MATLAB单相机标定全流程指南:步骤与精度优化
MATLAB单相机校准是一个重要的计算机视觉技术,用于估计相机的内在参数、外在参数以及镜头畸变系数。这项任务在各种应用场景中至关重要,例如图像矫正、平面物体测量和多摄像头三维重建等。通过遵循特定的工作流程,用户可以确保相机标定的准确性。
工作流程主要包括以下步骤:
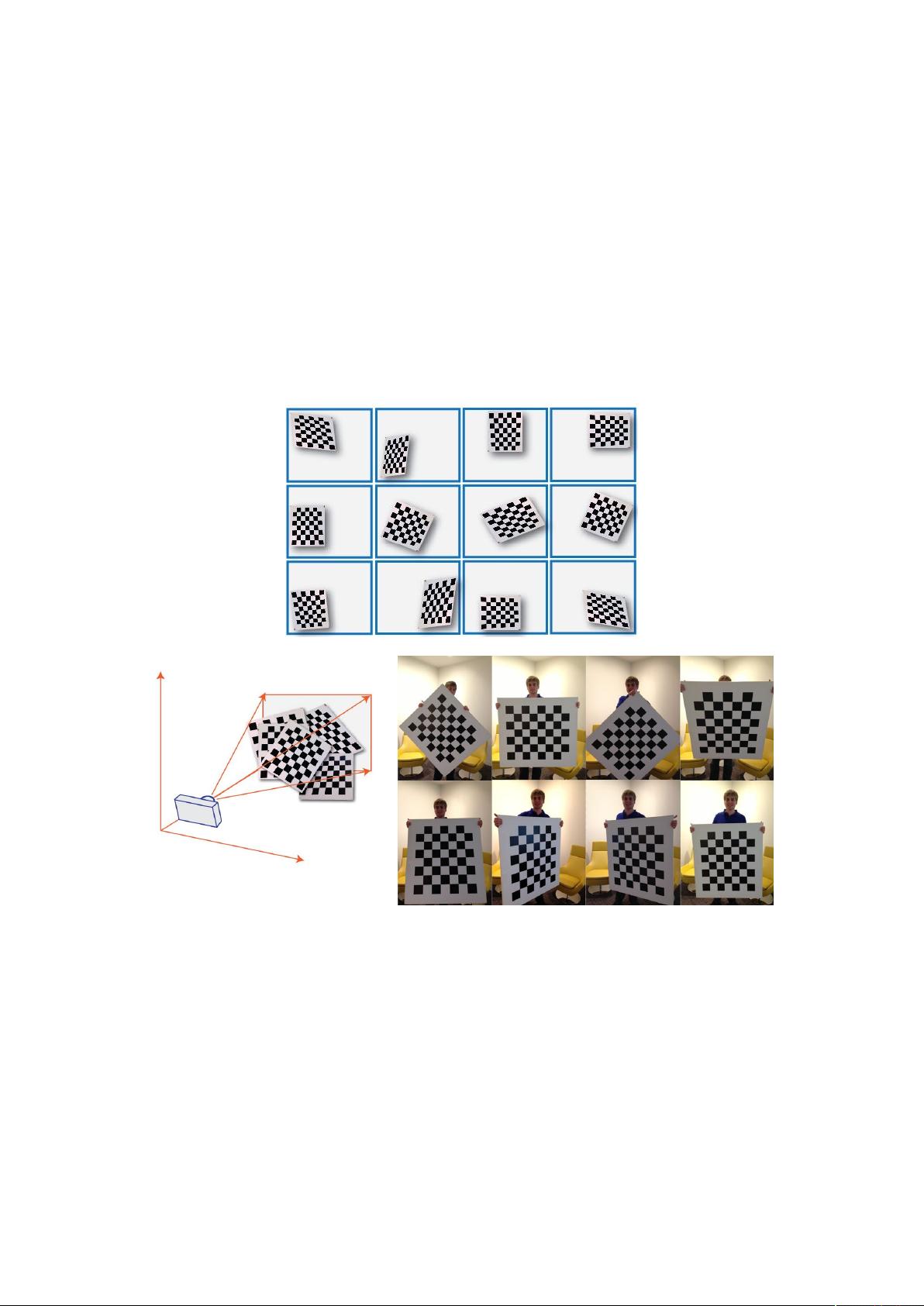
1. 准备阶段:确保有足够的高质量图片,其中包含一张或多张标定板。标定板应是专用的棋盘样式,具有明显的黑白相间的方格,且长边与x轴相对。建议使用10到20张图片以提高精度,且图像应保持清晰,无背景干扰。
2. 图片加载:在MATLAB环境中,通过Toolstrip打开Camera Calibrator应用程序,或通过命令提示符输入`cameraCalibrator`调用该工具。
3. 相机校准:导入图片后,开始校准过程。MATLAB提供了一系列的几何相机校准函数,这些函数会帮助分析图片中的特征点,识别标定板并计算相应的参数。
4. 精度评估:校准完成后,评估校准结果的准确度。如果满足要求,无需进一步调整;若需提升,可以通过调整参数优化校准过程。
5. 输出参数:最后,生成包含校准参数的对象,这些参数可以用于后续的计算机视觉应用,如图像去畸变、深度估计或立体视觉。
6. 参数调整:对于特定应用场景,可能需要根据实际需求调整参数,比如调整内参矩阵、畸变系数等,以提高处理性能。
值得注意的是,标定板的设置和相机的使用对结果有直接影响。确保相机保持固定距离和角度拍摄,避免图像变形,并在可能的情况下使用手动对焦。同时,标定板的尺寸和布局也必须符合特定的规格,以保证标定程序的正确执行。
MATLAB的单相机校准是一个细致而关键的过程,它涉及到图像处理技术、数学模型和实际硬件操作的结合,对于高质量的计算机视觉应用来说,是一个基础且必要的步骤。
为达到最佳效果,使用至少 10 到 20 的包含标定板的图像。标定 APP 至少需要三个图像。 使用未压缩的图
像或图像无损压缩格式如 PNG。为了提高标定精度:
