多PTZ摄像头系统:目标检测与定位研究
版权申诉
29 浏览量
更新于2024-07-02
收藏 2.28MB PDF 举报
本文主要探讨了构建一个多PTZ(Pan-Tilt-Zoom)主动摄像头的目标检测定位系统,涉及目标检测、目标跟踪、目标交接、摄像头调度等多个关键环节,并提出了一系列相应的解决方案。
一、多PTZ摄像头目标检测定位系统概述
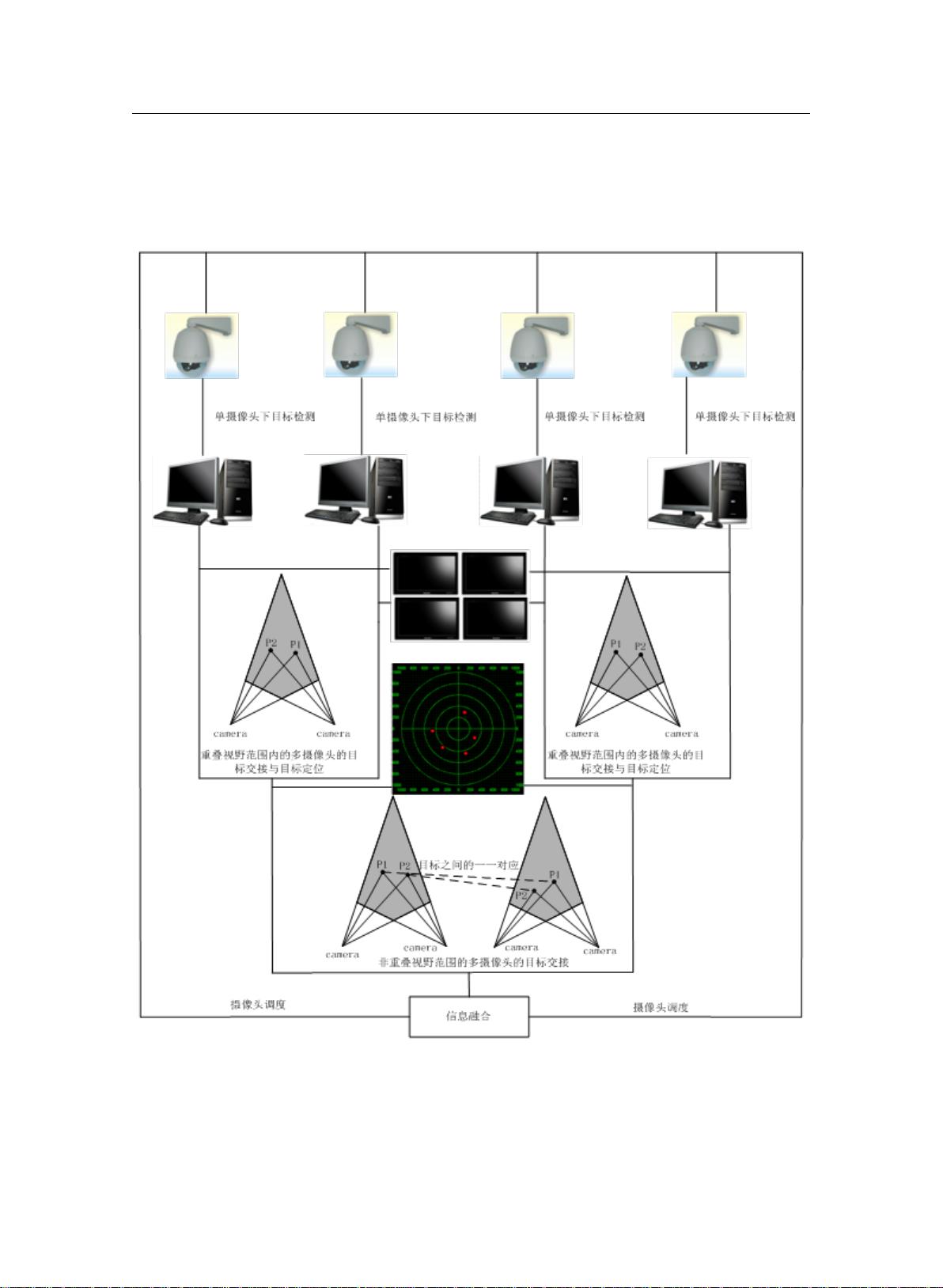
多PTZ摄像头系统集成了图像处理、通信技术和工业控制等技术,用于智能视频监控。本文的重点在于设计这样一个系统,通过分析其架构和技术需求,实现目标的高效检测和精确定位。
二、目标检测与跟踪
1. 目标检测:文中对比了光流法、帧差分法和背景建模法,针对行人检测,采用了HOG特征结合SVM分类器的方法。通过对检测到的区域进行缩放,适应检测窗口大小,提高了行人检测的准确性。
2. 目标跟踪:探讨了粒子滤波算法和CamShift算法,这两种算法在跟踪目标时各有优势,可以根据实际场景选择适用的算法。
三、多摄像头间目标交接
1. 重叠视野目标交接:利用平面单应性矩阵和SIFT特征匹配实现目标交接。通过RANSAC算法剔除错误匹配,增强了目标交接的稳定性。
2. 非重叠视野目标交接:提出了基于D-S证据理论的目标特征融合方法,结合目标的SIFT特征、色度和形状信息,提高在目标密集情况下的鲁棒性。
四、目标定位
为简化摄像机标定过程,文章提出利用多个摄像头的相对位置,通过多路视频目标定位算法计算目标的坐标,实现了无须复杂标定的定位方式。
五、摄像头网络协同调度
1. MDP(Markov Decision Process)算法:通过引入目标优先级,改进了多摄像头的协同调度策略。
2. POMDP(Partially Observable Markov Decision Process)算法:同样引入目标优先级,优化了多PTZ摄像头的协同调度,提高了系统响应效率。
六、系统设计与验证
最终设计了一个多PTZ摄像头目标检测定位系统,并对其有效性进行了初步验证,证明了该系统在目标检测、跟踪、交接和调度等方面的实用性和有效性。
关键词:目标检测,目标定位,目标交接,摄像头调度

