微控制器驱动的两轮自平衡车控制系统设计
需积分: 50 170 浏览量
更新于2024-07-19
2
收藏 792KB DOCX 举报
"基于单片机的两轮自平衡车控制系统设计"
本文主要探讨了如何利用单片机技术设计一个能够自主平衡的两轮自平衡车。这种车辆的稳定性依赖于精确的传感器数据处理和实时控制策略。以下是文章的核心知识点:
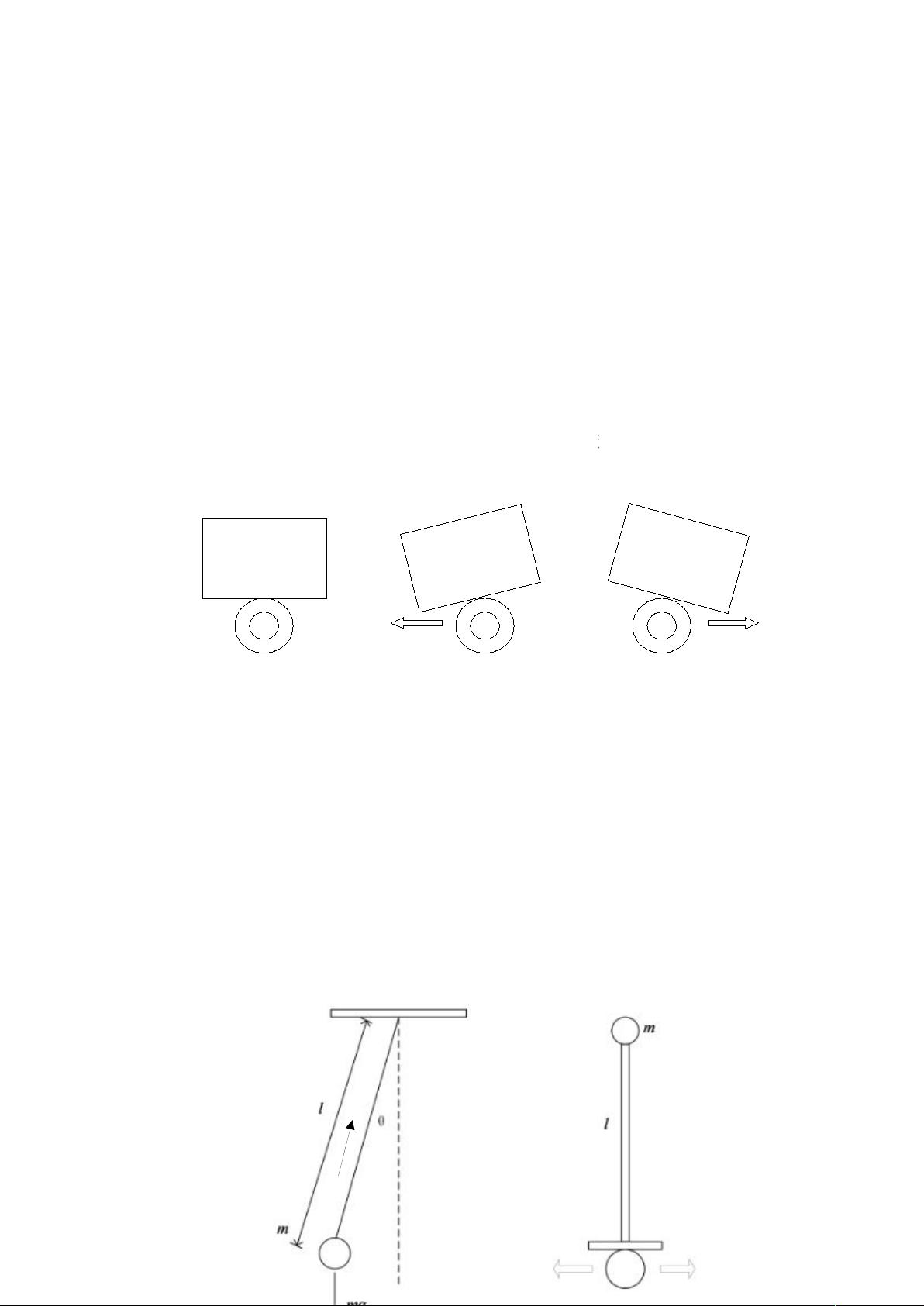
1. 倒立摆原理:
两轮自平衡车的运作机制类似于物理中的倒立摆,其基本挑战在于克服自身的不稳定状态,保持直立行驶。这需要精确的传感器数据和高效的控制算法。
2. MPU-6050传感器:
MPU-6050是一款集成加速度计和陀螺仪的传感器,用于检测车辆的倾斜角度和旋转速率,为控制系统提供关键的输入数据。
3. 数据融合与互补滤波:
为了准确地获取车辆姿态信息,设计中采用了互补滤波技术,将陀螺仪的高频率数据与加速度计的低频稳定性数据融合,消除单一传感器的误差,提高姿态测量精度。
4. STC12C5A60S2单片机:
选用了STC公司的8位单片机STC12C5A60S2作为主控制器,它负责处理来自传感器的数据,执行控制算法,并向电机驱动芯片发送指令。
5. PID算法:
