深度学习驱动的自动驾驶技术现状分析
需积分: 50 48 浏览量
更新于2024-07-15
1
收藏 2.03MB PDF 举报
“《深度学习自动驾驶》技术综述论文,由Yu Huang和Yue Chen撰写,探讨了自动驾驶领域的最新技术,特别是在深度学习方法的应用上。该文涵盖了感知、建图与定位、预测、规划与控制、仿真、V2X通信以及安全等多个关键领域。”
深度学习在自动驾驶中的应用已经成为当前AI研究的热点,自DARPA的挑战赛以来,这个领域的发展迅速且活跃。深度学习的三位先驱——Hinton、Bengio和LeCun因他们的突破性贡献获得了2019年ACM图灵奖。这篇综述文章深入分析了深度学习在自动驾驶系统中的核心应用。
1. 感知:2D/3D对象检测是感知的关键,深度学习模型如Faster R-CNN、YOLO和PointPillars等用于识别车辆、行人、交通标志等,提供实时环境理解。
2. 建图与定位:深度学习用于从多传感器数据(如LiDAR和相机)中估计高精度的三维环境地图,同时通过SLAM(Simultaneous Localization and Mapping)算法实现车辆的精确定位。
3. 预测:深度学习模型,如LSTM和Transformer,用于建模和预测其他道路使用者的行为,这对于安全驾驶至关重要。
4. 规划与控制:深度强化学习(DQN, A3C等)在路径规划和车辆控制中发挥着作用,使车辆能够根据环境变化做出最优决策。
5. 仿真:深度学习也被应用于构建逼真的驾驶模拟器,如AirSim和CARLA,这些模拟器能够生成大量训练数据,加速算法的开发和验证。
6. V2X通信:车辆到一切(V2X)通信利用深度学习处理大量的无线通信数据,实现车车、车路之间的信息交换,提高自动驾驶的安全性和效率。
7. 安全性:深度学习模型的鲁棒性和安全性是关注的重点,研究者正在探索对抗性训练和模型解释性方法来增强模型的稳定性和可解释性。
这篇综述论文详细阐述了这些领域的最新进展,展示了深度学习如何推动自动驾驶技术的进步,并为未来的研发提供了方向。尽管深度学习带来了显著的提升,但仍然面临数据需求大、计算资源消耗高、实时性挑战等问题,这些问题将继续引导研究人员探索更高效、更智能的解决方案。
reconstruction (depth) and sensor fusion, while mentioning
other fields as image processing (denoising and super-
resolution), segmentation, motion estimation, tracking and
human pose estimation (used for pedestrian movement
analysis). The detection part is split into 2-D and 3-D. The 3-D
method is classified as camera-based, LiDAR-based, radar-
based and sensor fusion-based. Similarly, depth estimation is
categorized as monocular image-based, stereo-based and sensor
fusion-based.
A. Image Processing
Image quality and resolution are requested in the perception.
The existing denoising methods can fall into end-to-end CNN
and combination of CCN with prior knowledge. A survey of
image denoising by deep learning is given in [60].
The super-resolution methods based on deep learning can be
roughly categorized into supervised and unsupervised. The
supervised manner is split into pre-upsampling, post-
upsampling, progressive-upsampling and iterative up-and-
down sampling. The unsupervised manner could be zero-shot
learning, weak supervised and prior knowledge-based. An
overview of image super-resolution refers to [59].
B. 2-D Detection
There are good survey papers in this domain [76, 77]. Here we
only briefly introduce some important methods in the short
history.
The object detection by deep learning are roughly named as
one-stage and two-stage methods. The first two stage method
is R-CNN (region-based) [61] with feature extraction by CNN;
fast R-CNN [63] improves it with SPP (spatial pyramid
pooling) [62] layers that generate a fixed-length representation
without rescaling; faster RCNN [64] realizes end-to-end
detection with the introduced RPN (region proposal network);
FPN (feature pyramid network) [67] proposes a top-down
architecture with lateral connections to build the feature
pyramid for detection with a wide variety of scales; a GAN
version of fast RCNN is achieved [69].
YOLO (You Only Look Once) is the first one-stage detector in
deep learning era, which divides the image into regions and
predicts bounding boxes and probabilities for each region
simultaneously [66]. SSD (single shot detector) was the second
one-stage detector with the introduction of the multi-reference
and multi-resolution [65], which can detect objects of different
scales on different layers of the network. PeleeNet [72] is used
for detection as the SSD backbone, a combination of DenseNet
and MobileNet.
YOLO already has 4 versions [68, 70-71, 75], which further
improve the detection accuracy while keeps a very high
detection speed:
• YOLO v2[68] replaces dropout and VGG Net with BN and
GoogleNet respectively, introduces anchor boxes as prior
in training, takes images with different sizes by removing
fully connected layers, apply DarkNet for acceleration and
WordTree for 9000 classes in object detection;
• YOLO v3 [71] uses multi-label classification, replaces the
softmax function with independent logistic classifiers,
applies feature pyramid like FPN, replace DarkNet-19 with
DarkNet-53 (skip connection);
• YOLO v4 [75] uses Weighted-Residual-Connections
(WRC) and Cross-Stage-Partial-Connections (CSP), takes
Mish-activation, DropBlock regularization and Cross
mini-Batch Normalization (CmBN), runs Self-adversarial-
training (SAT) and Mosaic data augmentation in training,
and CIoU loss in bounding box regression.
RetinaNet is a method with a new loss function named “focal
loss” to handle the extreme foreground-background class
imbalance [70]. Focal Loss enables the one-stage detectors to
achieve comparable accuracy of two-stage detectors while
maintaining very high detection speed. VoVNet [73] is another
variation of DenseNet comprised of One-Shot Aggregation
(OSA) applied for both one-stage and two-stage efficient object
detection. EfficientDet [74] applies a weighted bi-directional
FPN (BiFPN) and EfficientNet backbones.
