视觉SLAM十四讲:从理论到实践
需积分: 0 117 浏览量
更新于2024-06-30
收藏 85.58MB PDF 举报
"视觉SLAM十四讲1"
《视觉SLAM十四讲》是一本关于Simultaneous Localization And Mapping(SLAM)技术的书籍,由高翔和张涛共同编写,主要探讨了从理论到实践的SLAM相关知识。本书旨在帮助读者理解和掌握视觉SLAM的基本原理和实现方法。
在第1讲的前言中,作者介绍了本书的主要内容,包括SLAM的基本概念、书的使用方法以及读者定位。书中采用的组织方式是逐步深入,由简至繁,不仅有理论讲解,还配有实际操作的代码示例。此外,书中还提到了代码部分,表明会涉及编程实践,适合有一定编程基础的读者。风格约定部分则明确了书中的写作规范,而致谢和声明则表达了作者对支持者的感谢以及版权等相关声明。
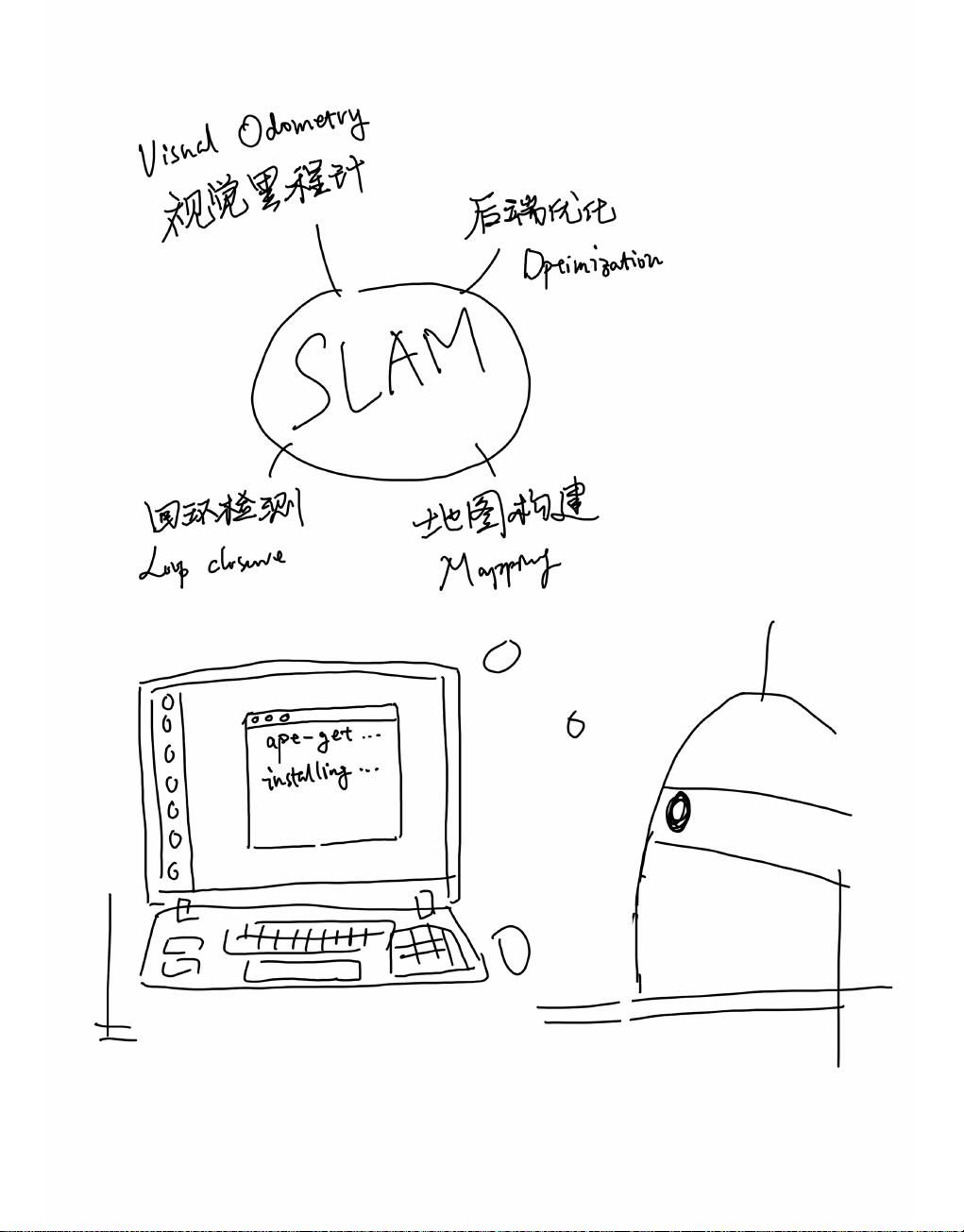
第2讲初识SLAM通过一个小萝卜的例子引入,生动地解释了SLAM的基本流程,包括视觉里程计(Visual Odometry)、后端优化、回环检测和建图等核心环节。同时,这一讲还详细阐述了SLAM问题的数学表述,帮助读者建立数学模型,并介绍了编程基础,包括Linux操作系统安装、HelloSLAM程序的编写、CMake的使用、库的管理和IDE的运用。
第3讲详细讲解了三维空间刚体运动的相关知识,如旋转矩阵、旋转向量、欧拉角和四元数。这些是理解SLAM中机器人运动和姿态的关键。此外,还介绍了Eigen库的使用、相似、仿射和射影变换的概念,以及如何进行几何变换的实践。最后,通过可视化演示帮助读者更好地理解所学内容。
第4讲深入到李群与李代数,这是描述三维旋转和平移的基础数学工具。这部分内容涵盖了群论的基本概念,李代数的引出、定义,特别是SO(3)和SE(3)这两个在SLAM中至关重要的李代数。指数与对数映射的讨论有助于理解旋转的连续表示,而李代数求导与扰动模型则为SLAM中的误差分析和系统稳定性提供了理论基础。
这本书不仅涵盖了SLAM的理论基础,还强调了实践应用,通过实例和代码示例使读者能够动手实践,从而更好地掌握SLAM技术。无论是对SLAM感兴趣的初学者还是希望深化理解的专家,都能从中受益。
1.3 风格约定 7
1. 数学公式单独列出,重要公式在右侧记序号,例如:
y = Ax. (1.1)
标量使用斜体字(如 a),向量和矩阵使用粗斜体(如 a, A)。空心粗体代表特殊集
合,如实数集 R,整数集 Z。李代数部分使用哥特体,如 se(3)。
2. 程序代码以方框框出,使用小号字体,左侧带有行号。如果程序较长,方框会延续到
下一页:
