平衡车机电控制系统建模与仿真分析
需积分: 10 14 浏览量
更新于2024-08-07
1
收藏 6.75MB PDF 举报
"平衡车机电控制系统建模与仿真.pdf"
这篇文档主要探讨的是平衡车的机电控制系统的设计与仿真,由沈阳建筑大学交通与机械工程学院的学者孙军、万明伦、吕博和王玉玲共同撰写。研究的核心是构建一个能够稳定运行的机电控制系统,通过对系统的数学建模和仿真来优化控制策略。
首先,作者们建立了一个系统结构模型,这是进行后续建模工作的基础。他们采用了拉格朗日方法,这是一种在物理学和工程学中广泛使用的动态系统建模技术,通过考虑系统的动能和势能来建立动力学方程,从而得到系统的数学模型。这个模型能够描述平衡车在各种运动状态下的行为。
然后,研究人员利用LabVIEW(Laboratory Virtual Instrument Engineering Workbench)这一强大的图形化编程环境及其控制与仿真工具包,根据之前建立的数学模型设计了一个状态反馈控制器。LabVIEW是NI公司推出的一种用于创建交互式测量和控制应用程序的软件,非常适合进行复杂的控制系统设计和仿真。
在仿真测试中,当对系统施加0.22弧度的扰动后,平衡车的位置、速度、倾斜角度和角速度在大约3.5秒内都能恢复到平衡状态。这一结果验证了所建立的模型的合理性和控制器的有效性,表明状态反馈控制器能够有效地稳定系统,并对扰动有良好的响应能力。
关键词包括平衡车、数学建模、状态反馈和LabVIEW,表明研究重点集中在这些领域。文档的分类号为TP273.5,通常对应于自动化技术和计算机应用类的科技文献,而文献标识码A则表明这是一篇原创性的科研论文。该研究项目得到了辽宁省自然科学基金的支持。
这篇文档深入地研究了平衡车的机电控制系统,通过数学建模和LabVIEW仿真,设计出了一种能够确保平衡车稳定性的状态反馈控制器。这项工作对于理解和改进平衡车的控制性能,以及推动相关领域的技术发展具有重要意义。
平衡车机电控制系统建模与仿真
孙 军, 万明伦, 吕 博, 王玉玲
( 沈阳建筑大学交通与机械工程学院, 辽宁 沈阳 110168)
M odeling and Sim ulation of M echano- electronic Cont rol Sy stem for Self- balance Vehicle
SUN Jun, WAN Ming- lun, LV Bo, WANG Yu- ling
( Schoo l of T raffic and M echanical Eng ineer ing, Shenyang Jianzhu U niversity , Shenyang 110168, China)
摘要: 构建平衡车机电控制系统, 研究机电控制
系统的建模与仿真设计方法. 在建立系统结构模型
的基础上, 应用拉格朗日( Lag rang e) 方法建立系统
动力学方程和数学模型; 在 L abVIEW 及其控制与
仿真工具包开发环境下, 依据系统的数学模型, 设计
状态反馈控制器. 当施加 0. 22 r ad 扰动时, 平衡车
位置、速度、倾斜角度、角速度都在 3. 5 s 左右回到
了平衡状态, 这表明, 系统建立 的模型是合理 可靠
的, 所设计的状态反馈控制器得到了较好的控制效
果.
关键词: 平衡车; 数学建模; 状态反馈; Lab
V IEW
中图分类号: T P273. 5
文献标识码: A
文章编号: 1001- 2257( 2010) 10- 0034- 04
收稿日期: 2010- 05- 25
基金项目: 辽宁省自然科学基金资助项目( 20092056)
Abstract: T his paper co nstructio ns t he mecha
no- electr onic contr ol system fo r the self- balance
vehicle, and studies the modeling and simulatio n
design m ethods. Base on the syst em str ucture mo d
el, w e used lagr ange met ho d t o establishment the
system kinet ic equat ions and m athemat ical models.
In the development environment of L abVIEW and
its contro l design and sim ulation m odule, according
to the sy st em mathematical mo del, w e desig n t he
state feedback contro ller. As a r esult , w hen adding
a disturbance of 0. 22 r adian, the po sitio n, the ve
locity, the tilt ang le and t he ang ular velocity of t he
self - balance vehicl all ret urn to the equilibrium
state w ithin 3. 5 seconds. It show s that the m odel is
reasonable, and the st at e feedback cont ro ller hav e a
w ell perform ance.
Key words: self- balance v ehicle; m athemat ical
m odeling ; stat e feedback; L abVIEW
0 引言
平衡车是动力学理论和自动控制理论与技术相
结合的研究项目, 平衡车控制系统是一个复杂的、不
稳定的、非线性系统, 平衡车的控制就是使平衡车尽
快地达到一个平衡位置, 并且使之没有大的振荡和
过大的角度和速度; 当平衡车到达期望的位置后, 系
统能克服随机扰动而保持稳定的位置
[ 1- 2]
. 在此通
过对平衡车机电系统的力学分析, 建立数学模型, 推
导出系统的状态方程. 在极点配置的基础上, 利用状
态反馈算法对系统进行控制. 通过 L abVIEW 及其
控制与仿真工具包进行仿真设计, 根据仿真曲线进
行分析, 检验控制算法的控制效果. 通过对平衡车机
电控制系统的数学建模研究, 为实验样机提供合理
可靠的参考数据; 通过仿真设计, 可缩短样机开发时
间, 提高开发效率.
