Simulink模拟小车运动学:代码构建与仿真教程
版权申诉
54 浏览量
更新于2024-07-03
1
收藏 9.25MB PPTX 举报
"小车运动学仿真是一个用于模拟三轮小车动态行为的过程,它涉及到曲线规划、运动学、动力学以及控制器的设计。通过使用Simulink工具,我们可以构建模型来实现小车的轨迹跟踪。这个教学内容包括了一系列步骤,从搭建基本模块到调整参数,最终完成小车运动学模型的创建。提供的代码和教程涵盖了从模块选择、连线、子系统创建到内部函数编辑等关键环节。"
在小车运动学仿真中,首先需要理解小车的运动学模型。三轮小车(3Car_Like)通常有三个轮子,其中两个固定在后方,一个位于前方,这种布局使得小车可以通过改变前轮的角度来改变行驶方向。运动学模型描述了车辆的位置(x, y)和角度(θ)如何随速度(V)和转向角(φ)变化。
Simulink是MATLAB的一个扩展,用于系统级的建模和仿真。在这个教程中,Simulink模块的构建过程如下:
1. 首先,从Simulink元件库中选择合适的模块,如信号源、数学运算符、数据类型转换等,来构建小车的运动学模型。
2. 模型输入包括速度V和转向角φ,这些值可以是预先定义的或者来自外部控制器。
3. 使用数学运算模块(例如fun、fun1、fun2等)来计算小车的位置和角度。例如,fun模块可能包含了速度乘以余弦(φ)的计算,以确定x坐标的变化;fun1可能包含了速度乘以正弦(φ)的计算,用于确定y坐标的变化;fun2则可能包含了速度除以车轮基距L再乘以正切(φ),以得到θ的变化。
4. 创建子系统来封装这些计算,使模型更清晰且易于管理。将输入变量重命名为V和φ,输出变量重命名为x、y和θ,以提高模型的可读性。
5. 存储模型为`.slx`文件,便于后续调用和仿真。
在完成模型建立后,可以进行仿真运行,观察小车在不同输入条件下的轨迹和动态性能。这有助于理解小车的动态特性,以及对控制器设计的优化。此外,封装后的子系统还可以作为其他复杂模型的组件,提高建模效率。
小车运动学仿真的应用广泛,包括自动驾驶、机器人路径规划、车辆动力学研究等领域。通过这种方式,工程师可以预测车辆的行为,从而改进控制策略,确保小车能准确、稳定地跟踪预设路径。学习并掌握这些技能,对于从事相关领域的工作至关重要。
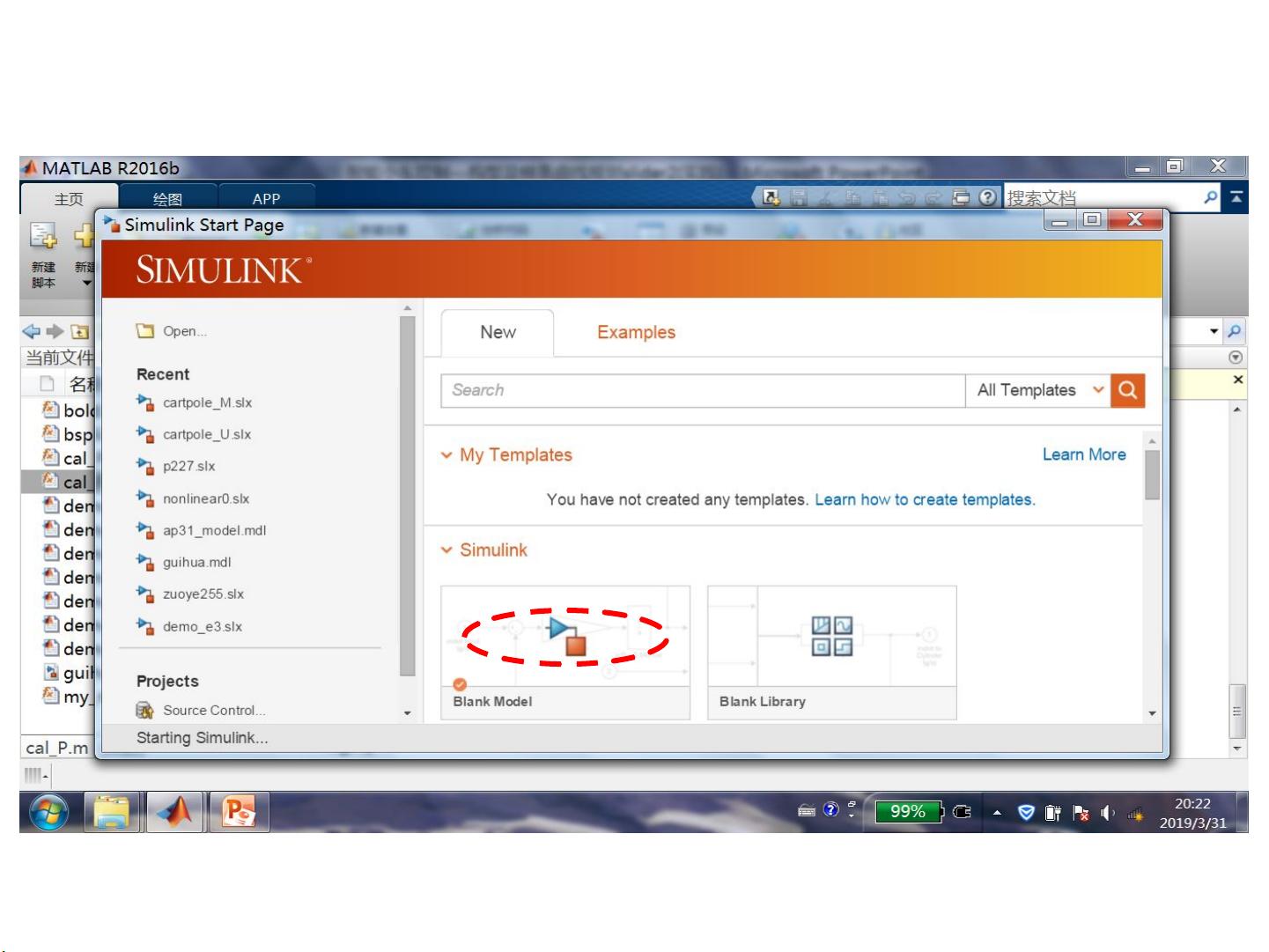
3 Car_Like 运动学 Simulink 模块 (6)
点击红圈按钮

剩余32页未读,继续阅读

CAE工作者
- 粉丝: 225
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java源码实战经典:随书源码解析
- Java PDF生成器iText开源jar包集合
- Booth乘法器测试平台设计与实现
- 极简中国风PPT模板:水墨墨点创意设计
- 掌握openssh-5.9:远程Linux控制的核心工具
- Django 1.8.4:2015年最新版本的特性解析
- C# WinFrom图片放大镜控件的实现及使用方法
- 易语言模块V1.4:追梦_论坛官方增强版
- Yelp评论情绪分析方法与实践
- 年终工作总结水墨中国风PPT模板精粹
- 深入探讨雷达声呐信号处理与最优阵列技术
- JQuery实现多种网页特效指南
- C#实现扑克牌类及其洗牌功能的封装与调用
- Win7系统摄像头显示补丁快速指南
- jQuery+Bootstrap分页插件的四种创意效果展示
- 掌握karma-babel-preprocessor:实现ES6即时编译
