UM-BUS总线驱动的智能轮椅系统:一种新型高效架构
62 浏览量
更新于2024-08-31
1
收藏 352KB PDF 举报
"基于UM-BUS总线的智能轮椅系统设计"
UM-BUS总线是本文的核心关注点,它是一种可重构的高速串行总线,具有显著的扩展性和动态容错能力。相较于传统的智能轮椅控制系统,使用UM-BUS总线能有效解决现有系统在扩展、功耗和复杂性上的挑战。UM-BUS总线的最大特点在于其节点直接互连的总线型拓扑结构,允许最多30个设备连接,传输距离可达40米,而且无需中继设备。这种设计降低了系统的复杂性和功耗,提升了整体的效率。
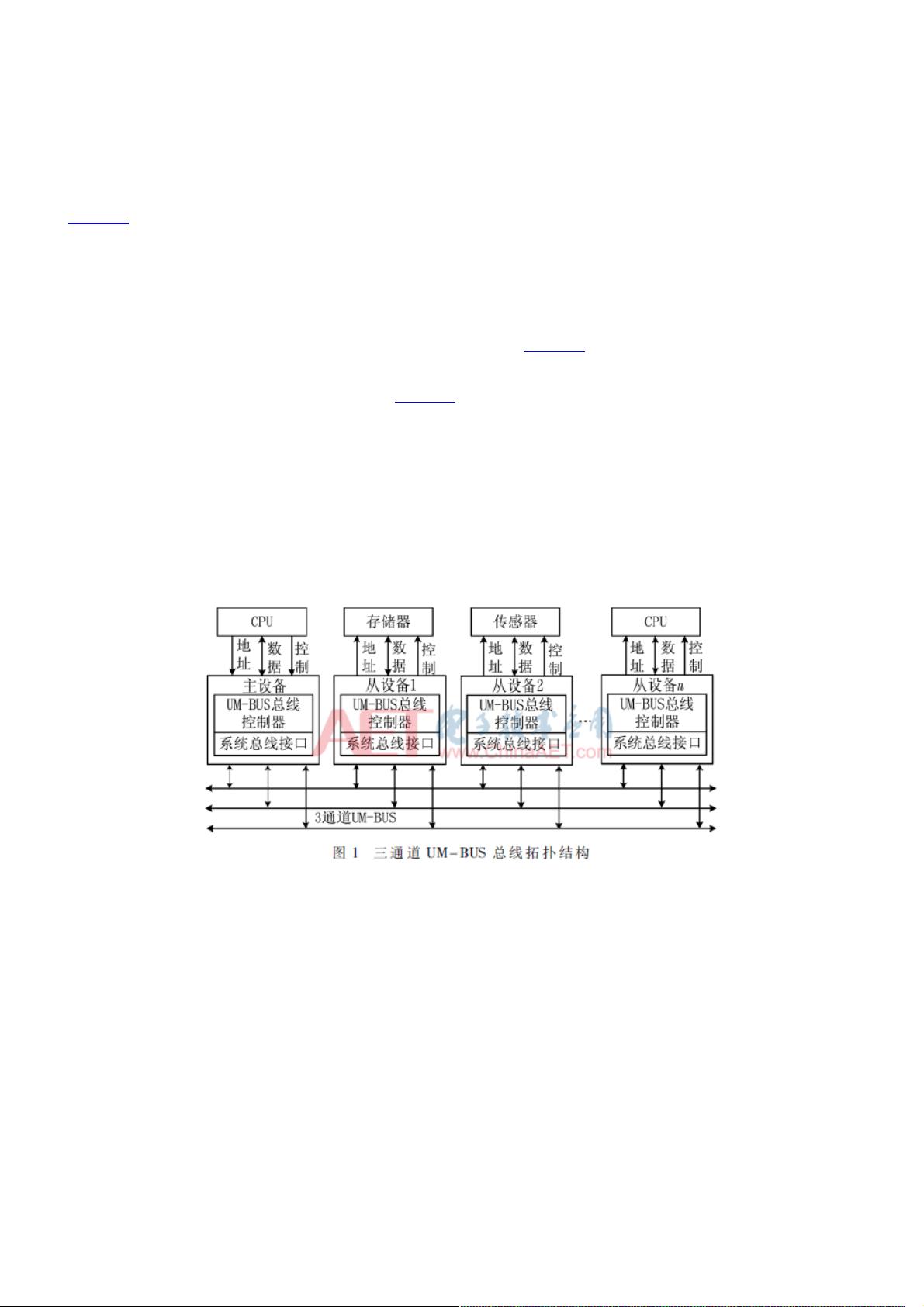
UM-BUS总线支持N条并发传输通道,其中N不超过32,且这些通道之间有冗余备份,确保了系统的容错性。每个通道的最高传输速率为200Mb/s,当使用32条通道时,总传输速率可高达6.4Gb/s。在实际应用中,如图1所示,采用三通道结构时,最高传输速率可达600Mb/s,同时对2条信号通道提供容错机制,增强了系统的稳定性。
智能轮椅控制系统的设计基于UM-BUS总线,构建了一个通用的硬件与软件平台。这样的平台不仅便于扩展新的功能模块,如添加更多的传感器或控制设备,如Kinect图像传感器、脑电仪、辅助机械臂等,还能确保系统具有高可靠性。通过UM-BUS总线,各个功能模块可以高效同步工作,降低了系统异步性带来的复杂性,使得智能轮椅能够更好地适应不断增长的智能化需求。
在智能轮椅的体系结构方面,新提出的方案强调了集中管理和分布式执行的平衡,利用UM-BUS的特性减少了处理器升级的需求,降低了系统成本,同时保持了良好的扩展性。通过这样的设计,智能轮椅控制系统能够更灵活地应对不同应用场景,提高用户的生活质量,尤其对于老年人和残疾人的移动和自主性提供了有力的支持。
基于UM-BUS总线的智能轮椅系统代表了一种先进的技术解决方案,它融合了高速数据传输、高效系统集成和高可靠性,为未来智能轮椅和其他类似服务机器人的发展提供了新的思路和实践基础。通过深入研究和优化UM-BUS总线的应用,可以预见智能轮椅的性能将得到显著提升,同时也会推动整个服务机器人领域向着更加智能化、人性化的方向迈进。
基于基于UM-BUS总线的智能轮椅系统的新型体系结构总线的智能轮椅系统的新型体系结构
针对可重构高速串行总线(UM-BUS)的特性,提出基于UM-BUS总线的智能轮椅系统的新型体系结构,该结构
在扩展性、动态容错等方面优于传统体系结构。在新型体系结构的基础上,设计了通用的硬件与软件平台。所
设计的智能轮椅控制系统具有扩展便捷、高可靠以及通用性强的特点。
0 引言引言
智能轮椅作为服务机器人的一种,有助于提高老年人和残疾人群体的生活质量。经过几十年的发展,国内外对智能轮椅的