1 系统构成
1. 1 机械结构
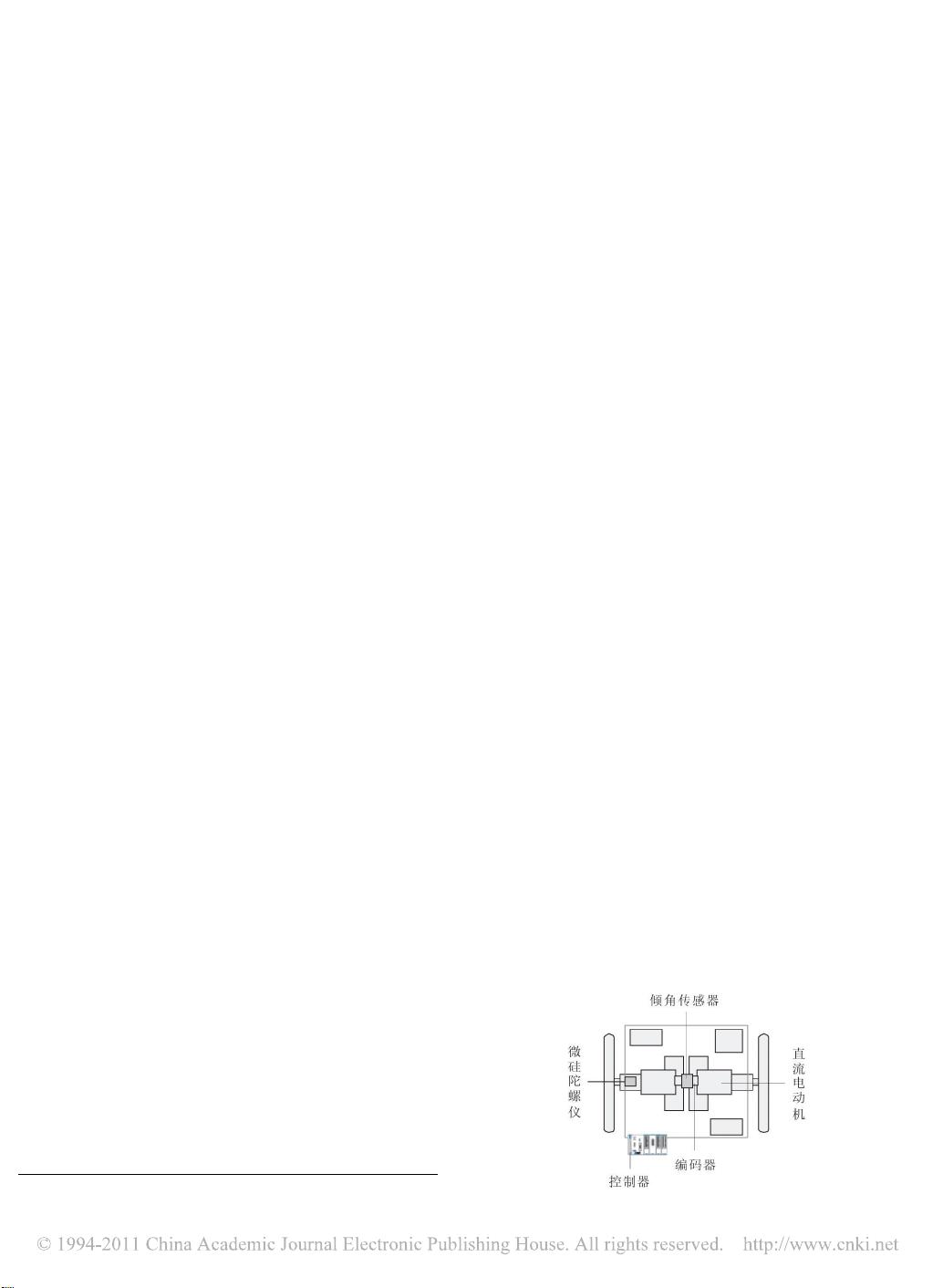
平衡车机械外型结构如图 1 所示. 它是一个两
轮同轴, 左右平行布置结构, 两轮分别驱动, 车身中
心位于车轮轴上方, 通过控制两轮的转速差实现直
图 1 系统结构
34
机械与电子 2010( 10)
下载后可阅读完整内容,剩余3页未读,立即下载
2021-10-31 上传
136 浏览量
131 浏览量
454 浏览量
216 浏览量
2025-02-18 上传
188 浏览量
238 浏览量
2025-02-20 上传

勇往直前的进击
- 粉丝: 1117
 我的内容管理
展开
我的内容管理
展开







最新资源
- 计算机组成原理期末试题及答案(2011参考)
- 均值漂移算法深入解析及实践应用
- 掌握npm与yarn在React和pg库中的使用
- C++开发学生信息管理系统实现多功能查询
- 深入解析SIMATIC NET OPC服务器与PLC的S7连接技术
- 离心式水泵原理与Matlab仿真教程
- 实现JS星级评论打分与滑动提示效果
- VB.NET图书馆管理系统源码及程序发布
- C#实现程序A监控与自动启动机制
- 构建简易Android拨号功能的应用开发教程
- HTML技术在在线杂志中的应用
- 网页开发中的实用树形菜单插件应用
- 高压水清洗技术在储罐维修中的关键应用
- 流量计校正方法及操作指南
- WinCE系统下SD卡磁盘性能测试工具及代码解析
- ASP.NET学生管理系统的源码与数据库教程
