锐米LoRa终端评估DEMO板软件系统设计详解
版权申诉
131 浏览量
更新于2024-08-04
收藏 555KB PDF 举报
"锐米LoRa终端评估DEMO板的软件系统设计主要涵盖了软件开发环境、Demo系统逻辑、UART驱动时序、UART通信帧解析算法以及代码工程的组成。"
在物联网领域,LoRa(Long Range)技术因其远距离、低功耗的特点被广泛应用于无线通信网络中。锐米LoRa终端评估DEMO板是一款专为从事LoRa网络相关技术的人员设计的开发工具。这份文档详细介绍了DEMO板的软件系统设计,以帮助技术人员更好地理解和开发基于LoRa的解决方案。
1. 软件开发环境:
开发过程中使用的是ASNIC编程语言,集成开发环境(IDE)选择了IAR for STM8。由于目标是简化系统并降低复杂度,所以并未使用操作系统,而是基于一个简单的软件结构——无限循环(while(1))运行。在无任务执行时,系统会进入低功耗模式(WFI:Wait For Interrupt),等待中断事件的发生。
2. Demo系统逻辑:
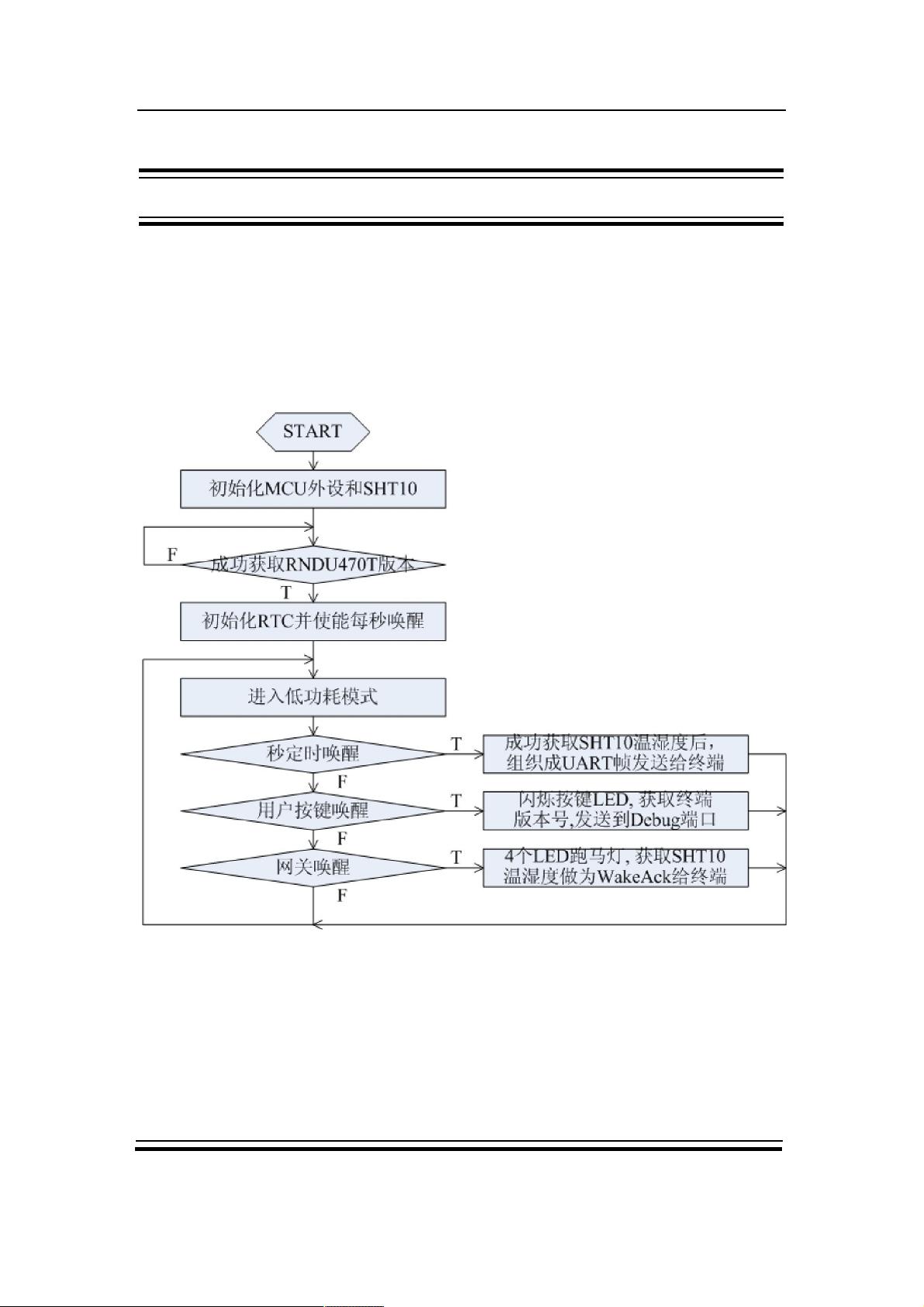
主程序逻辑清晰,由一个简单的无限循环构成。系统在空闲时进入低功耗模式,当有秒定时、用户按键或网关通信事件发生时,系统会相应地进行处理。实际测试显示,采集SHT10传感器的12位湿度大约需要62毫秒,而采集14位温度则需要约216毫秒。
3. UART驱动时序:
RNDU470T作为超低功耗产品,大部分时间处于休眠状态。为了发送UART数据帧,DEMO系统需要通过置高PA5引脚来唤醒它。在启动UART端口发送序列前,存在一个最小为100微秒的延时(Txpreparetime)。发送完成后,PA5引脚会被拉低。具体时序及详细信息可在《锐米LoRa终端说明书》中找到。
4. UART通信帧解析算法:
RNDU470T的UART通信帧是变长数据帧,解析此帧推荐使用状态机方法。在中断服务程序(ISR)中完成解析工作,直到接收到结束符(0x0D)时,才将完整数据帧交给主程序(main程序)处理。这种方法简化了系统设计并确保了高效的数据处理。
5. 代码工程组成:
工程包含多个组件:main.c是DEMO系统的主体逻辑;DebugPort.c/.h提供了调试打印端口的驱动,方便连接到PC进行调试;key.c/.h负责按键的驱动;SHT7x.c/.h则是针对SHT10传感器的驱动代码。