研究已取得很多的成果,如MAID项目、西班牙SIAMO项目、希腊MEYR-A项目、可配置的轮椅/床系统等
[1]
。但是,随着技术
进步与应用需求的发展,智能轮椅对可靠性、标准化、扩展性方面提出了更高的要求。
智能轮椅是一个集环境感知、动态规划、行为控制与执行等多功能于一体的综合系统
[1]
。对于各功能模块之间的互连,大部
分智能轮椅采用CAN、LonWorks等现场总线,而采用现场总线往往使控制系统具有高度的分散性,这会导致多MCU带来的高
功耗问题,并且各模块的异步性增加了系统的复杂度。同时,随着智能化程度的提高,面对不断增加的传感器和复杂功能模块
的连接需求,如Kinect图像传感器、脑电仪、辅助机械臂等,以往的系统体系结构会重新选择性能更强的处理器来满足接入设
备的通信接口要求,这样不仅提高了系统的成本,还不宜系统的扩展。
本文首先介绍UM-BUS总线特性,着重强调总线的扩展便捷性与故障容错能力。然后提出基于UM-BUS总线的智能轮椅控制
系统的新型体系结构,并与传统体系结构进行比较。同时,从组成结构与通信过程方面,对新型体系结构进行了阐述。最后,
设计并实现了该结构通用的硬件与软件平台。
1 UM-BUS总线总线
UM-BUS总线是一种新型高速串行总线。采用节点直接互连方式的总线型拓扑结构,最多可连接30个总线节点设备,最大
传输距离40 m,无需中继与路由器;最多支持N(N≤32)条通道并发传输,这些并发通道又互为冗余备份。因此为保证基本的容
错能力,硬件上需配置至少2条信号通道;采用多点低压差分信号(M-LVDS)传输方式,单通道传输速率最高达200 Mb/s,因
此在采用32条通道并发传输的情况下,传输速率可达6.4 Gb/s
[2]
。图1为三通道UM-BUS总线拓扑结构图,传输速率最高达600
Mb/s,最多可对2条信号通道进行容错。
UM-BUS总线采用主从命令应答式通信协议,每次通信只能由主控节点发起,从节点响应主控节点的通信命令,最后在主
控节点的控制下完成数据的接收或发送。该总线定义了按地址空间访问的方式,可实现对远程设备内部功能单元的直接访问。
地址空间分为3种:存储空间、IO空间和配置空间,各地址空间支持读写操作,按字节独立编址
[2]
。其中配置空间可用来访问
总线设备的属性配置数据,包括地址空间需求、传感器类型、总线带宽配置等信息。通过访问UM-BUS总线配置空间的配置信
息,系统可对总线上接入的节点实现动态管理。在接入或更换某节点时,系统会对该节点进行自动识别,实现设备的“即插即
用”。如图1所示,CPU、存储器设备、传感器设备通过数据线、地址线、控制线与UM-BUS总线控制器相连,主设备将以访问
本地存储单元的方式访问远程设备,相当于将其中一部分功能模块像传统的分布式处理结构那样作为IO扩展单元,这样主控
