立体图像质量评估:联合双目能量对比感知方法
100 浏览量
更新于2024-08-26
收藏 2.91MB PDF 举报
"联合双目能量对比感知用于立体图像质量评估"
这篇研究论文深入探讨了立体图像质量评估的新方法,特别是如何利用人的双目视觉系统(BVS)来更准确地评估立体图像的质量。立体图像,即3D图像,是通过为左右眼提供略有差异的图像来创造深度感知的。双目视觉系统在处理这些图像时,会经历两种主要的双目交互现象:双眼融合和双眼竞争。
双眼融合是指大脑将来自左右眼的不同图像合并成一个单一、有深度感的图像。而双眼竞争则是在两个图像信息不完全匹配时,大脑可能会交替关注一个眼睛的图像,而不是整合两者。这两种机制在立体图像质量评估中起着关键作用,因为它们直接影响观看者的视觉体验和图像的可接受度。
论文中提出了一种新的全参考立体图像质量评估模型,称为“联合双目能量对比感知”(Joint Binocular Energy-Contrast Perception)。这个模型考虑了双眼能量对比,即比较左右眼接收到的图像的亮度和对比度信息。这种比较有助于模拟人眼如何处理立体图像中的差异,以评估图像的整体质量。
为了构建这个模型,作者可能采用了视觉敏感度函数(CSF,Contrast Sensitivity Function)的概念。CSF描述了人类视觉系统对不同空间频率和对比度的敏感度,这在理解和预测人眼对图像质量的感知上非常有用。通过结合CSF和双眼能量对比,该模型可以更精确地捕捉到立体图像中可能引起视觉不适或质量下降的因素。
此外,论文可能还包含了实验设计和结果分析,通过与现有的立体图像质量评估方法进行对比,验证了新模型的有效性和优越性。这些实验可能包括主观评价,如双耳合成质量评估(DSQA,Double Stimulus Quality Assessment)或单耳质量评估(SSQA,Single Stimulus Quality Assessment),以及客观评价,如基于模型的评估方法。
这篇研究论文为立体图像质量评估提供了一个创新的、基于生物视觉机制的方法,这有助于提高3D内容的制作和显示标准,确保观众获得更佳的视觉体验。对于3D图像处理、视频编码、显示技术以及人机交互等领域的发展具有重要的理论和实践意义。
J. Ma et al. Signal Processing: Image Communication 65 (2018) 33–45
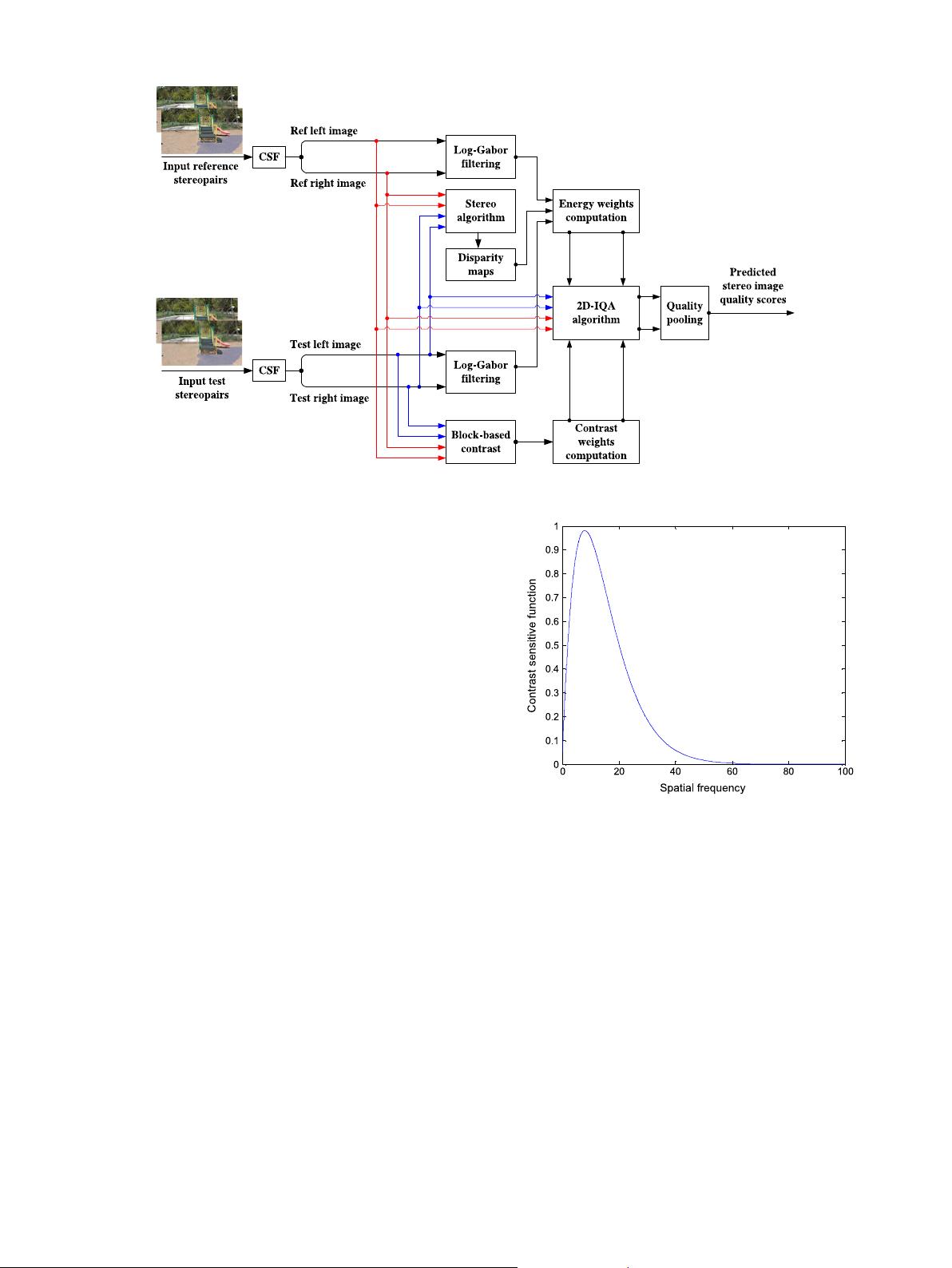
Fig. 1. Proposed FR quality assessment framework for stereoscopic images.
2.1. Contrast sensitivity function filtering
Since there are some inherent limitations with respect to the visibil-
ity of stimuli, the BVS is not equally sensitive to all stimuli. According
to [28], the binocular visual sensitivity to stimulus at different spatial
