"基于单片机的两轮自平衡车控制系统设计及其实现"
13 浏览量
更新于2023-12-30
收藏 795KB DOCX 举报
基于单片机的两轮自平衡车控制系统设计摘要
本文设计了一种基于单片机的两轮自平衡车控制系统。两轮自平衡车属于一种高度不稳定的两轮机器人,与传统的倒立摆类似,其本质上是不稳定的,必须采取有效的控制手段才能使其保持平衡。本文提出了一种设计方案,使用重力加速度陀螺仪传感器MPU-6050来检测小车的姿态,并利用互补滤波算法将陀螺仪数据和加速度计数据进行数据融合。系统采用STC公司的8位单片机STC12C5A60S2作为主控制器,根据传感器获取的数据,经过PID算法处理后,输出控制信号到电机驱动芯片TB6612FNG,以控制小车的两个电机,使其保持平衡状态。
在整个系统制作完成后,小车能够在无人干预的情况下实现自主平衡。同时,即使在引入适量干扰的情况下,小车也能够自主调整并迅速恢复至稳定状态。通过蓝牙通信,还可以通过手机等设备控制小车前进、后退、左右转等操作。
关键词:两轮自平衡小车、加速度计、陀螺仪、数据融合、滤波、PID算法。
引言
两轮自平衡车是一种具有挑战性的机器人系统,对于控制算法和硬件设计提出了严格的要求。在过去的几年里,两轮自平衡车逐渐受到了广泛的关注,并被应用于许多领域,如运动娱乐、室内导航、物流配送等。本文旨在设计一套稳定可靠的控制系统,使两轮自平衡车能够实现自主平衡,并能够通过外部设备进行远程控制。
设计方案
本文提出的控制系统设计方案主要包括硬件设计和软件设计两个部分。
硬件设计
主控制器采用了STC公司的8位单片机STC12C5A60S2,具有丰富的外设接口和较高的运算速度。重力加速度陀螺仪传感器MPU-6050被用来检测小车的姿态,可以实时获取小车的倾斜角度。电机驱动芯片TB6612FNG用于控制小车的两个电机,通过调节电机的速度来实现平衡控制。