Recently anchor-free methods get more noticed due to the
proposal of FPN and Focal Loss [78-90]. Anchors are
introduced to refine to the final detection location, first occurred
in SSD, then in faster R-CNN and YOLO v2. The anchors are
defined as the grid on the image coordinates at all possible
locations, with different scale and aspect ratio. However, it is
found fewer anchors result in better speed but deteriorate the
accuracy.
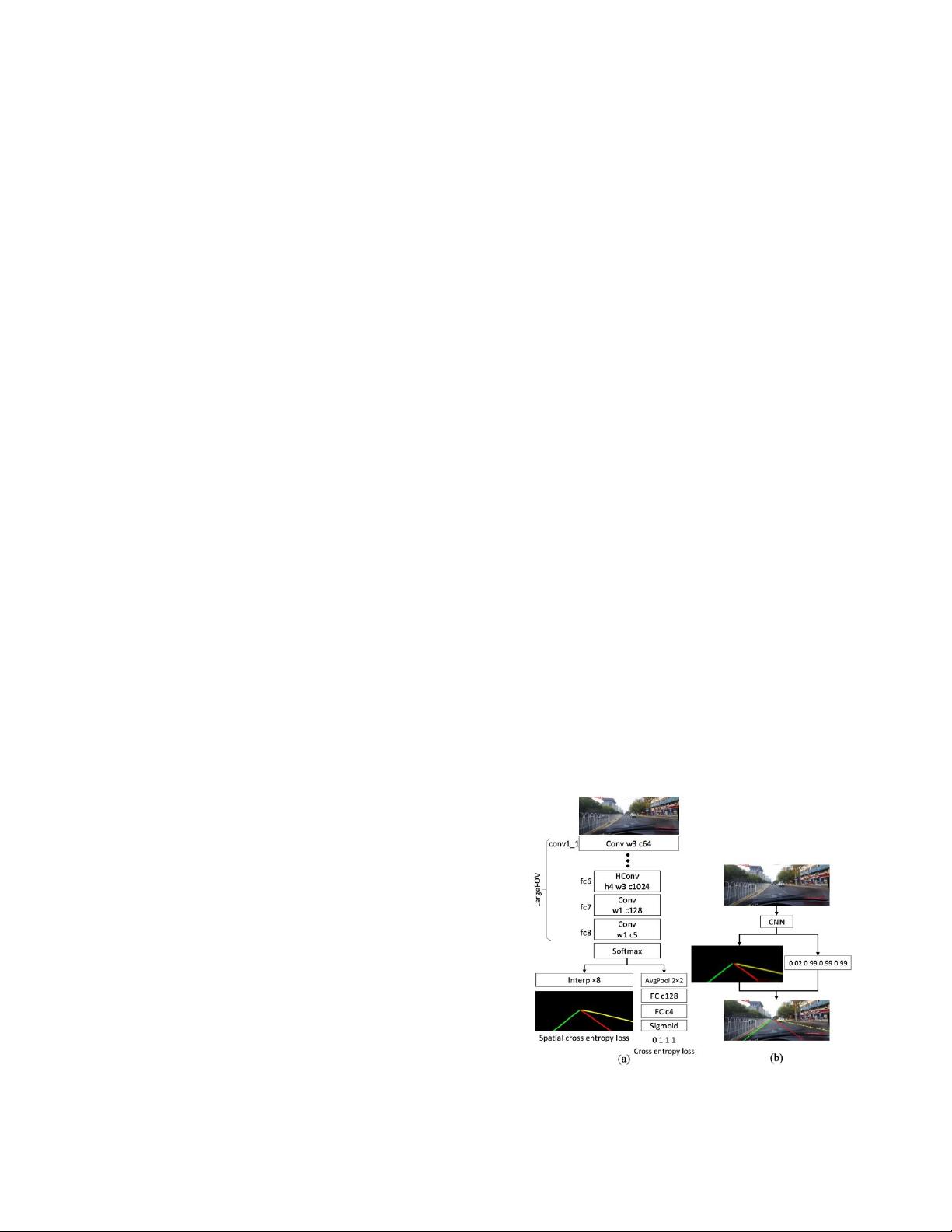
Fig. 5. Spatial CNN for lane detection, from reference [94].
剩余27页未读,继续阅读
111 浏览量
456 浏览量
点击了解资源详情
3300 浏览量
1856 浏览量
514 浏览量
343 浏览量
869 浏览量
107 浏览量

syp_net
- 粉丝: 158
 我的内容管理
展开
我的内容管理
展开







最新资源
- 网页自动刷新工具 v1.1 - 自定义时间间隔与关机
- pt-1.4协程源码深度解析
- EP4CE6E22C8芯片三相正弦波发生器设计与实现
- 高效处理超大XML文件的查看工具介绍
- 64K极限挑战:国际程序设计大赛优秀3D作品展
- ENVI软件全面应用教程指南
- 学生档案管理系统设计与开发
- 网络伪书:社区驱动的在线音乐制图平台
- Lettuce 5.0.3中文API文档完整包下载指南
- 雅虎通Yahoo! Messenger v0.8.115即时聊天功能详解
- 将Android手机转变为IP监控摄像机
- PLSQL入门教程:变量声明与程序交互
- 掌握.NET三层架构:实例学习与源码解析
- WPF中Devexpress GridControl分组功能实例分析
- H3Viewer: VS2010专用高效帮助文档查看工具
- STM32CubeMX LED与按键初始化及外部中断处理教程
