轴线测量法提升6自由度串联机器人精度:参数辨识与标定
需积分: 25 193 浏览量
更新于2024-08-28
6
收藏 585KB PDF 举报
本文主要探讨了6自由度串联机器人的D-H模型参数辨识与标定技术,这对提高机器人末端的绝对精度至关重要。首先,作者提出了一种创新的方法,即通过轴线测量法来识别机器人D-H参数模型。轴线测量法是一种实践性强且直观的测量方法,它利用实际测量数据代替传统的理论建模,减少了对机器人内部结构复杂性的依赖,提高了参数估计的准确性。
在D-H参数识别的基础上,作者将这些参数转化为了最小完整连续运动学(CMMK)模型参数。最小完整连续运动学模型是机械工程中的一个重要概念,它能够确保机器人运动的连续性和完整性,有助于克服D-H模型中存在的奇异性和冗余问题。通过非线性优化技术,解决了模型在参数化过程中可能出现的非线性优化难题,使得参数估计更加稳定和精确。
接着,优化后的CMMK模型参数被进一步转化为工业标准的D-H模型参数,这一步对于实际应用中的设计和控制至关重要。通过补偿过程,能够确保得到的参数模型具有更高的精度,从而显著提升机器人的定位精度。未经标定时,MOTOMAN-MH80机器人的位置误差约为2mm,而经过标定后,这一精度得到了显著提升,下降至0.7mm,提升了大约70%。
相比于传统的运动学回路法,本文的方法具有更高的通用性,因为它不依赖于复杂的理论建模,而是直接从实际测量数据出发。同时,最小完整连续运动学模型的使用使得标定过程更为稳健,避免了由于模型复杂性导致的优化困难。
总结来说,本文提供了一种实用且高效的6自由度串联机器人D-H模型参数辨识与标定方法,通过实际测量和优化策略,显著提高了机器人定位精度,对提高机器人在精密制造、自动化等领域中的应用性能具有重要意义。
362 机 器 人 2016 年 5 月
射关系,因此在进行参数标定前需要获取关节脉冲
和角度的映射关系,可表示为
y = kx + b (1)
因此,标定关节脉冲量和角度值的映射关系需
要获取 2 个信息:
(1) 各关节脉冲零位和参数模型的关节角度偏
置的对应关系即 b,可以通过机器人脉冲零位时的
手臂姿态获得.
(2) 脉冲数同单位角度的比例关系即 k,由于机
器人末端位姿的旋量通常是以欧拉角的方式表示,
很难直观地看出脉冲变化与角度变化的关系,所以
本文用计算相对姿态的方法获取脉冲和角度对应关
系:选定某个位姿为初始位姿,设该位姿的旋量为
R
R
R
0
,平移量为 t
t
t
0
,对应的待标定轴脉冲为 p
0
,多次
改变该轴脉冲量使机器人运动到不同位姿,计算每
个位姿相对初始位姿的脉冲数 p
i0
= p
i
−p
0
,并计算
姿态变换矩阵如下:
0
i
R
R
RT
T
T =
0
i
R
R
R
0
i
t
t
t
0 1
=
R
R
R
0
t
t
t
0
0 1
−1
R
R
R
i
t
t
t
i
0 1
=
R
R
R
T
0
R
R
R
i
R
R
R
T
0
t
t
t
i
−R
R
R
T
0
t
t
t
0
0 1
(2)
对 上 述
0
i
R
R
RT
T
T 的 姿 态 信 息 进 行 Rodrigues 变
换
[14]
,计算旋转向量 v
v
v
i
,旋转角
θ
i
:
θ
i
=
∥
v
v
v
i
∥
=
R
R
R
Rodrigues
(R
R
R
T
0
R
R
R
i
)
(3)
则
θ
i
即为脉冲变化量 p
i0
对应的角度变化值,则可
得 k =
n
i=1
(p
i0
/
θ
i
). 式中R
R
R
Rodrigues
(·) 表示 Rodrigues
变换操作.
