机器人正运动学解析
需积分: 3 149 浏览量
更新于2024-08-02
收藏 2.07MB PPT 举报
"该资源是一份关于机器人课程的PowerPoint讲义,主要涵盖了机器人正运动学和逆运动学的概念,适合机械类研究生学习。"
在机器人学中,正运动学和逆运动学是两个核心概念,它们对于理解机器人操作和控制至关重要。正运动学主要涉及如何根据机器人的关节参数(关节角度)来计算其末端执行器(手部)在空间中的位置和方向,即位姿。描述机器人的位姿通常需要用到笛卡尔坐标系统,包括位置(x, y, z坐标)和姿态(旋转角度)。正运动学方程可以将这些关节变量转换为笛卡尔坐标下的手部位置。
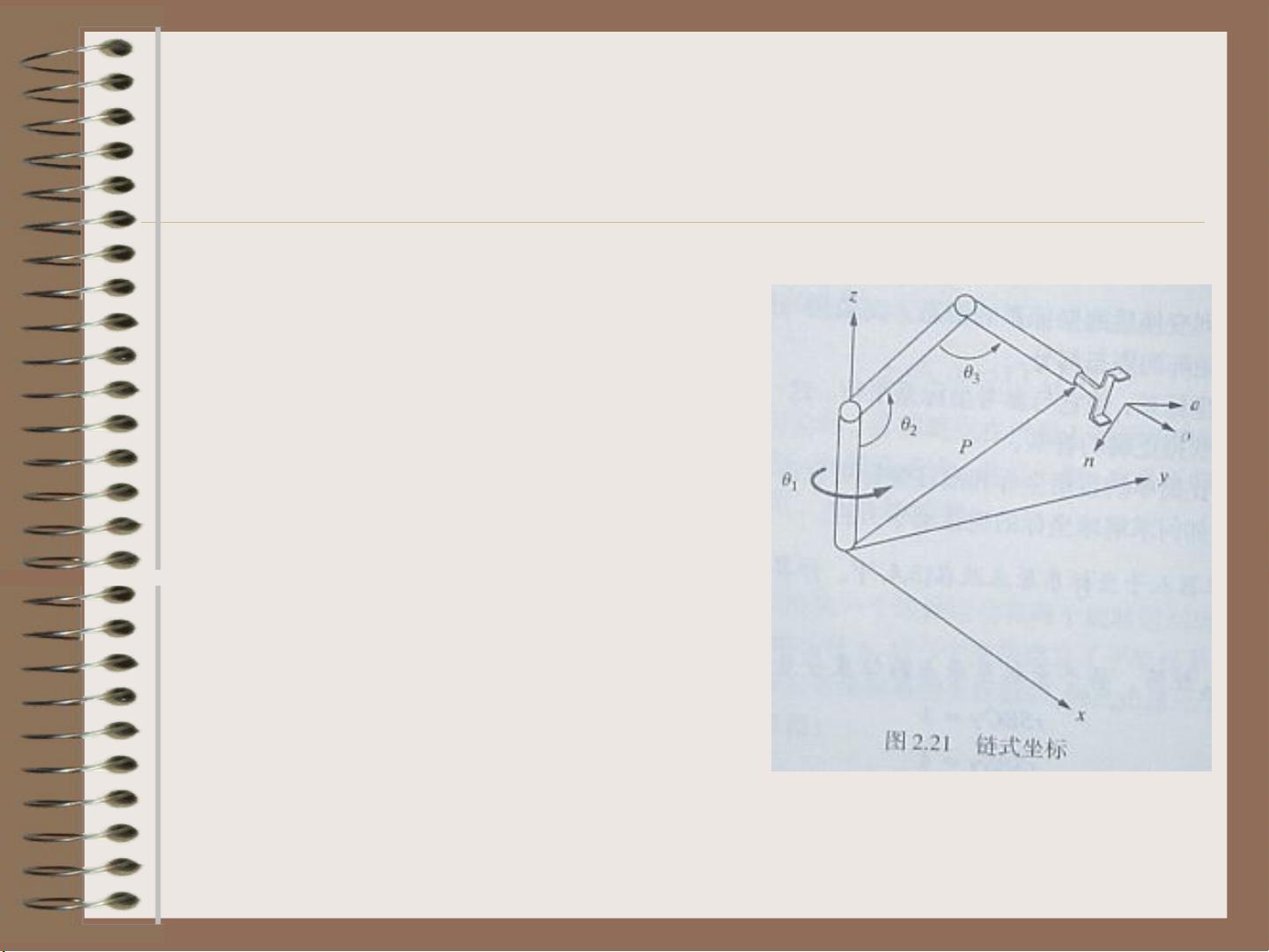
主讲人吴海彬在讲解中提到,正运动学分析是基于已知的机器人结构和关节角度,通过一组数学方程来确定机器人手的坐标系与参考坐标系之间的关系。这通常涉及到连杆的长度和关节的旋转角度,以及一系列的坐标变换。在实际应用中,例如,如果一个机器人手臂需要准确地到达一个目标位置,正运动学会告诉我们每个关节需要转动的角度是多少。
另一方面,逆运动学则是一个相反的过程,它涉及到寻找一组关节角度,使得机器人手能够到达期望的位姿。这通常比正运动学更复杂,因为可能存在多个解,甚至无解的情况,特别是在有冗余自由度的机器人中。逆运动学的解决方案可以用于机器人路径规划和精确操纵任务。
讲义中还提到了位置正运动学,这是一个更具体的子领域,关注的是如何通过改变关节位置来实现手部在空间中的平移。通过一系列的坐标变换矩阵(如Tcyl),可以将关节坐标转换为笛卡尔坐标下的平移量,沿着x、y、z轴进行移动。这些变换矩阵包含了旋转(Rot)和 translation(Trans)成分,确保了位置的改变而姿态保持不变。
在实际的机器人控制系统设计中,正运动学和逆运动学的知识被广泛应用于路径规划、姿态控制以及机器人与环境的交互。对于机械工程领域的研究生来说,理解和掌握这些基本概念对于深入研究机器人技术及其应用至关重要。通过深入学习和实践,可以更好地理解和应用这些理论,从而在机器人设计和控制领域取得进步。