软件设计
软件设计主要包括数据采集、数据融合、PID算法处理、电机控制等部分。通过SPI接口与传感器进行通信,获取陀螺仪和加速度计的数据。利用互补滤波算法将陀螺仪数据和加速度计数据进行融合,得到更为准确的姿态信息。PID算法根据姿态信息计算出控制信号,通过PWM信号驱动电机驱动芯片,实现对两个电机的控制。
实验结果
通过对设计的两轮自平衡车进行实验,验证了系统的稳定性和可靠性。在无人干预的情况下,小车能够实现自主平衡,并能够及时调整姿态以保持平衡。同时,在引入适量干扰的情况下,系统能够迅速恢复至稳定状态。通过蓝牙通信,可以实现对小车的远程控制,包括前进、后退、左右转等功能。
总结与展望
本文设计了一套基于单片机的两轮自平衡车控制系统,通过重力加速度陀螺仪传感器检测小车姿态,并采用互补滤波算法进行数据融合,通过PID算法处理后输出控制信号,通过电机驱动芯片驱动电机,实现对小车的自主平衡。实验结果表明,设计的控制系统具有稳定性和可靠性,能够在不同环境条件下实现自主平衡,为进一步应用于各种实际场景提供了基础。未来的研究可以进一步优化算法和硬件设计,提高系统性能,并将两轮自平衡车应用于更多实际应用领域,如物流配送、室内导航等。
4
制>速度控制>转向控制。由于小车同时受到三种控制的影响,从平衡控制角度来
看,其他两个控制就成为了它的干扰。因此对小车速度、方向的控制应该尽量保
持平滑,以减少对平衡控制的干扰。
上述三种控制各自独立进行,它们各自假设其他两个控制都已经达到稳定。
比如控制小车加速和减速的时候,平衡控制一直在起作用,它会自动改变小车的
倾角,使小车实现加速和减速。
3.2 控制原理
生活中有很多直立控制的例子,例如一个正常人可以经过简单的练习,让一
根直木棒在水平的掌心中保持直立。这需要两个条件:一是托着木棒的手掌可以
移动;二是眼睛可以观察到木棒的倾斜角和倾斜趋势(角加速度)。可以通过手
