线性代数解析:SVD的几何意义与应用
需积分: 0 110 浏览量
更新于2024-08-05
1
收藏 677KB PDF 举报
"中文翻译《Introduction to Linear Algebra》第五版第7.4节,介绍线性代数中的奇异值分解(Singular Value Decomposition, SVD)及其几何意义,包括矩阵的范数、极分解和伪逆等概念。"
在本章节中,作者详细探讨了线性代数中的一项重要工具——奇异值分解。SVD是一种将任意矩阵分解为三个矩阵的乘积:一个正交矩阵U、一个对角矩阵Σ和另一个正交矩阵V的转置,即A = UΣV^T。这种分解在多种应用中都有重要作用,例如在数据压缩、图像处理和机器学习等领域。
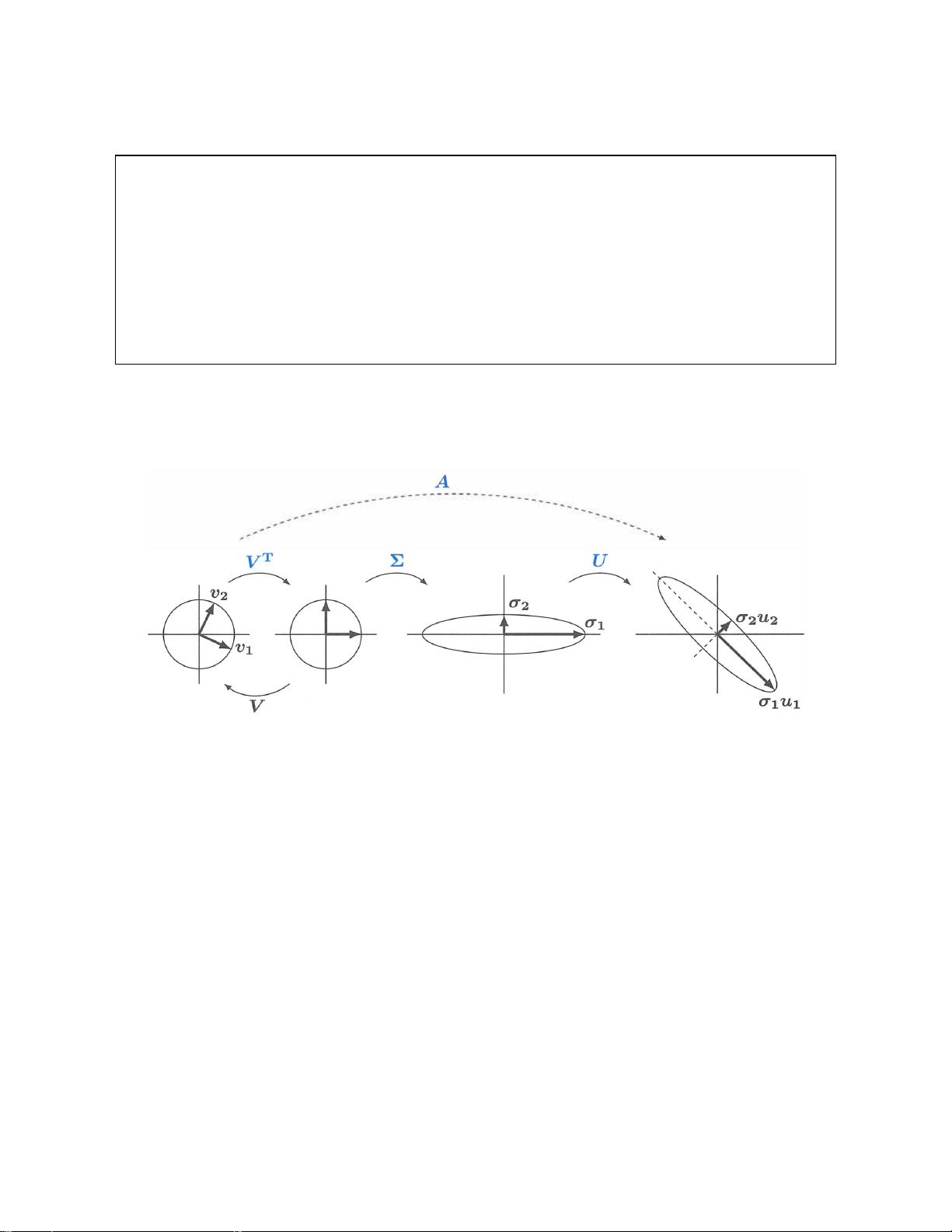
1. 奇异值分解的几何解释:SVD揭示了矩阵A如何通过一系列的几何变换作用于向量。首先,正交矩阵U执行一次旋转,接着对角矩阵Σ进行拉伸(或收缩),最后正交矩阵V^T再进行一次旋转。这个过程将单位圆上的向量映射到椭圆上,展示了矩阵A对向量空间的非线性变换。
2. 矩阵的范数:矩阵A的范数定义为最大增长因子,即所有可能向量x经过A变换后的最大长度比值。这个最大值由对角矩阵Σ的第一个非零元素σ1给出,也就是σ1 = max{∥Ax∥/∥x∥ | x ≠ 0}。σ1反映了矩阵A的影响力和伸缩程度。
3. 极分解:极分解是将矩阵A分解为正交矩阵Q和正定对角矩阵S的乘积,即A = QS。这里的Q代表旋转,而S代表拉伸,这样的分解有助于理解和简化矩阵运算。
4. 伪逆:对于非满秩矩阵A,其伪逆A+可以将列空间中的向量Ax映射回行空间中的向量x。伪逆A+可以通过V、Σ和U的组合得到,具体为A+ = VΣ+U^T。这对于解决最小二乘问题和其他逆运算场景非常有用。
5. SVD的三步分解:SVD将矩阵A分解为U、Σ和V^T,其中U和V是正交矩阵,Σ是对角矩阵。这种分解直观地表达了(旋转)×(拉伸)×(旋转)的过程,对向量进行连续变换。
在2×2矩阵的特殊情况下,U和V可以视为旋转矩阵,但可能也包含反射。如果U、V和A的行列式都大于0,那么A是可逆的,因为SVD的三步过程揭示了逆矩阵的存在。
这些概念和操作在现代数学和工程中具有广泛的应用,特别是在处理高维数据和线性系统时。SVD不仅提供了矩阵分析的深刻理解,也是许多数值方法和算法的基础,如PCA(主成分分析)和最小二乘估计。了解并掌握SVD的几何意义和计算性质对于深入理解线性代数至关重要。
7.4 SVD 的几何
1 一个典型的方阵 A = UΣV
T
分解为 (旋转)(拉伸)(旋转)。
2 几何展示了 A 如何将圆上的向量变换为椭圆上的向量 Ax。
3 A 的范数是 ∥A∥ = σ
1
。这个奇异值是它的最大增长因子 ∥Ax∥/ ∥x∥。
4 极分解将 A 分解成 QS:旋转 Q = UV
T
乘上拉伸 S = V ΣV
T
。