frequencies is different which could be modeled by an empirical CSF.
A widely-used CSF is the one introduced by Mannos and Sakrison [29]
with adjustments specified by Daly [30]. This CSF, 𝐻(𝑓, 𝜃), is defined
as
𝐻(𝑓, 𝜃) =
2.6(0.0192 + 𝜆𝑓
𝜃
) exp[−(𝜆𝑓
𝜃
)
1.1
], if𝑓 ≥ 𝑓
𝑝𝑒𝑎𝑘
𝑐∕ deg
0.981 otherwise
(1)
where 𝑓 denotes the radial spatial frequency in cycles per degree of
visual angle (c/deg),𝜃 ∈
[
−𝜋, 𝜋
]
denotes the orientation, and 𝑓
𝜃
=
𝑓∕[0.15 cos(4𝜃 + 0.85)] accounts for the oblique effect. Fig. 2 shows the
resulting curves called Mannos and Sakrison’s CSF. From Fig. 2, we can
see that the BVS is sensitive to a limited range of frequencies. Therefore,
in this paper, we consider variations in sensitivity to spatial frequency by
applying the CSF filtering independently to each image of the reference
and distorted stereopairs. Suppose we apply the CSF filtering to the
luminance image
𝐿
𝑙
. This CSF filtering is performed in the frequency
domain via
𝐼 = 𝐹
−1
H(𝑢, 𝑣) × 𝐹 [
L
𝑙
]
(2)
where 𝐹 [.] and 𝐹
−1
[.] denote the DFT and inverse DFT, respectively. The
quantity
H(𝑢, 𝑣) denotes a DFT based version of 𝐻(𝑓, 𝜃), where 𝑢, 𝑣 are
the DFT indices. Here, the CSF is further adjusted as described in [31]
to have a lowpass profile by explicitly setting frequencies below 𝑓
𝑝𝑒𝑎𝑘
to 0.981, which is the maximum value of 𝐻
(
𝑓, 𝜃
)
as determined by 𝜆.