这份文档为LoRa网络技术开发者提供了一个详尽的指导,从基本的软件配置到复杂的通信帧解析,覆盖了DEMO板软件系统设计的各个环节,有助于快速理解和实现基于LoRa的物联网应用。
锐米通信 www.rimelink.com
© 2016 Rime
®
Technology Inc. page -1
Rime
®
DEMO
锐米 LoRa 终端评估 DEMO 板_软件系统设计
1 软件开发环境
开发语言为 ASNI C,IDE 为 IAR for STM8,为降低复杂度没有使用操作系统。
2 Demo 系统逻辑
Demo 系统的主程序逻辑如上图所示,非常简洁,基于最简单的软件结构:while(1)
无限循环。系统无事可干时,进入低功耗模式(WFI:Wait For Interrupt);唤
醒后,根据事件类型分别响应:秒定时、用户按键和网关通信。
经过实测:Demo 系统采集 SHT10 的 12 位湿度约用时 62 毫秒,采集 14 位温
度约用时 216 毫秒。
下载后可阅读完整内容,剩余5页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2023-09-18 上传
2023-09-18 上传
2023-09-18 上传
2023-09-18 上传

心兰相随引导者
- 粉丝: 1108
- 资源: 5639
 我的内容管理
展开
我的内容管理
展开







最新资源
- WordPress作为新闻管理面板的实现指南
- NPC_Generator:使用Ruby打造的游戏角色生成器
- MATLAB实现变邻域搜索算法源码解析
- 探索C++并行编程:使用INTEL TBB的项目实践
- 玫枫跟打器:网页版五笔打字工具,提升macOS打字效率
- 萨尔塔·阿萨尔·希塔斯:SATINDER项目解析
- 掌握变邻域搜索算法:MATLAB代码实践
- saaraansh: 简化法律文档,打破语言障碍的智能应用
- 探索牛角交友盲盒系统:PHP开源交友平台的新选择
- 探索Nullfactory-SSRSExtensions: 强化SQL Server报告服务
- Lotide:一套JavaScript实用工具库的深度解析
- 利用Aurelia 2脚手架搭建新项目的快速指南
- 变邻域搜索算法Matlab实现教程
- 实战指南:构建高效ES+Redis+MySQL架构解决方案
- GitHub Pages入门模板快速启动指南
- NeonClock遗产版:包名更迭与应用更新
