ZM-VS1200机器视觉教学实验平台实操案例:尺寸测量与识别应用
需积分: 10 21 浏览量
更新于2024-07-26
收藏 2.42MB PDF 举报
"HALON实做範例是一份详细的机器视觉教学实验指南,主要针对西安交通大学自动化科学与技术系的ZM-VS1200机器视觉教学实验平台。该平台旨在提供丰富的实验教育资源,帮助学生深入理解和掌握机器视觉的基本原理和技术应用。课程内容涵盖了一系列实际操作和理论学习,如工件尺寸测量(包括齿长、齿宽、齿间距离等)、群孔面积测量、形状匹配、光学字符识别(如人民币币值识别和回形针识别)、汽车牌照识别、边缘与线段提取等,这些都是基于HALON软件的强大功能。
平台的核心功能包括尺寸测量(精确测量工件多个参数),配准测量(定位和判定工件的准确位置),跟踪测量(对运动物体进行图像追踪和识别),光学字符识别,条形码识别,以及对工件表面划痕、缺陷和焊点的检测。此外,它还支持图像处理和模式识别,允许通过VC编程实现算法应用,并结合HALON进行一体化的图像测量、处理和识别。
ZM-VS1200平台具有良好的灵活性,分辨率可以根据需求调整,支持多种帧率,适应不同场景的采集速度。同时,平台配备有可调节的前光源和背光源,以适应不同的光照条件。通过这些实验,学生不仅能够掌握机器视觉的基础知识,还能培养独立思考和实践创新能力,将所学理论应用于工业测控领域,甚至在实际生产环境中解决各种问题。
这份实做範例是机器视觉教育中不可或缺的参考资料,对于想要进入或深化机器视觉领域的学生和研究人员来说,它提供了宝贵的实践经验与技术实践平台。"

8
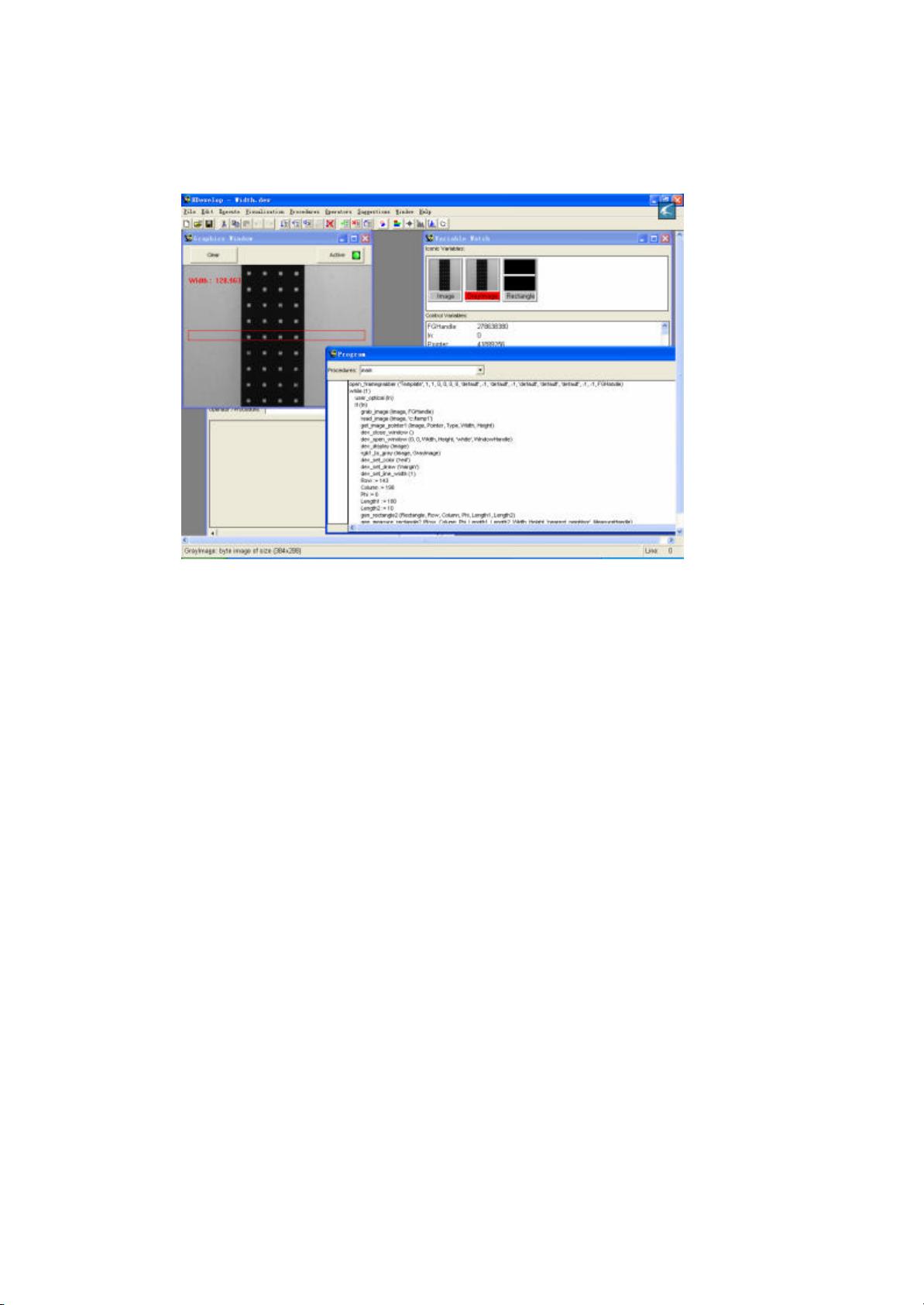
user_optical(In)//
If(In)//
grab_image(Image,FGHandle)//
read_image(image.’c:/templ’) // grab_image c:/templ
c:/templ
get_image_point1(image,Point,Type,Width,Height) //
dev_close_window()
dev_open_window(0,0, Width,Height,’white’,WindowHandle) //
dev_display(Image) //
rgb1_to_gray(Image,GrayImage) // rgb
dev_set_color(‘red’) //
dev_set_draw(‘margin’) //
dev_set_line_width(1) //
Row:=143
Column:=190
Phi:=0
Length1:=180
Length2:=10
gen_rectangle2(Rectangle, Row,Column,Phi,Length1,Length2) //
