上采样导向的帧率降低方法
157 浏览量
更新于2024-08-26
收藏 1.9MB PDF 举报
"面向上采样的帧速率降低"
在视频处理领域,帧速率的调整是一个重要的技术环节,尤其在需要节省存储空间或传输带宽时。本文"面向上采样的帧速率降低"是一篇研究论文,由Yongbing Zhang、Haoqian Wang和Debin Zhao等人撰写,来自中国清华大学深圳研究生院和哈尔滨工业大学计算机科学系。文章探讨了如何在降低帧速率的同时,减少信息损失并提高视频质量。
传统的帧速率降低方法是直接下采样,即按照固定的间隔保留原始输入序列中的帧,这种方法简单易行,但存在一个主要问题:它忽略了时间上采样过程中对插值帧的影响。当帧速率降低后,需要通过时间上采样来恢复丢失的帧,而直接下采样方法无法充分考虑这一过程,导致上采样后的插值帧质量下降,信息损失严重。
论文提出了一种创新的“面向上采样的帧速率降低”方法,该方法着重于在下采样阶段就考虑到后续的上采样过程。通过在下采样时保留更多的信息,尤其是与帧间运动相关的细节,以便在上采样时进行更准确的运动补偿帧插值。这种方法旨在改善直接下采样方法中插值帧的质量,从而在降低帧速率的同时,尽可能保持视频的视觉效果。
运动补偿帧插值是一种常见的视频处理技术,用于生成两帧之间的中间帧。论文中提出的方案可能会利用这种技术,通过分析相邻帧间的物体运动来预测和插入丢失的帧。通过这种方式,可以减轻由于帧速率降低而导致的视觉不连续性,使视频看起来更加平滑和自然。
这篇论文提出了一个新的策略,将时间上采样过程考虑进帧速率降低的步骤中,以期优化视频压缩和传输的性能。这种面向上采样的方法有望在视频编码、流媒体服务和移动设备的视频处理中找到应用,实现高效且高质量的视频处理。
^
X
t
ðn
,
Þ. To capture the varying property of frame contents,
in MCFI the whole frame is usually divided into a number
of blocks S, and each block has a motion vector v
,
¼ðv
x
, v
y
Þ
with the horizontal component v
x
and vertical component
v
y
, respectively. And then X
t
ðn
,
Þ can be formulated as
^
X
t
ðn
,
Þ¼w
f
P
f
ðn
,
Þþw
b
P
b
ðn
,
Þ
¼ w
f
X
t1
ðn
,
þv
,
f
Þþw
b
X
t þ 1
ðn
,
þv
,
b
Þð1Þ
where w
f
and w
b
are the relative weights of the forward
predicted block P
f
and the backward predicted block P
b
,
v
,
f
and v
,
b
represent the motion vectors in the forward
and backward reference frames. For the majority cases,
w
f
þw
b
¼ 1 and w
f
¼ w
b
¼ 1=2. More generally, v
,
f
and v
,
b
may be any fractional numbers [17]. If the motion vectors
are of sub-pixel accuracy, Eq. (1) is applied to the
corresponding references with fractional-pixel accuracy
to yield the up-sampled signals accordingly.
When a finite impulse response (FIR) filter with 2M-tap
is used for the 2-D separate interpolation, the reference
signals with motion vectors of horizontally, vertically and
diagonally half-pixel accuracy in each prediction direction
can be yielded by
Pðn
,
Þ¼
X
M
u ¼M þ 1
hðuÞX
r
ðn
x
þ v
x
bc
þu, n
y
þ v
y
Þð2Þ
Pðn
,
Þ¼
X
M
u ¼M þ 1
hðuÞX
r
ðn
x
þ v
x
bc, n
y
þ v
y
þuÞð3Þ
and
Pðn
,
Þ¼
X
M
u
1
¼M þ 1
hðu
1
Þ
X
M
u
0
¼M þ 1
hðu
0
ÞX
r
ðn
x
þ v
x
bc
þu
0
, n
y
þ v
y
þu
1
Þ
!