电子科技大学硕士学位论文
4
据需要进行处理,多摄像头的目标交接以及多路数据的融合是数据管理的主要技
术难点;系统还需将监控状况实时告知用户。
与单摄像头的信息量少不同,多摄像头系统的构建比较复杂,必须考虑系统
架构、多摄像头布置、摄像机间通信以及多摄像头的协同调度问题。一般情况下,
摄像头的视野范围与摄像头的位置间存在矛盾的关系,视野好必须位置好,但多
数情况下要求摄像头位置比较隐蔽。现在,采用多个摄像头来进行智能监控一般
采取两种系统构架模式:客户端-客户端架构和服务器-客户端方式。前者需要在摄
像头之间传输系统数据,这样,每个摄像头端都清楚的知道整个监控系统全局的
信息,但是图像数据量巨大,摄像头间的信息传递存在较大问题,应用范围暂时
不是很广;后者由一个总控制室(服务器端)和多个摄像头观测点(客户端)构
成,数据由摄像头传给总控制室,总控制室完成整个监控系统的监测和控制工作。
通信方式一般有无线和有线之分。各摄像头之间需要保持同步性,以便顺利完成
摄像头之间的目标交接,目前主要有保持帧同步和设置相同的系统时间两种方法,
后者需要各个摄像头在执行检测目标和提取目标特征的工作的时候按照某一特定
的时间处理和传输数据;前者标定摄像头,使各摄像头起始时间相等,并且各摄
像头具有相同的帧率,检测目标并且提取目标特征的时候,要按照相对应的视频
帧进行数据传输和数据处理。采用多摄像头系统既可以扩大监控范围,又可以消
除或者减小监控盲区,但随之而来的是成本、复杂性、技术难度的增加和目标交
接等新问题的出现。
多摄像头间的目标交接是指当目标由一个摄像头的观测范围进入另一个摄像
头的观测视野时监控系统能够分辨出该目标的运动连贯性。目前的主要算法有:
视野分界线、特征融合、队列、三维信息等。特征融合一般选择颜色、外形、位
置等简单特征得出对应关系;场景固定、场景信息易得并且对摄像头标定要求不
高的情况下可以使用基于摄像机标定信息的方法;队列的目标交接方法利用摄像
头间的转换关系确定目标对应关系;视野分界线的目标交接方法主要利用的原理
是目标进入或离开摄像分界线时离视野分界线距离最近;基于目标模型的交接利
用的是目标的不随空间、时间变化的特性。但是,目前并没有哪一个算法能够十
分准确、稳定地进行摄像头之间的目标交接。
多摄像头间的协作是构建多摄像头视频监控系统必需面对的问题
[9-14]
。文献[9]
的多摄像头协同采用了彩色颗粒滤波的方法;文献[10]采用的分布式监控系统的协
同算法是基于目标与信息采集器间距离及可见度分类的;文献[11]采用的方法将位
置方差作为评价标准,最小化位置方差;文献[12]提出主从式摄像头调度跟踪算法,
借鉴了无线传感网络的应用;文献[13,14]采用了基于摄像头簇的协作方法,克服了


剩余83页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-09-23 上传
2022-09-23 上传
2021-09-18 上传
2022-09-19 上传
2014-02-13 上传
2022-07-31 上传

programhh
- 粉丝: 8
- 资源: 3741
 我的内容管理
展开
我的内容管理
展开







最新资源
- JHU荣誉单变量微积分课程教案介绍
- Naruto爱好者必备CLI测试应用
- Android应用显示Ignaz-Taschner-Gymnasium取消课程概览
- ASP学生信息档案管理系统毕业设计及完整源码
- Java商城源码解析:酒店管理系统快速开发指南
- 构建可解析文本框:.NET 3.5中实现文本解析与验证
- Java语言打造任天堂红白机模拟器—nes4j解析
- 基于Hadoop和Hive的网络流量分析工具介绍
- Unity实现帝国象棋:从游戏到复刻
- WordPress文档嵌入插件:无需浏览器插件即可上传和显示文档
- Android开源项目精选:优秀项目篇
- 黑色设计商务酷站模板 - 网站构建新选择
- Rollup插件去除JS文件横幅:横扫许可证头
- AngularDart中Hammock服务的使用与REST API集成
- 开源AVR编程器:高效、低成本的微控制器编程解决方案
- Anya Keller 图片组合的开发部署记录