2.2 轴线测量法辨识机器人模型参数
机器人建模是进行机器人标定的第 1 步,本文
沿用 D-H 参数建模方式建立机器人模型.
i
1
䖤
θ
i
z
i
1
y
i
1
x
i
1
a
i
α
i
x
i
z
i
d
i
i
䖤
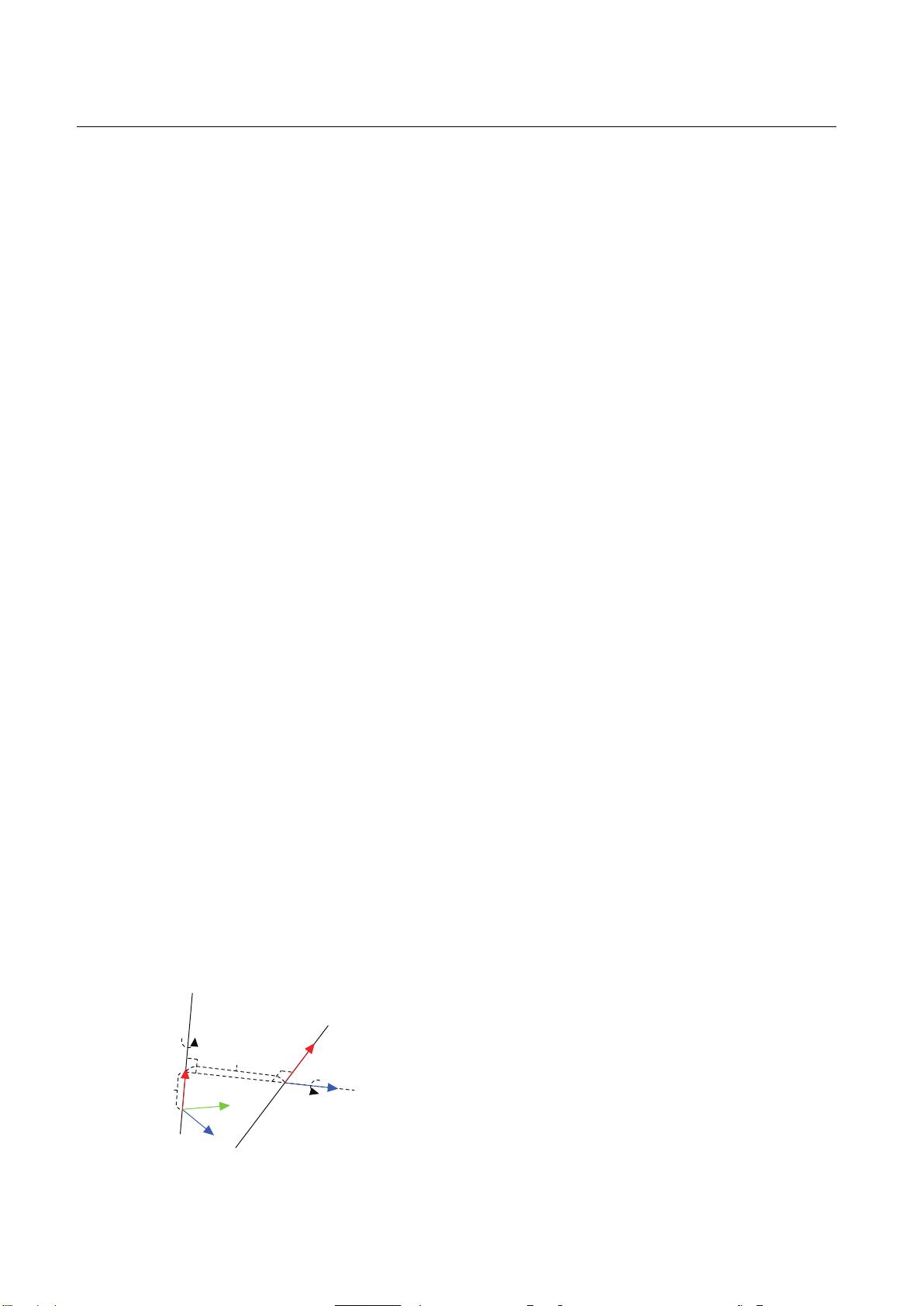
图 2 关节轴不平行时的杆件坐标系确定方式
Fig.2 How to set up the coordinate frames of a link with axis of
joints unparallel
如图 2 所示,i 号杆件两端的关节轴分别为 i−1
轴和 i 轴,根据 D-H 模型规则,由 i −1 轴和 i 轴可
确定 i 号杆件坐标系(i),方法如下:i 号杆件的 z
轴同 i 轴共线,指向同 i 轴旋转的正方向相同;坐
标系原点为 i −1 轴和 i 轴公垂线与 i 轴的交点;x
轴和公垂线共线,方向由 i −1 轴指向 i 轴;y 轴按
右手法则确定.因此,从杆件坐标系(i −1)变换
到杆件坐标系(i)只需要经过 4 个子变换,绕 z
i−1
轴旋转
θ
i
、沿着 z
i−1
轴平移 d
i
、绕 x
i
轴转
α
i
角、沿
着 x
i
轴平移 a
i
.用 R
R
R
∗
(
α
) 表示绕 ∗ 轴旋转
α
角的
齐次变换,用 T
T
T
∗
(d) 表示沿 ∗ 轴平移 d 的齐次变换
(下同),将 sin(∗) 和 cos(∗) 缩写为 s、c,联合的变
换可表示为
i−1
i
T
T
T = R
R
R
z
i−1
(
θ
i
)T
T
T
z
i−1
(d
i
)T
T
T
x
i
(a
i
)R
R
R
x
i
(
α
i
)
=
c
θ
i
−s
θ
i
c
α
i
s
θ
i
s
α
i
a
i
c
θ
i
s
θ
i
c
θ
i
c
α
i
−c
θ
i
s
α
i
a
i
s
θ
i
0 s
α
i
c
α
i
d
i
0 0 0 1
(4)
根据上文所述,获取机器人杆件 D-H 参数的关
键是获得机器人的各关节轴线.轴线测量法就是通
过对机器人单轴动作时的多组 TCP 的准确空间位
置进行拟合获取机器人的关节轴线.工业机器人的
关节有 2 种常见的形式,旋转关节和棱柱关节.两
种形式的关节轴线获取方式如下:
(1) 对于旋转关节,可通过空间圆拟合,获得