1. 捕获的图像模式大约距离等于距离你的相机感兴趣的对象。 例如,如果您计划从 2 米测量对象,保持你
的从相机模式大约 2 米。
2. 把棋盘角度小于 45 度相对于相机平面。
3. 不要修改图片。例如,没有裁剪他们。
4. 不使用自动对焦或缩放图像。
5. 在相对于相机不同位置捕获的图像 棋盘状图案。
6. 捕获足够的不同模式的图像,你已经覆盖尽可能多的图像帧。 在图像边缘镜头畸变会快速增加增加。
为了捕捉这些透镜畸变, 该标定板必须出现接近边缘的位置。
作为一般规则,棋盘标定板应该填补至少 20%的捕获的图像。例如, 前面的图片拍摄的棋盘方块的大小为
108 毫米。
添加图片
开始校准,必须添加图片。您可以添加保存好的图像从一个文件夹或直接从相机
添加图片。程序自动分析了图像,以确保它们满足标定的要求然后检测角点。
从文件夹添加图片
剩余13页未读,继续阅读
点击了解资源详情
134 浏览量
点击了解资源详情
888 浏览量
185 浏览量
144 浏览量
2024-06-02 上传
点击了解资源详情
点击了解资源详情

坚持奋斗的李洛克
- 粉丝: 166
 我的内容管理
展开
我的内容管理
展开







最新资源
- Web远程教学系统需求分析指南
- 禅道6.2版本发布,优化测试流程,提高安全性
- Netty传输层API中文文档及资源包免费下载
- 超凡搜索:引领搜索领域的创新神器
- JavaWeb租房系统实现与代码参考指南
- 老冀文章编辑工具v1.8:文章编辑的自动化解决方案
- MovieLens 1m数据集深度解析:数据库设计与电影属性
- TypeScript实现tca-flip-coins模拟硬币翻转算法
- Directshow实现多路视频采集与传输技术
- 百度editor实现无限制附件上传功能
- C语言二级上机模拟题与VC6.0完整版
- A*算法解决八数码问题:AI领域的经典案例
- Android版SeetaFace JNI程序实现人脸检测与对齐
- 热交换器效率提升技术手册
- WinCE平台CPU占用率精确测试工具介绍
- JavaScript实现的压缩包子算法解读