机器人正运动学
球坐标
例:假设要将球坐标机器人手坐标系原点放在 [3,4,7] ,
计算机器人的关节变量。
3
csr
4
ssr
7
cr
列方程:
3
4
tg
1.53
1.233
或
8.0
s
5
sr
7
5
tg
5.35
5.215
或
6.8r
6.8r
或
8.0
s
5
sr
7
5
tg
5.144
5.35
6.8r
6.8r
四组解!
剩余46页未读,继续阅读
200 浏览量
点击了解资源详情
419 浏览量
2021-08-14 上传
303 浏览量
319 浏览量
163 浏览量
2025-01-07 上传
2025-01-07 上传
2025-01-07 上传

qingse2388
- 粉丝: 0
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- 第33课
- 行业分类-设备装置-一种扩散性纸张增湿设备.zip
- 电子发票管理系统 衡德电子发票台账 v2.4
- qle:QMK徽标编辑器
- sEMG_Basic_Hand_movements:sEMG 基本手部运动的 Matlab 代码-matlab开发
- 立体像对的空间前方交会-点投影系数法+共线方程严密法(C# winform)
- 塔夫
- ImDisk Toolkit:Windows 版 Ramdisk 和映像文件的挂载-开源
- weatherForcast
- 行业分类-设备装置-一种承托、贴靠式安装的装配式墙体.zip
- 贷款合同管理 宏达贷款合同管理系统 v1.0
- shopping-list-modules-day
- psiat1
- Meross:研究Meross MSS310智能插头
- apache-maven-3.6.3-bin
- Eduonix-[removed]JavaScript游乐场,该资源库探索了不同的JS组件,功能以及如何使工具直观