轴线向量.空间圆方程可表示为
ax + by + cz + d = 0
(x −x
0
)
2
+ (y −y
0
)
2
+ (z −z
0
)
2
= R
2
ax
0
+ by
0
+ cz
0
+ d = 0
(5)
其 中, ax + by + cz + d = 0 为 空间 圆 所 在 平面 的
方程,(x −x
0
)
2
+ (y −y
0
)
2
+ (z −z
0
)
2
= R
2
为球面方
程,设机器人某个轴单独运动时,每个姿态对应的
TCP 的空间位置为 p
p
p
i
= (x
i
,y
i
,z
i
) (i = 1, ···,n),令
˜
p
p
p
i
= (x
i
,y
i
,z
i
,1)(i = 1, ··· ,n),由于是单轴运动,所
以对应的 TCP 点应该在同一平面上,拟合 TCP 所
在空间平面方程得:
˜
p
p
p
T
1
˜
p
p
p
T
2
.
.
.
˜
p
p
p
T
N
a
b
c
d
= 0 (6)
剩余10页未读,继续阅读
2021-08-14 上传
2017-07-02 上传
2022-03-27 上传
2021-08-14 上传
2021-08-14 上传
点击了解资源详情
2021-08-13 上传

tracestudio
- 粉丝: 3
- 资源: 23
 我的内容管理
展开
我的内容管理
展开







最新资源
- 高清艺术文字图标资源,PNG和ICO格式免费下载
- mui框架HTML5应用界面组件使用示例教程
- Vue.js开发利器:chrome-vue-devtools插件解析
- 掌握ElectronBrowserJS:打造跨平台电子应用
- 前端导师教程:构建与部署社交证明页面
- Java多线程与线程安全在断点续传中的实现
- 免Root一键卸载安卓预装应用教程
- 易语言实现高级表格滚动条完美控制技巧
- 超声波测距尺的源码实现
- 数据可视化与交互:构建易用的数据界面
- 实现Discourse外聘回复自动标记的简易插件
- 链表的头插法与尾插法实现及长度计算
- Playwright与Typescript及Mocha集成:自动化UI测试实践指南
- 128x128像素线性工具图标下载集合
- 易语言安装包程序增强版:智能导入与重复库过滤
- 利用AJAX与Spotify API在Google地图中探索世界音乐排行榜
