投影机-摄像机标定:简单、精确且鲁棒的方法
需积分: 42 143 浏览量
更新于2024-09-08
收藏 4.63MB PDF 举报
"Simple, Accurate, and Robust Projector-Camera Calibration" 论文主要探讨了投影机-摄像机标定技术,这是构建结构光系统的关键步骤,这种系统广泛用于获取三维模型。作者 Daniel Moreno 和 Gabriel Taubin 来自布朗大学工程学院,他们提出了一种新颖的方法来提高标定的精度和鲁棒性。
传统的摄像机标定方法已经相当成熟,但投影机的标定却相对复杂,尽管两者都可以用相同的数学模型来描述,但直接将相机标定方法应用于投影机并不理想。许多现有的投影机标定技术会简化模型,忽视镜头畸变,导致精度下降。
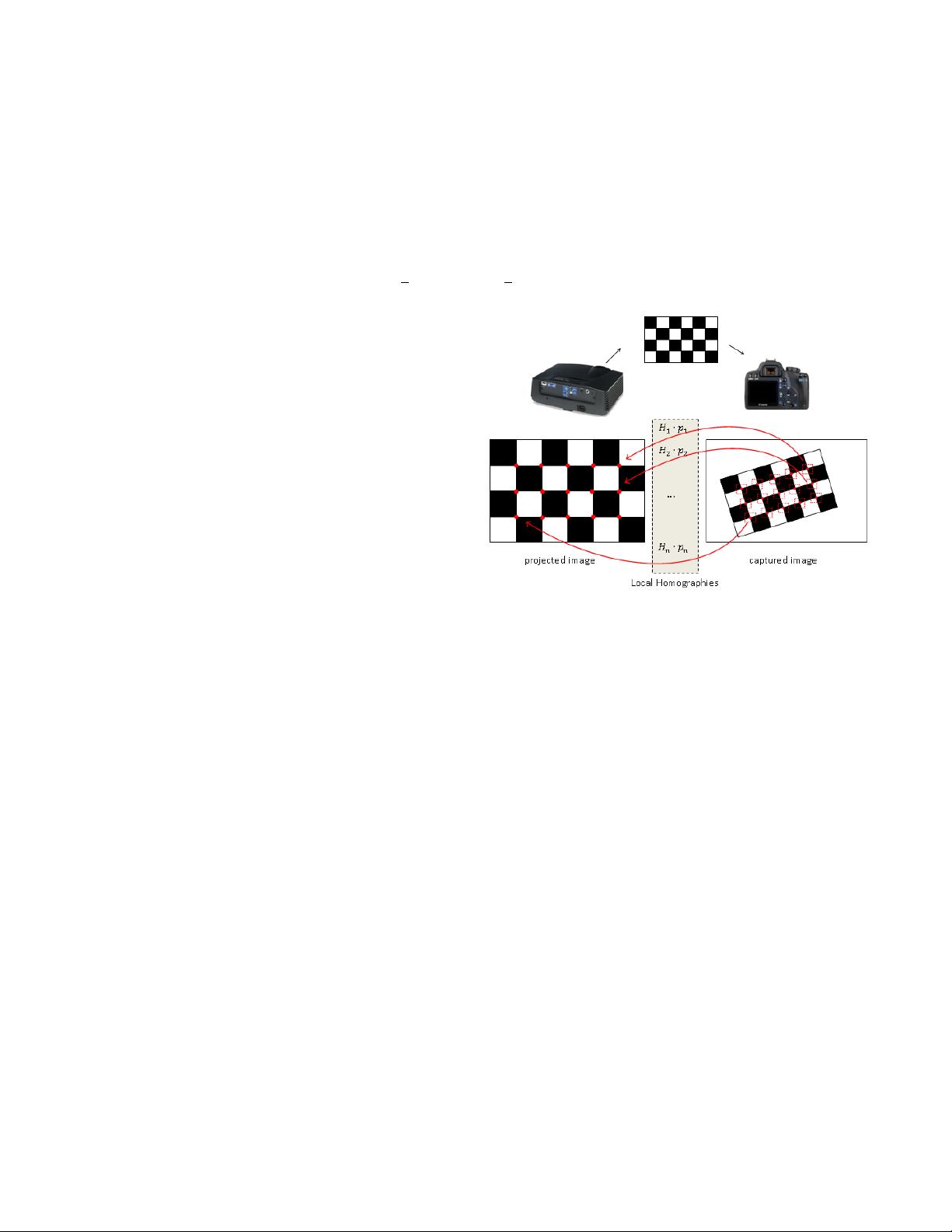
论文的核心在于提出了一种新的方法,该方法能够估计投影机图像平面上3D点的图像坐标。这个方法依赖于未标定的相机,并利用局部仿射变换(局部 Homography)来实现亚像素级别的精度。通过这种方法,可以克服传统投影机标定中的简化模型带来的精度损失,从而提高整个系统在3D重建中的性能。
局部仿射变换是一种强大的几何模型,它考虑了图像局部区域内的线性变换,对于校正由于镜头畸变造成的图像失真非常有效。在投影机-摄像机标定中,这种技术的应用可以更精确地匹配投影图像和捕获的图像,从而提高3D重建的精度。
此外,该方法的鲁棒性也是其亮点之一。在实际应用中,环境因素和设备的不稳定性可能导致标定过程中的误差。论文提出的算法能够在这些不确定性和噪声中保持稳定,确保标定结果的可靠性。
这篇论文提供了一个创新的解决方案,解决了投影机标定的难题,提高了结构光系统的整体性能,对于3D建模和计算机视觉领域的研究者以及实践者来说,具有很高的参考价值。
Simple, Accurate, and Robust Projector-Camera Calibration
Daniel Moreno and Gabriel Taubin
School of Engineering
Brown University
Providence, RI, USA
Email: {daniel moreno,gabriel taubin}@brown.edu
Abstract—Structured-light systems are simple and effective
tools to acquire 3D models. Built with off-the-shelf components,
a data projector and a camera, they are easy to deploy and
compare in precision with expensive laser scanners. But such
a high precision is only possible if camera and projector are
both accurately calibrated. Robust calibration methods are well
established for cameras but, while cameras and projectors can
both be described with the same mathematical model, it is not
clear how to adapt these methods to projectors. In consequence,
many of the proposed projector calibration techniques make
use of a simplified model, neglecting lens distortion, resulting
in loss of precision. In this paper, we present a novel method
to estimate the image coordinates of 3D points in the projector
image plane. The method relies on an uncalibrated camera and
makes use of local homographies to reach sub-pixel precision.