掌的移动抵消木棒的倾斜角度和趋势,从而保持木棒的直立。这两个条件缺一不
可,这就是控制中的负反馈机制。
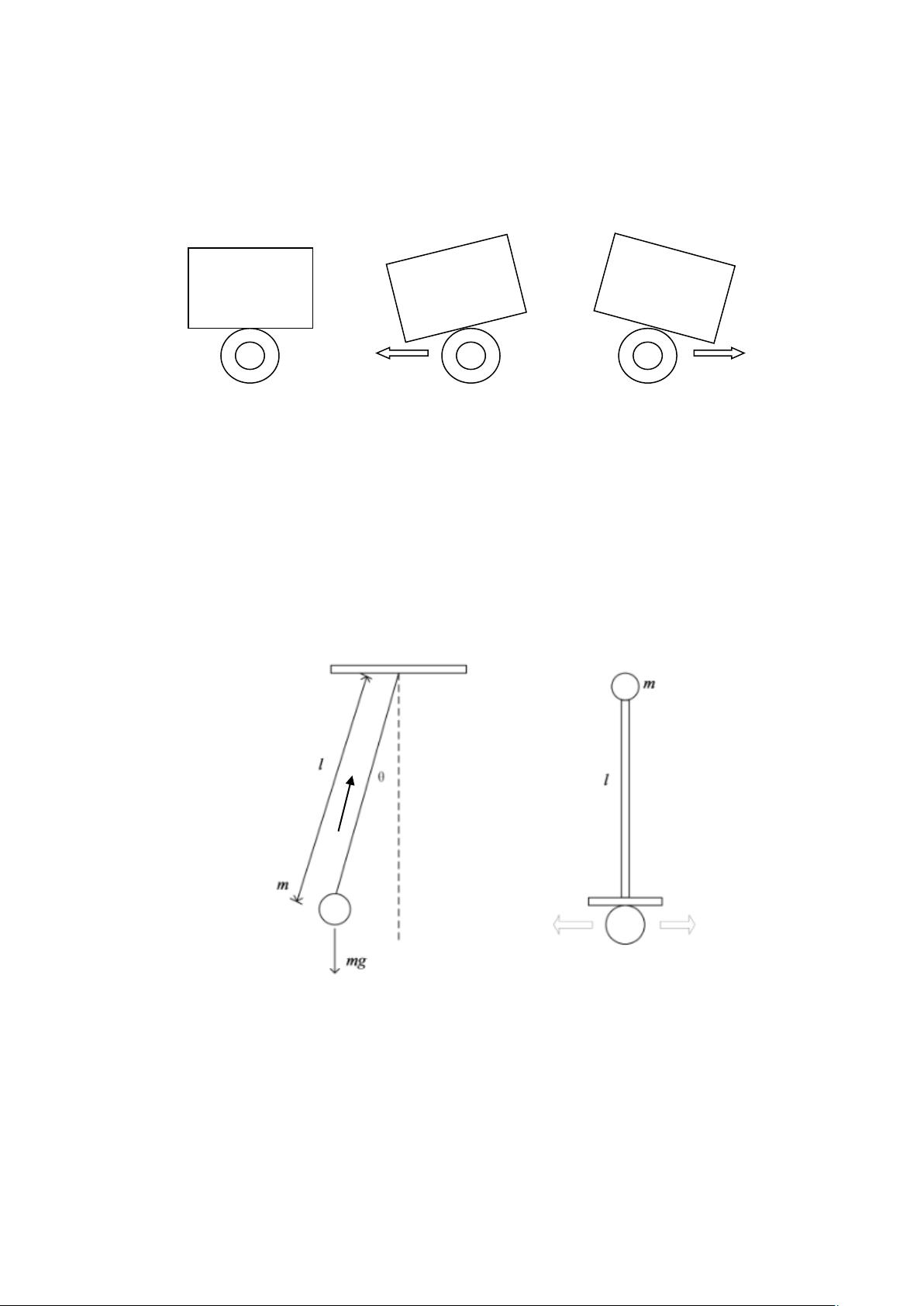
小车的直立也是通过负反馈实现的,但相对于上面的例子来说相对简单,因
为小车有两个车轮着地,因此车体只会在一个平面内发生倾斜。控制车轮转动便
可抵消倾斜的趋势从而保持车体直立。
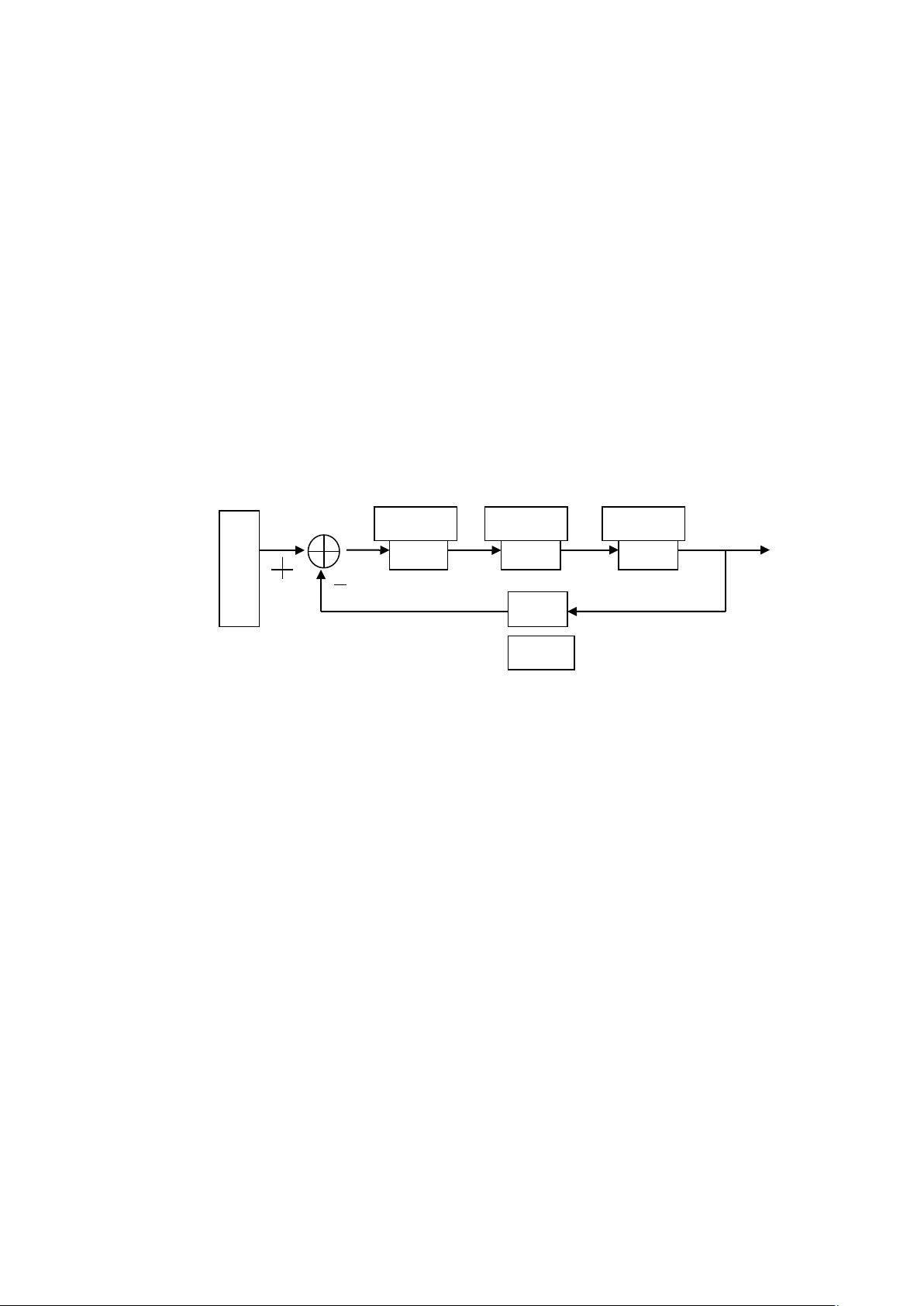
大脑
手掌
木棒
眼睛
控
制
给
定
控制算法
执行机构
控制对象
传感器
图 3.1 保持木棍直立的反馈控制系统
剩余43页未读,继续阅读
219 浏览量
102 浏览量
2023-07-01 上传

matlab大师
- 粉丝: 2861
 我的内容管理
展开
我的内容管理
展开







最新资源
- 昆仑通态MCGS嵌入版_XMTJ温度巡检仪软件包解压教程
- MultiBaC:掌握单次与多次组批处理校正技术
- 俄罗斯方块C/C++源代码及开发环境文件分享
- 打造Android跳动频谱显示应用
- VC++实现图片处理的小波变换方法
- 商城产品图片放大镜效果的实现与用户体验提升
- 全新发布:jQuery EasyUI 1.5.5中文API及开发工具包
- MATLAB卡尔曼滤波运动目标检测源代码及数据集
- DoxiePHP:一个PHP开发者的辅助工具
- 200mW 6MHz小功率调幅发射机设计与仿真
- SSD7课程练习10答案解析
- 机器人原理的MATLAB仿真实现
- Chromium 80.0.3958.0版本发布,Chrome工程版新功能体验
- Python实现的贵金属追踪工具Goldbug介绍
- Silverlight开源文件上传工具应用与介绍
- 简化瀑布流组件实现与应用示例