ð4Þ
where
bc
represents the operation rounded to the nearest
integer pixel position towards minus infinity and hðuÞ
represents the tap coefficient. The interpolated values
at the horizontal and vertical half-pixel positions are
obtained by applying a one-dimensional 2M-tap FIR
filter horizontally and vertically using Eqs. (2) and (3),
respectively. For the diagonally half-pixel position, one-
dimensional 2M-tap FIR filter needs to be performed
horizontally firstly and then vertically using Eq. (4). The
half pixels and full pixels are then utilized to interpolate
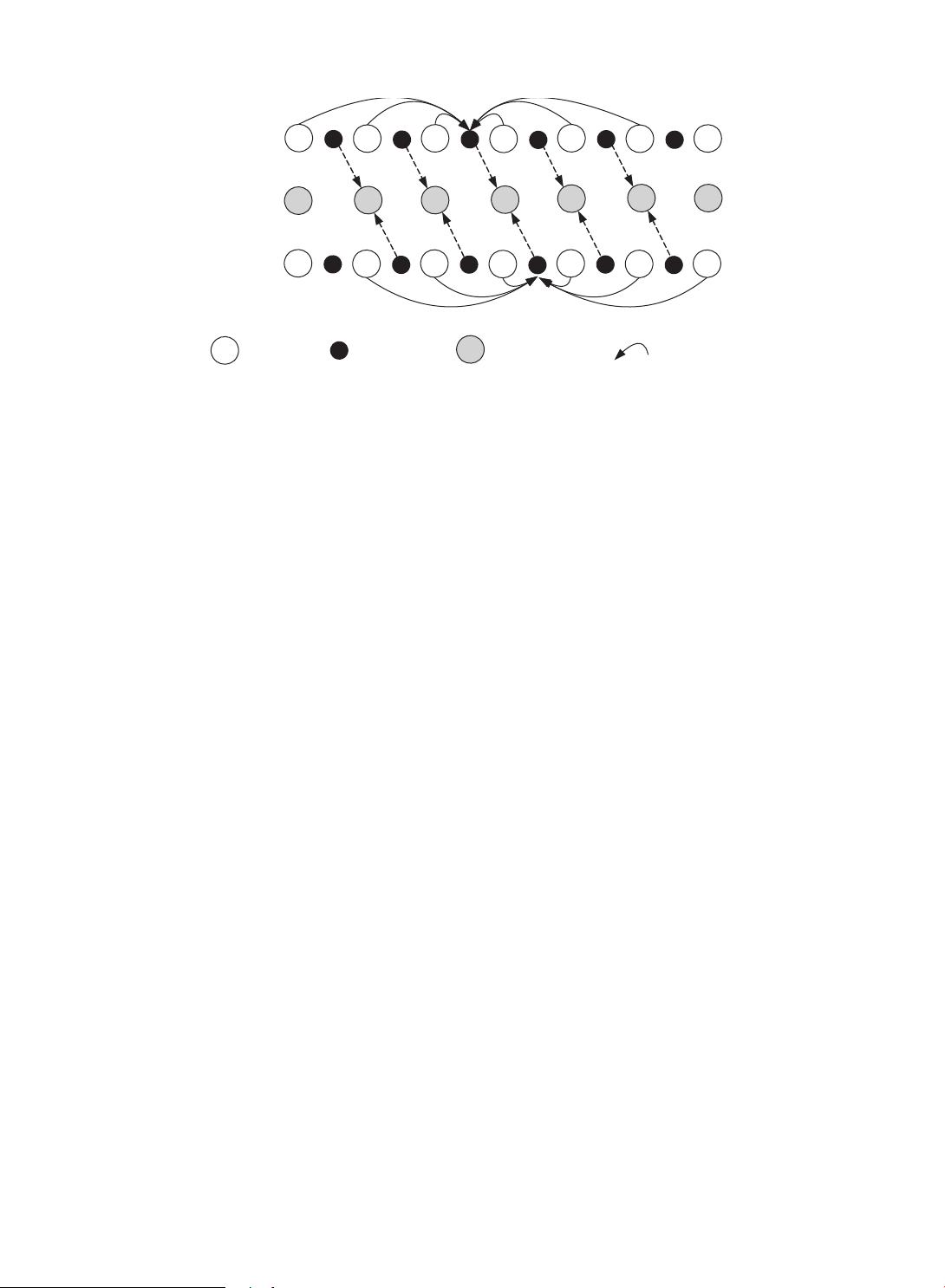
the quarter-pixels via bilinear method. Fig. 2 illustrates
the 1:2 frame rate up conversion process with horizon-
tally half-pixel accuracy in both directions when a FIR
filter h with 6-tap is used. The corresponding interpola-
tions are first used to generate the forward and backward
prediction blocks P
f
and P
b
using Eq. (2), respectively. And
then the up-sampled pixel can be yielded by Eq. (1).