gen_measure_rectangle(Rectangle,Row,
Column,Phi,Length1,Length2,Width,Height,’nearest_nearest’,MeasureHandle)
gen_measure_pairs(GrayImage,MeasureHandle,1,30,’all’,’all’,RowEdgeFirst,ColumnEdgeFirst,
AmplitudeFirst,RowEdgeSecond,ColumnEdgeSecond,AmplitudeSecond,IntraDistance,Inter
Distance)//
Width:= IntraDistance
set_tposition(WindowHandle,2412) //
write_string(WindowHandle, ’Width: ’+ Width) //
wait_second(3)
endif
wait_second(0.01)
endwhile
l us
l
l gen_measure_rectangle
l gen_measure_pairs
剩余42页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-05-22 上传
2023-04-03 上传
2023-04-03 上传
点击了解资源详情

jessonlove1978
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 基于Python和Opencv的车牌识别系统实现
- 我的代码小部件库:统计、MySQL操作与树结构功能
- React初学者入门指南:快速构建并部署你的第一个应用
- Oddish:夜潜CSGO皮肤,智能爬虫技术解析
- 利用REST HaProxy实现haproxy.cfg配置的HTTP接口化
- LeetCode用例构造实践:CMake和GoogleTest的应用
- 快速搭建vulhub靶场:简化docker-compose与vulhub-master下载
- 天秤座术语表:glossariolibras项目安装与使用指南
- 从Vercel到Firebase的全栈Amazon克隆项目指南
- ANU PK大楼Studio 1的3D声效和Ambisonic技术体验
- C#实现的鼠标事件功能演示
- 掌握DP-10:LeetCode超级掉蛋与爆破气球
- C与SDL开发的游戏如何编译至WebAssembly平台
- CastorDOC开源应用程序:文档管理功能与Alfresco集成
- LeetCode用例构造与计算机科学基础:数据结构与设计模式
- 通过travis-nightly-builder实现自动化API与Rake任务构建