1 #include <iostream>
2 using namespace std;
3
4 int main ( int argc, char** argv )
5 {
6 cout<<"Hello"<<endl;
7 return 0;
8 }
3. 当代码数量较多或与有部分与之前列出的重复,不适于完全列在书中时,我们仅给出
重要片段,并以(片段)二字注明。因此,我们强烈建议读者到 github 上下载所有
源代码,完成练习,以更好地掌握本书知识。
4. 由于排版原因,书中展示的代码会与 github 中代码有稍许排版上的不同。请以 github
代码为准。
5. 我们用到的每个库,在第一次出现的时候会有比较详细的说明,但在后续的使用中就
不再反复赘述。所以,建议读者按章节顺序阅读本书内容。
6. 每节的开头会给出本讲的内容提要,而末尾会有小结和练习题。引用的参考文献在书
的最后列出。
7. 带有星号开头的章节是选读部分,读者可以视兴趣阅读。跳过它们不会对理解后续章
节产生影响。
8. 重要内容在文中以黑体标出,你可能已经习惯了。
9. 我们设计的实验大多数是演示性质。看懂了它们不代表你已经熟悉整个库的使用。所
以我们建议你在课外花一点时间,对本书经常用的几个库进行深入的学习。
10. 本书的习题和选读内容可能需要你自己搜索额外材料,所以你需要学会使用搜索引
擎。


剩余398页未读,继续阅读
2021-05-04 上传
2024-05-14 上传
2022-04-23 上传
2024-05-13 上传
2023-08-15 上传
2023-08-25 上传

葡萄的眼泪
- 粉丝: 18
- 资源: 303
 我的内容管理
展开
我的内容管理
展开







最新资源
- 单片机串口通信仿真与代码实现详解
- LVGL GUI-Guider工具:设计并仿真LVGL界面
- Unity3D魔幻风格游戏UI界面与按钮图标素材详解
- MFC VC++实现串口温度数据显示源代码分析
- JEE培训项目:jee-todolist深度解析
- 74LS138译码器在单片机应用中的实现方法
- Android平台的动物象棋游戏应用开发
- C++系统测试项目:毕业设计与课程实践指南
- WZYAVPlayer:一个适用于iOS的视频播放控件
- ASP实现校园学生信息在线管理系统设计与实践
- 使用node-webkit和AngularJS打造跨平台桌面应用
- C#实现递归绘制圆形的探索
- C++语言项目开发:烟花效果动画实现
- 高效子网掩码计算器:网络工具中的必备应用
- 用Django构建个人博客网站的学习之旅
- SpringBoot微服务搭建与Spring Cloud实践