2.2. Derivation of the optimal down-sampled frame
Traditional MCFI usually tries to find the most faithful
motion vectors for each block to be interpolated. Actually,
it is easy to observe from Eq. (1) that the quality of up-
sampled frames depends on not only the accuracy of
motion vectors but also the information contained in the
forward and backward reference frames. More informa-
tion about the frame to be interpolated embedded in the
forward and backward reference frames, up-sampled
frames with much higher quality can be obtained. To
transfer more information about the frame to be inter-
polated to the down-sampled frames, an up-sampling
oriented frame rate reduction is proposed in this subsec-
tion. Here, we will take MCFI [1] as an example to
describe the derivation of the optimal down-sampled
frame, and it can be easily extended to other frame rate
up conversion algorithms.
Define X
t
as the original frame in the input video at
time instance t in a vector form and the corresponding
up-sampled frame is
^
X
t
. For simplicity, we will take 1:2
MCFI as an example to derive the optimal solution of the
frame rate reduction problem. And of course, it can be
easily extended to arbitrary ratio MCFI. The goal of the
proposed frame rate reduction is to generate a high
quality interpolated frame while at the same time make
the down-sampled sequence faithful to the input one.
Consequently, the optimal down-sampled frame should
w
f
w
f
w
f
w
f
w
f
w
b
w
b
w
b
w
b
w
b
h
(
0
)
h
(
−1
)
h
(
−2
)
h
(
1
)
h
(
2
)
h
(
3
)
h
(
0
)
h
(
−1
)
h
(
−2
)
h
(
1
)
h
(
2
)
h
(
3
)
Full-pixel
sample
Fractional-pixel
sample
Upsampled-pixel
sample
t-1
t
t+1
...
...
...
...
...
...
Interpolation with
h
(
n
)
Fig. 2. 1:2 frame rate up conversion when v
,
f
¼1=2, 0
and v
,
b
¼ 1=2,0
.
Y. Zhang et al. / Signal Processing: Image Communication 28 (2013) 254–266256
剩余12页未读,继续阅读
2015-10-24 上传
2011-09-30 上传
2024-01-31 上传
2012-11-21 上传
2024-11-27 上传
2024-11-27 上传
2024-11-27 上传
2024-11-27 上传
2024-11-27 上传
2024-11-27 上传

weixin_38638309
- 粉丝: 3
- 资源: 943
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB新功能:Multi-frame ViewRGB制作彩色图阴影
- XKCD Substitutions 3-crx插件:创新的网页文字替换工具
- Python实现8位等离子效果开源项目plasma.py解读
- 维护商店移动应用:基于PhoneGap的移动API应用
- Laravel-Admin的Redis Manager扩展使用教程
- Jekyll代理主题使用指南及文件结构解析
- cPanel中PHP多版本插件的安装与配置指南
- 深入探讨React和Typescript在Alias kopio游戏中的应用
- node.js OSC服务器实现:Gibber消息转换技术解析
- 体验最新升级版的mdbootstrap pro 6.1.0组件库
- 超市盘点过机系统实现与delphi应用
- Boogle: 探索 Python 编程的 Boggle 仿制品
- C++实现的Physics2D简易2D物理模拟
- 傅里叶级数在分数阶微分积分计算中的应用与实现
- Windows Phone与PhoneGap应用隔离存储文件访问方法
- iso8601-interval-recurrence:掌握ISO8601日期范围与重复间隔检查