PID(比例-积分-微分)控制器是实现平衡的关键。它根据传感器反馈的数据,计算出适当的控制量,调整电机的转速,从而调整车体的姿态,使其保持平衡。
6. 电机驱动芯片TB6612FNG:
TB6612FNG是一款高性能的双通道电机驱动芯片,能够接收单片机的控制信号,高效驱动小车的两个电机,确保它们能根据需要正反转,以维持平衡或调整方向。
7. 无线控制:
通过蓝牙通信模块,用户可以远程控制小车的前进、后退和转向,增强了车辆的实用性与娱乐性。
8. 稳定性测试:
完成后的系统在无外力干预时能够自动保持平衡,即使受到一定的外部干扰,也能迅速调整恢复到稳定状态,显示出良好的动态性能。
总结,这个基于单片机的两轮自平衡车设计集成了硬件和软件的先进技术,通过精确的传感器数据处理和实时控制,实现了车辆的自主平衡和灵活操控。这种设计不仅适用于科研教学,也为智能移动平台的研发提供了参考。
以上三个任务都是通过控制小车两个车轮的驱动电机完成的。
直流电机的控制最终取决于电机两端输入的电压大小,将电机近似认为处
于线性状态,因此上述三个基本任务可以等效成三种不同控制目标的电压,将
这三种电压进行叠加后,便可以得到最终所需的电压,并将其施加在电机上以
达到所追求的控制效果。
在这三个任务中,保持小车平衡是关键,三个任务执行的优先级为:平衡
