键词包括RFID、模型、实际环境设置、连续扫描、算法设计和优化。"
本文主要关注的是移动RFID阅读器在实际应用中的性能,特别是在图书馆书籍扫描、商品追踪等场景中的应用。RFID(无线频率识别)技术因其非接触式自动识别能力而被广泛采用,但移动阅读器的性能和效率仍然是一个挑战。研究者通过大量实验收集数据,分析了影响RFID标签读取的关键参数,如阅读器功率、移动速度以及环境干扰等。
首先,他们观察并记录了不同条件下RFID标签的读取效果,这些条件可能包括标签的数量、分布、阅读器的移动路径以及读取距离等。这些观察结果帮助他们构建了一个详尽的模型,该模型能够描绘出这些参数如何综合影响阅读效率。
基于这个模型,研究者设计了一系列算法,目标是通过动态调整阅读器的功率输出和移动速度,最大化扫描效率和能源效率。这些算法旨在在确保高读取率的同时,减少不必要的能源消耗,从而提高整体系统性能。
实验结果证实了这些算法的有效性。与现有方法相比,它们能够显著减少总的扫描时间,降低了50%,同时减少了83%的总能耗。这表明,在实际应用中,通过优化策略可以显著提升移动RFID系统的性能,降低运营成本,进一步推动RFID技术在各种领域的广泛应用。
这项研究对于理解和改进移动RFID系统的性能具有重要意义,对于图书馆自动化、物流追踪、库存管理等依赖RFID技术的行业提供了重要的理论支持和实践指导。未来的研究可能会进一步扩展到更复杂的环境和更多的变量,以开发出更为智能和自适应的RFID读取策略。
efficiently set the parameters p
w
and v such that the follow-
ing objectives can be achieved:
Time-efficiency:
minimize T (1)
subject to
E a energy constraint
(2)
Pr½C ub coverage constraint (3)
8t
j
2 Sp
j
¼ p coverage constraint (4)
Energy-efficiency:
minimize E (5)
subject to
T g time constraint
(6)
Pr½C ub coverage constraint (7)
8t
j
2 Sp
j
¼ p coverage constraint: (8)
According to the above formulation, in regard to the
time-efficiency, the objective is to minimize the overall
scanning time T while the energy constraint and the cover-
age constraint should be satisfied. T he energy constrai nt
requires the energy used should be no greater than a certain
threshold a. In regard to the coverage constraint, due to the
random factors in the anti-collision scheme and the com-
munication envi ron ment, the coverage rati o C cannot guar-
antee to be deterministically equal or greater than a
threshold u, hence we use the probabilistic approach to
denote the requirement. The probability for the coverage
ratio C to be equal or greater than u should be no less than
b. Moreover, there co uld exist mul ti ple f e asible sol ut ions to
guarantee the coverage constraint, in some of the solutions
the tags are detected with nonuniform probabilities. In fair-
ness, we require that each tag t
j
in the set S should be
detected with a uniform probability p, i.e., the detection
probability p
j
should be equal to p. Similarly, in regard to
the energy-efficiency, the objective is to minim iz e the over-
all energy E,whilethetimeconstraintandthecoverage
constraint should be satisfied. The time constraint requires
that the scanning t ime should be no greater than a certain
threshold, g.
4DERIVING A MODEL FROM REALISTIC
EXPERIMENTS
In order to understand how the reader’s power and tag den-
sity affect the reading performance, while dealing with
issues like the path loss, energy absorption, and mutual
interference, we illustrate several original findings from our
realistic experiments. In our experiments, we use the Alien-
9900 reader and Alien-9611 linear antenna with a directional
gain of 6 dB. The 3 dB beamwidth is 40 degrees. The RFID
tags used are Alien 9640 general-purpose tags which sup-
port the EPC C1G2 standards. We attach the RFID tags onto
the books which are placed in a large bookshelf. Each tag is
attached onto a distinct book with a unique ID. The
bookshelf is composed of 16 grids with four columns and
four rows, the height and width of each grid are respec-
tively 60 cm and 75 cm. In the experiments we only consider
the grids in the three rows of upper layers, since the grids in
the bottom layer may be greatly affected by the multi-path
effect. Therefore, we choose to deploy the tags in the 12 grids
with four columns and three rows. The RFID reader is stati-
cally deployed by facing its antenna towards the book shelf.
