




32位DSP驱动下,悬挂系统中步进电机运动控制与电路设计详解
PDF格式 | 291KB |
更新于2024-08-31
| 141 浏览量 | 举报
本文主要探讨了基于32位DSP(数字信号处理器)TMS320F28027的悬挂运动控制系统设计。随着技术的发展,32位DSP因其运算速度快、性能强大和资源丰富的特性,已经成为了控制领域的标准选择。TMS320F28027作为一个关键组件,负责精确控制两个步进电机的动作,从而实现物体在平面内的精确运动,如绘制曲线和圆。
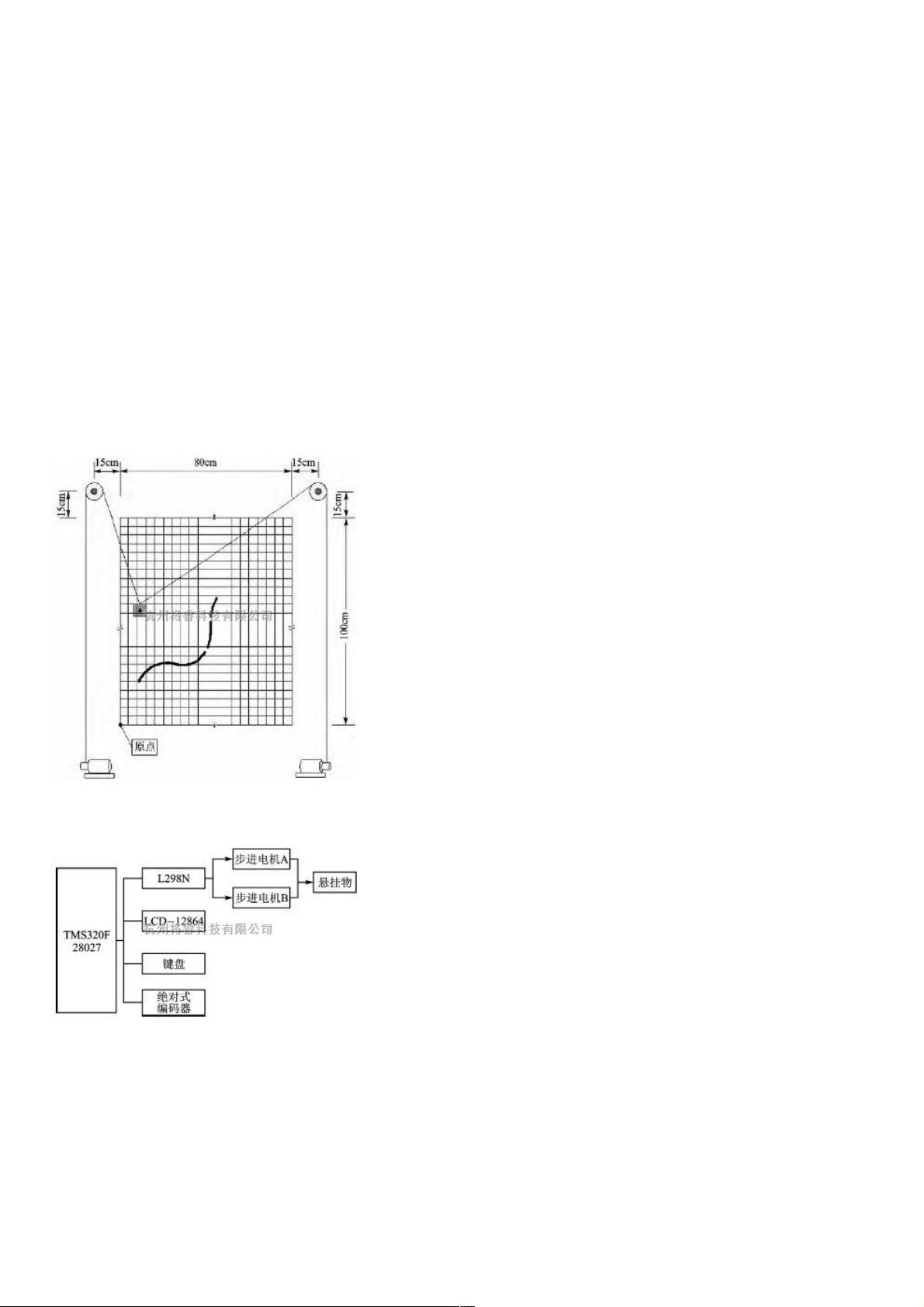
系统的核心设计围绕一个悬挂系统展开,通过图2所示的控制框图展示。TMS320F28027作为控制核心,驱动L298N电机驱动芯片来控制步进电机42HS4813A4,其具有1.3A的额定电流和1.8°的步距角。这个设计允许物体通过步进电机的正向和反向旋转,在平面上实现灵活的轨迹控制。为了实时监控物体的位置,系统还配备了LCD-12864液晶屏,用于显示被控制物的实时坐标。
硬件电路部分着重介绍了两个关键模块:L298N和绝对式编码器。L298N作为高电压、大电流的电机驱动器,能够满足步进电机1.3A的电流需求,其46V的工作电压和3A的峰值电流使其胜任驱动任务。而绝对式编码器Mini1024J则提供了10位的高精度测量,确保了系统的定位精度优于步进电机,采用了无接触霍尔检测技术,增强了系统的可靠性。
本文展示了如何利用32位DSP的高效性能和精确控制能力,结合合适的硬件组件,构建出一个能够实现复杂轨迹控制的悬挂运动控制系统。这种设计对于工业自动化、机器人技术等领域具有重要的应用价值。
DSP中的基于中的基于32位位DSP及电机驱动芯片的悬挂运动控制系统设及电机驱动芯片的悬挂运动控制系统设
计计
随着32位DSP的普及,32位处理器已经成为控制领域的主流产品,与传统的微处理器相比速度更快、性能更
强、资源丰富,更符合发展的脚步。TMS320F28027是一款32位的DSP,具有运算速度快、稳定性高的优点。本
文利用TMS320F28027控制两个步进电机,从而使物体在平面内运动,实现物体在平面内可以任意地画指定的
曲线和圆等。 1 系统总体方案的设计 图2为悬挂系统控制框图,以TMS320F28027为控制芯片,利用
L298N 驱动两个步进电机。步进电机采用42HS4813A4,其额定电流为1.3A,步距角为1.8°,利用LCD-12864液晶
显示被控制物的实时坐标。控制2个步进
随着 随着32位位DSP的普及,的普及,32位处理器已经成为控制领域的主流产品,与传统的微处理器相比速度更快、性能更强、资源丰位处理器已经成为控制领域的主流产品,与传统的微处理器相比速度更快、性能更强、资源丰