According to [31–33], we have set 𝜆 = 0.114, resulting in a peak at
a frequency of 𝑓
𝑝𝑒𝑎𝑘
≈ 8𝑐∕ deg, which is measured before forcing the
lowpass profile within the range of 1 to 8 c/deg typically reported for
CSF.
2.2. The weights of binocular energy perception
From a biological point of view, the stereoscopy can be defined as
the association of two eyes in the visual analysis of the same region of
the scene. If the information received by the two eyes is compatible, the
brain combines their inputs in a way that yields a stable, unitary percept.
Fig. 2. Spatial frequency response curve of CSF.
This process of combination, known as ‘‘binocular fusion’’. However,
for merging of slightly different images from the two eyes, arising from
binocular disparity, into a single stereoscopic perception, the BVS needs
to decide which points in the left and right images correspond to the
same physical location. In [34], Banks et al. pointed out that the BVS
might solve the correspondence problem by using an approach similar to
cross-correlation. Also, several electro-physiological experiments have
provided detailed descriptions of the response properties of binocular
neurons in the primary visual cortex [35,36]. Interestingly, these re-
sponses of the receptive field are well described by binocular energy
model [37,38]. Since the binocular energy model provides a good
description of the first stages of cortical binocular processing, many
previous studies adopted binocular energy model for diverse 3D visual
signal processing [39,40]. For example, Bensalma et al. [39] proposed
a stereoscopic color image coding approach by using binocular energy
model. Furthermore, in stereo vision, binocular energy response not only
depends on the amplitude and phase but also relies on the disparity
information inputs. Because of the left and right images do not have the
same position, the left view response 𝑅
𝑙
(𝑥, 𝑦) is the equal of a shifted
35
剩余12页未读,继续阅读
2021-08-19 上传
2021-09-18 上传
点击了解资源详情
点击了解资源详情
2021-04-30 上传
2021-03-03 上传
2021-09-25 上传
点击了解资源详情
点击了解资源详情

weixin_38562026
- 粉丝: 3
- 资源: 949
 我的内容管理
展开
我的内容管理
展开







最新资源
- IEEE 14总线系统Simulink模型开发指南与案例研究
- STLinkV2.J16.S4固件更新与应用指南
- Java并发处理的实用示例分析
- Linux下简化部署与日志查看的Shell脚本工具
- Maven增量编译技术详解及应用示例
- MyEclipse 2021.5.24a最新版本发布
- Indore探索前端代码库使用指南与开发环境搭建
- 电子技术基础数字部分PPT课件第六版康华光
- MySQL 8.0.25版本可视化安装包详细介绍
- 易语言实现主流搜索引擎快速集成
- 使用asyncio-sse包装器实现服务器事件推送简易指南
- Java高级开发工程师面试要点总结
- R语言项目ClearningData-Proj1的数据处理
- VFP成本费用计算系统源码及论文全面解析
- Qt5与C++打造书籍管理系统教程
- React 应用入门:开发、测试及生产部署教程