Note that in order to set an appropriate value for the dis-
tance between the reader and the bookshelf, it is difficult to
directly derive the optimal distance from geometry accord-
ing to the beamwidth, due to issues like the multi-path
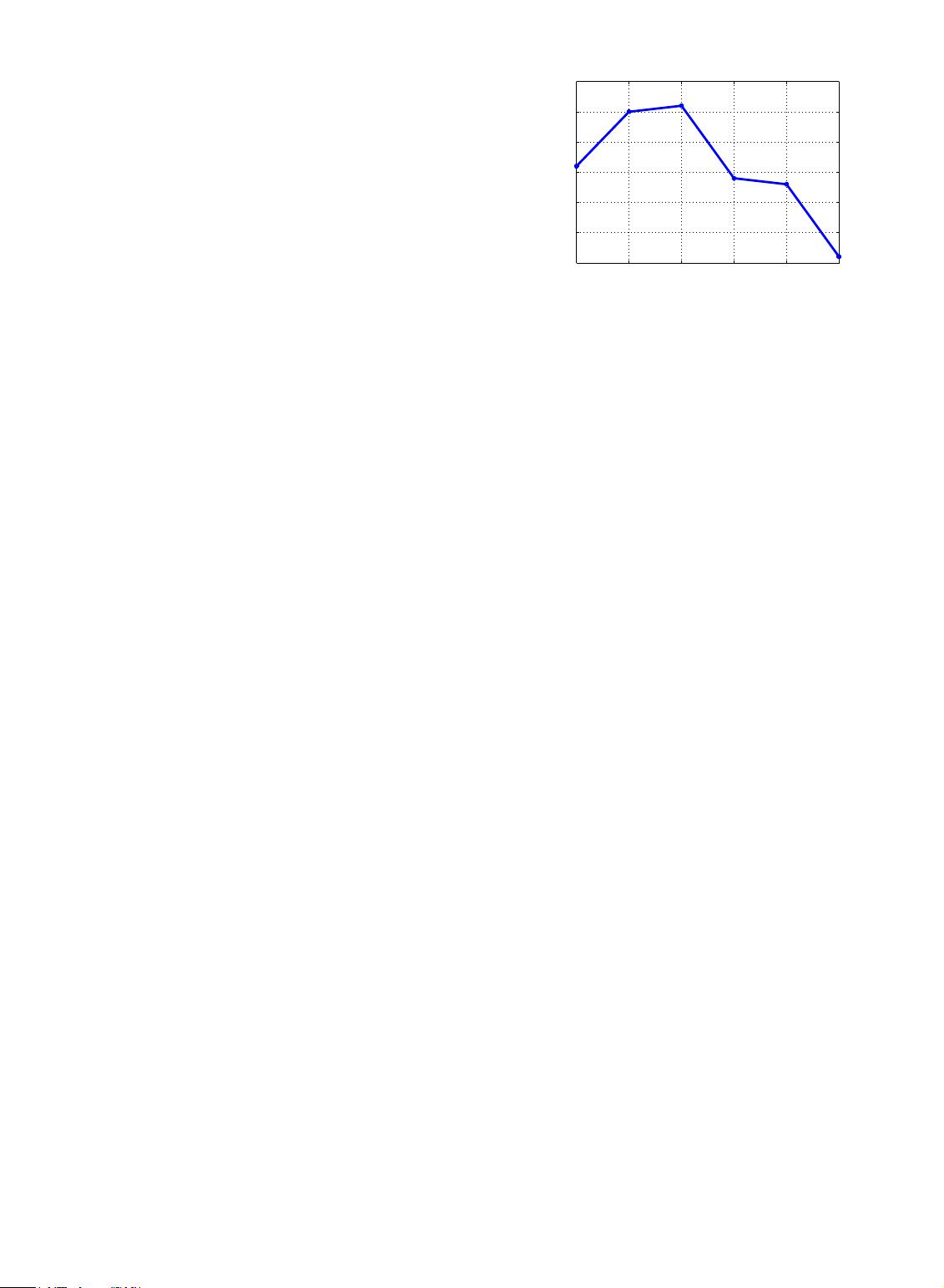
effect. Therefore, we vary the distance from 0.5 to 3 m and
measure the number of effectively identified tags while
scanning 160 tags uniformly distributed on the shelf.