控制>速度控制>转向控制。由于小车同时受到三种控制的影响,从平衡控制
角度来看,其他两个控制就成为了它的干扰。因此对小车速度、方向的控制应
该尽量保持平滑,以减少对平衡控制的干扰。
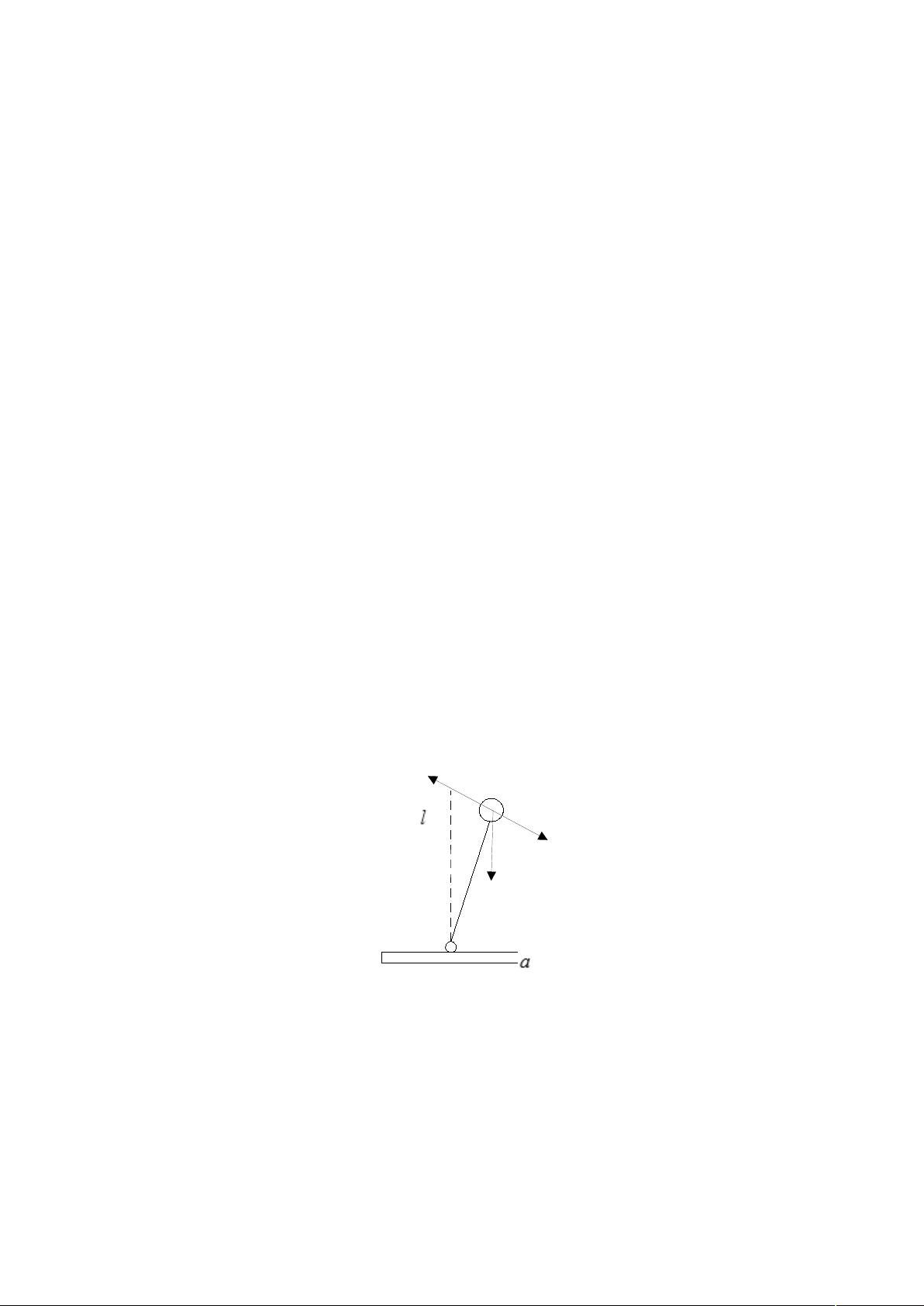
上述三种控制各自独立进行,它们各自假设其他两个控制都已经达到稳定。
比如控制小车加速和减速的时候,平衡控制一直在起作用,它会自动改变小车
的倾角,使小车实现加速和减速。
3.2 控制原理
生活中有很多直立控制的例子,例如一个正常人可以经过简单的练习,让一
根直木棒在水平的掌心中保持直立。这需要两个条件:一是托着木棒的手掌可
以移动;二是眼睛可以观察到木棒的倾斜角和倾斜趋势(角加速度)。可以通
过手掌的移动抵消木棒的倾斜角度和趋势,从而保持木棒的直立。这两个条件
缺一不可,这就是控制中的负反馈机制。
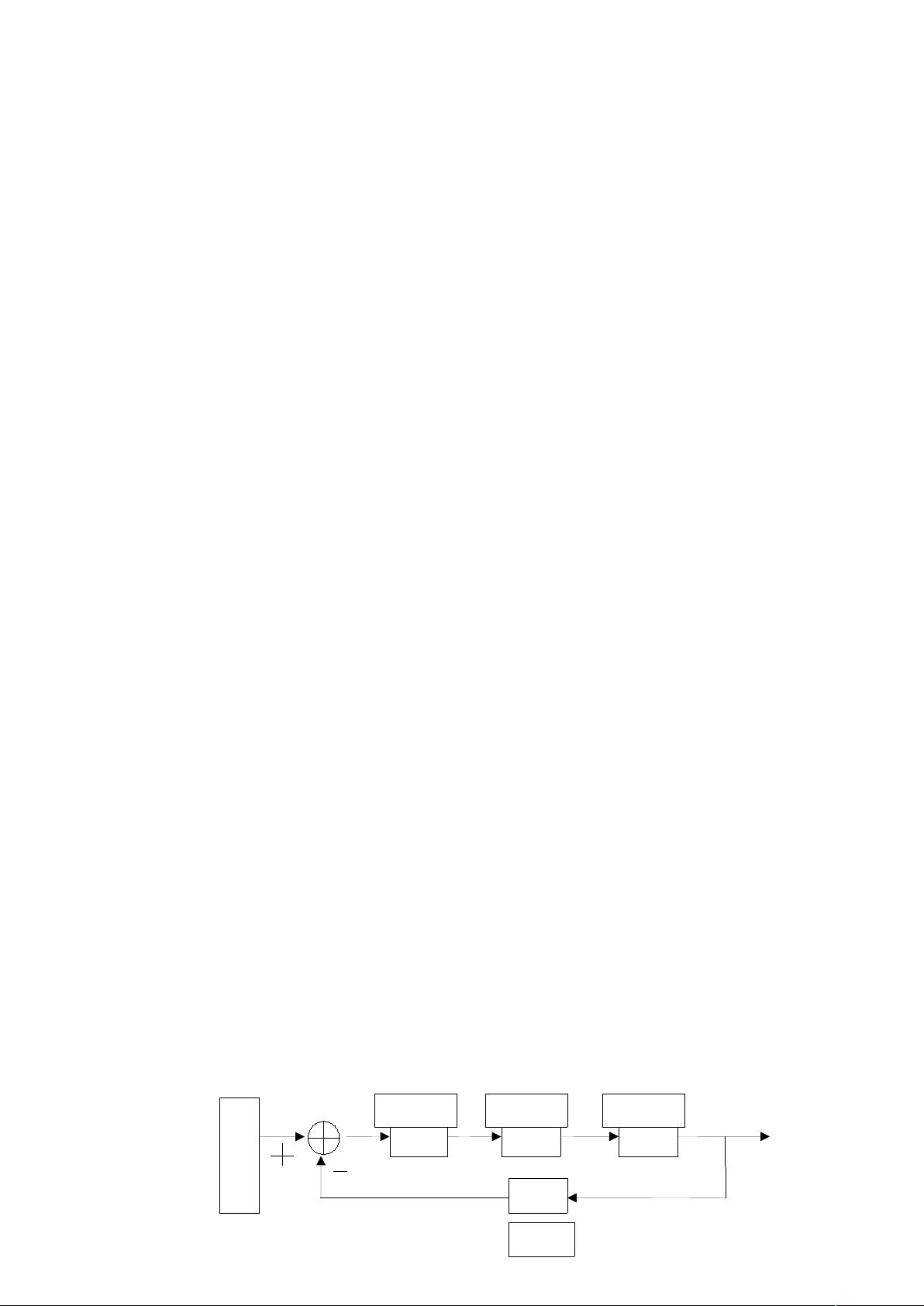
大脑 手掌 木棒
眼睛
控
制
给
定
控制算法 执行机构 控制对象
传感器
剩余63页未读,继续阅读
2023-04-11 上传
2024-10-30 上传
2024-01-04 上传
2024-10-30 上传
2023-04-07 上传
2023-07-16 上传

shuaiqidexiaojiejie
- 粉丝: 5
- 资源: 9
 我的内容管理
展开
我的内容管理
展开







最新资源
- 前端协作项目:发布猜图游戏功能与待修复事项
- Spring框架REST服务开发实践指南
- ALU课设实现基础与高级运算功能
- 深入了解STK:C++音频信号处理综合工具套件
- 华中科技大学电信学院软件无线电实验资料汇总
- CGSN数据解析与集成验证工具集:Python和Shell脚本
- Java实现的远程视频会议系统开发教程
- Change-OEM: 用Java修改Windows OEM信息与Logo
- cmnd:文本到远程API的桥接平台开发
- 解决BIOS刷写错误28:PRR.exe的应用与效果
- 深度学习对抗攻击库:adversarial_robustness_toolbox 1.10.0
- Win7系统CP2102驱动下载与安装指南
- 深入理解Java中的函数式编程技巧
- GY-906 MLX90614ESF传感器模块温度采集应用资料
- Adversarial Robustness Toolbox 1.15.1 工具包安装教程
- GNU Radio的供应商中立SDR开发包:gr-sdr介绍