富,更符合发展的脚步。富,更符合发展的脚步。TMS320F28027是一款是一款32位的位的DSP,具有运算速度快、稳定性高的优点。本文利用具有运算速度快、稳定性高的优点。本文利用TMS320F28027控控
制两个步进电机,从而使物体在平面内运动,实现物体在平面内可以任意地画指定的曲线和圆等。制两个步进电机,从而使物体在平面内运动,实现物体在平面内可以任意地画指定的曲线和圆等。
1 系统总体方案的设计系统总体方案的设计
图2为悬挂系统控制框图,以TMS320F28027为控制芯片,利用L298N 驱动两个步进电机。步进电机采用42HS4813A4,
其额定电流为1.3A,步距角为1.8°,利用LCD-12864液晶显示被控制物的实时坐标。控制2个步进电机正向、反向转动来达到物
体在平面内任意运动的效果。
图1 悬挂系统的模型
图2 悬挂系统控制框图
2 硬件电路设计硬件电路设计
2.1 L298N
L298N是ST公司生产的一种高电压、大电流电机驱动芯片。图3为L298N模块的电路原理图。该芯片的主要特点是:工作
电压高,其最高工作电压可达46V;输出电流大,瞬间峰值电流可达3A,持续工作电流为2A;内含两个H 桥的高电压大电流全桥
式驱动器。利用2个L298N来分别控制2个步进电机,步进电机的额定电流为1.3A,同时通2相时,电流为2.6A,L298N 可以达到
42HS4813A4步进电机的电流要求。
下载后可阅读完整内容,剩余4页未读,立即下载
相关推荐



weixin_38545485
- 粉丝: 5
 我的内容管理
展开
我的内容管理
展开








最新资源
- 掌握Winpcap:TCP数据包捕获与分析
- MATLAB高级算法应用与案例分析进阶教程
- JAVA网上商城系统设计与实现(SSH框架)
- node-v8.11.1: 下一代JavaScript工具包
- 2018中兴软创Java面试题深度解析
- MFC和VC++实现多种风格按钮教程
- 微信小程序实现家居电商平台功能
- Matlab实现电话拨号音合成与识别技术
- Java实现二维码生成与解析的zxing案例
- SQLServer+Struct技术构建宾馆管理系统
- MATLAB图像处理算法书籍配套资料大全
- Zedboard基础教程:The_Zynq_Book_Tutorials资源
- 数据库运维与故障应急处理手册指南
- 单核DVFS型处理器上的多任务并行计算优化实验
- 广电中心设备CAD图块集锦
- 球坐标系下的弹性波有限差分模拟加速技术






