As shown in Fig. 1, we find that the reader achieves the
maximum coverage when the distance is 1.5 m. Thus, we
set the distance to 1.5 m to guarantee the reading perfor-
mance. This setting is close to a typical noisy condition,
which is distinct from the free space condition, since the
issues in the realistic applications like the path loss, multi-
path effect and energy absorption all exist. Considering that
we deploy a relatively large number of tags (up to 160 tags
in experimental study and 480 tags in performance evalua-
tion) and a rather high tag density (up to 90 tags per square
meter) in realistic settings, the experimental findings from
the high tag density deployment can be highly scalable and
generalized to rather large scale settings. Specifically, we
attach each tag to a book and put these books back-to-back
in a very dense approach. We believe this tag density (up to
90 tags per m
2
) should be close to extreme case in scale for
conventional RFID applications. Since we use the mobile
RFID reader to scan the tags within its limited scanning
range, hence, after the whole process of continuous scan-
ning, all tags can be effectively identified. Therefore, as long
as we can tackle the problem in this situation, it can be
guaranteed that our solution is scalable to any large scale
during the continuous scanning.
On the whole, it took us over 300 hours to conduct an
extensive experimental study of up to 160 tags in realistic
settings. In order to sufficiently understand how the param-
eters separately/jointly affect the actual reading perfor-
mance, we conduct up to 100 various experiments, carrying
out lots of experimental comparisons and analysis on
the obtained results. In the following experiments, we
vary the tag density, r, from 10 to 40 tags/grid, while
adjusting the reader’s power from 20.7 dBm to 30.7 dBm for
0.5 1 1.5 2 2.5 3
20
30
40
50
60
70
80
Distance(m)
Effective tag size
Fig. 1. The number of tags read for various distances.
2274 IEEE TRANSACTIONS ON MOBILE COMPUTING, VOL. 14, NO. 11, NOVEMBER 2015
剩余13页未读,继续阅读
2011-11-29 上传
2011-12-08 上传
2021-04-08 上传
2020-10-23 上传
2021-03-23 上传
2021-03-30 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情

weixin_38680506
- 粉丝: 4
- 资源: 927
 我的内容管理
展开
我的内容管理
展开







最新资源
- 黑板风格计算机毕业答辩PPT模板下载
- CodeSandbox实现ListView快速创建指南
- Node.js脚本实现WXR文件到Postgres数据库帖子导入
- 清新简约创意三角毕业论文答辩PPT模板
- DISCORD-JS-CRUD:提升 Discord 机器人开发体验
- Node.js v4.3.2版本Linux ARM64平台运行时环境发布
- SQLight:C++11编写的轻量级MySQL客户端
- 计算机专业毕业论文答辩PPT模板
- Wireshark网络抓包工具的使用与数据包解析
- Wild Match Map: JavaScript中实现通配符映射与事件绑定
- 毕业答辩利器:蝶恋花毕业设计PPT模板
- Node.js深度解析:高性能Web服务器与实时应用构建
- 掌握深度图技术:游戏开发中的绚丽应用案例
- Dart语言的HTTP扩展包功能详解
- MoonMaker: 投资组合加固神器,助力$GME投资者登月
- 计算机毕业设计答辩PPT模板下载