As a result, any camera model can be used to describe the
projector, including the extended pinhole model with radial
and tangential distortion coefficients, or even those with more
complex lens distortion models.
Keywords-structured-light; camera; projector; calibration;
local homography;
I. INTRODUCTION
Structured-light systems are the preferred choice for do-it-
yourself 3D scanning applications. They are easy to deploy,
only an off-the-shelf data projector and camera are required,
and they are very accurate when implemented carefully. A
projector-camera pair works as a stereo system, with the
advantage that a properly chosen projected pattern simplifies
the task of finding point correspondences. In such systems,
projectors are modeled as inverse cameras and all consid-
erations known for passive stereo systems may be applied
with almost no change. However, the calibration procedure
must be adapted to the fact that projectors cannot directly
measure the pixel coordinates of 3D points projected onto
the projector image plane as cameras do.
Viewpoint, zoom, focus, and other parameters ought to be
adjusted, both in projector and camera, to match each target
object size and scanning distance; invalidating any previous
calibration. Therefore, structured-light systems must be cali-
brated before each use in order to guaranteed the best result,
turning the calibration procedure simplicity as valuable as
its precision. In this paper, we present a new calibration
procedure for structured-light systems that is both very easy
to perform and highly accurate.
Figure 1. Structured-light system calibration
The key idea of our method is to estimate the coordinates
of the calibration points in the projector image plane using
local homographies. First, a dense set of correspondences
between projector and camera pixels is found by projecting
onto the calibration object identical pattern sequence as the
one later projected to scan the target, reusing most of the
software components written for the scanning application.
Second, the set of correspondences is used to compute a
group of local homographies that allow to find the projection
of any of the points in the calibration object onto the
projector image plane with sub-pixel precision. In the end,
the data projector is calibrated as a normal camera.
Our main contribution is a method for finding correspon-
dences between projector pixels and 3D world points. Once
those correspondences are known any calibration technique
available for passive stereo can be applied directly to the
structured-light system. Our method does not rely on the
camera calibration parameters to find the set of correspon-
dences. As a result, the projector calibration is not affected
in any way by the accuracy of the camera calibration.
We show, as a second contribution, that the proposed
calibration method can be implemented in such a way that no
user intervention is necessary after data acquisition, making
the procedure effective even for unexperienced users. To
下载后可阅读完整内容,剩余7页未读,立即下载
151 浏览量
675 浏览量
243 浏览量
2021-02-11 上传
2021-01-27 上传
354 浏览量
2023-08-21 上传
2021-02-05 上传

soloforce
- 粉丝: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- VB通过Modbus协议控制三菱PLC通讯实操指南
- simfinapi:R语言中简化SimFin数据获取与分析的包
- LabVIEW温度控制上位机程序开发指南
- 西门子工业网络通信实例解析与CP243-1应用
- 清华紫光全能王V9.1软件深度体验与功能解析
- VB实现Access数据库数据同步操作指南
- VB实现MSChart绘制实时监控曲线
- VC6.0通过实例深入访问Excel文件技巧
- 自动机可视化工具:编程语言与正则表达式的图形化解释
- 赛义德·莫比尼:揭秘其开创性技术成果
- 微信小程序开发教程:如何实现模仿ofo共享单车应用
- TrueTable在Windows10 64位及CAD2007中的完美适配
- 图解Win7搭建IIS7+PHP+MySQL+phpMyAdmin教程
- C#与LabVIEW联合采集NI设备的电压电流信号并创建Excel文件
- LP1800-3最小系统官方资料压缩包
- Linksys WUSB54GG无线网卡驱动程序下载指南