单元既可作为系统的核心处理单元,又可进行类似的IO扩展,将某一部分功能模块嵌入到本地测量系统中,整个系统看作一
个集中控制的分布式系统。
UM-BUS总线具有故障检测、故障隔离与动态容错能力
[2]
。主节点通过所有通道向从节点发送通道检测命令来检测通道是否
健康,并建立通道故障信息表。当一个通道发生故障时,首先更新通道故障信息表,及时剔除故障通道,然后将数据重新组织
分配到可用通道上进行传输,最终实现数据的动态分配与通道的动态重构。
伴随CPS与物联网新兴技术的兴起,信息物理系统的融合正在不断现实化,通过网络互联实现信息交互、资源共享、协同
计算是未来嵌入式系统重要的发展趋势。为实现信息物理的深度融合,需要在系统中部署大量各类传感元件实现信息的大量采
集,这使得其嵌入式控制系统的规模不断增大,如何从系统体系结构方面考虑,解决传感器数量大幅增加情况下对信息的实时
可靠采集,并能够降低系统能耗和成本,已成为智能制造系统需要重点解决的问题之一。在新发展需求下,智能轮椅控制系统
面临同样的问题,即在多类传感器接入的情况下,如环境感知、身体状况检测等,如何更好地进行协调控制与融合处理
[3]
。本
文设计使用UM-BUS总线作为智能轮椅控制系统的互连总线,硬件平台采用嵌入式系统技术。
下载后可阅读完整内容,剩余5页未读,立即下载
2021-09-08 上传
2016-11-14 上传
2020-10-17 上传
2020-10-15 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

weixin_38499553
- 粉丝: 11
- 资源: 904
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握压缩文件管理:2工作.zip文件使用指南
- 易语言动态版置入代码技术解析
- C语言编程实现电脑系统测试工具开发
- Wireshark 64位:全面网络协议分析器,支持Unix和Windows
- QtSingleApplication: 确保单一实例运行的高效库
- 深入了解Go语言的解析器组合器PARC
- Apycula包安装与使用指南
- AkerAutoSetup安装包使用指南
- Arduino Due实现VR耳机的设计与编程
- DependencySwizzler: Xamarin iOS 库实现故事板 UIViewControllers 依赖注入
- Apycula包发布说明与下载指南
- 创建可拖动交互式图表界面的ampersand-touch-charts
- CMake项目入门:创建简单的C++项目
- AksharaJaana-*.*.*.*安装包说明与下载
- Arduino天气时钟项目:源代码及DHT22库文件解析
- MediaPlayer_server:控制媒体播放器的高级服务器