5 伪逆 A
+
= V Σ
+
U
T
使列空间中的 Ax 还原到行空间中的 x。
SVD 将一个矩阵分成三步:(正交矩阵) × (对角矩阵) × (正交矩阵)。普通的言语就能表达其背后的几
何:(旋转) × (拉伸) × (旋转)。UΣV
T
x 从旋转到 V
T
x 开始。其次 Σ 将向量拉伸到 ΣV
T
x,然后 U
将其旋转至 Ax = UΣV
T
x。以下是其图像。
图 7.5:U 和 V 是旋转矩阵也可能是反射矩阵。Σ 将圆拉伸成椭圆。
诚然,这个图只适用于 2 ×2 矩阵。还不是每个 2 ×2 矩阵,因为 U 和 V 没有虑及反射矩阵——
全部三个矩阵的行列式都 > 0。此 A 必定可逆,因为这三步表明了是可逆的:
"
a b
c d
#
=
"
cos θ −sin θ
sin θ cos θ
#"
σ
1
σ
2
#"
cos ϕ sin ϕ
−sin ϕ cos ϕ
#
= UΣV
T
. (1)
矩阵 A 中的四个数 a, b, c, d 产生了 SVD 中的四个数 θ, σ
1
, σ
2
, ϕ。
这个图将引导我们至矩阵代数的三个简洁思想:
1 矩阵的范数 ∥A∥——它是最大增长因子。
2 极分解 A = QS——正交 Q 乘以正定 S。
3 伪逆 A
+
——矩阵 A 不可逆时的最佳逆。
请勿商业交易!仅交流学习! 邮箱:youth_eric@163.com 微信号:tengxunweixin_id
下载后可阅读完整内容,剩余5页未读,立即下载
2022-04-27 上传
2023-02-05 上传
2022-08-17 上传
2022-09-06 上传
2022-11-10 上传
219 浏览量
2022-03-14 上传
2022-03-31 上传

Eric_Saltfish
- 粉丝: 158
- 资源: 31
 我的内容管理
展开
我的内容管理
展开







最新资源
- 全国江河水系图层shp文件包下载
- 点云二值化测试数据集的详细解读
- JDiskCat:跨平台开源磁盘目录工具
- 加密FS模块:实现动态文件加密的Node.js包
- 宠物小精灵记忆配对游戏:强化你的命名记忆
- React入门教程:创建React应用与脚本使用指南
- Linux和Unix文件标记解决方案:贝岭的matlab代码
- Unity射击游戏UI套件:支持C#与多种屏幕布局
- MapboxGL Draw自定义模式:高效切割多边形方法
- C语言课程设计:计算机程序编辑语言的应用与优势
- 吴恩达课程手写实现Python优化器和网络模型
- PFT_2019项目:ft_printf测试器的新版测试规范
- MySQL数据库备份Shell脚本使用指南
- Ohbug扩展实现屏幕录像功能
- Ember CLI 插件:ember-cli-i18n-lazy-lookup 实现高效国际化
- Wireshark网络调试工具:中文支持的网口发包与分析
