第七届全国大学生飞思卡尔智能车竞赛电磁组直立行车设计方案解析
需积分: 25 115 浏览量
更新于2024-07-29
收藏 6.12MB PDF 举报
"飞思卡尔智能车设计方案"
该文档详述了第七届全国大学生"飞思卡尔"杯智能汽车竞赛中电磁组的直立行车参考设计方案,旨在帮助参赛者理解和构建能够直立行走的智能车模。这份方案涵盖了从硬件到软件的全面设计,包括微处理器的应用和各种控制技术。
在原理篇中,方案首先介绍了直立行走任务的分解,将任务分为直立控制、速度控制和方向控制。直立控制涉及车模如何保持稳定,通常需要用到倾角传感器来检测车模的倾斜角度,然后通过控制算法调整电机转速以保持平衡。速度控制部分讨论了如何精准控制车模的行驶速度,可能采用PID等控制算法。方向控制则关乎车模如何根据赛道的弯道和直线调整行驶方向,可能涉及到电磁线检测电路。
电路设计篇中,整体电路框图展示了系统的基本构成,包括微控制器(如飞思卡尔的DSC)、倾角传感器、电机驱动电路、速度传感器以及电磁线检测电路。DSC(Digital Signal Controller)是微处理器的一种,用于处理实时信号和执行控制算法。倾角传感器电路用于获取车模的倾斜信息,电机驱动电路则负责控制电机的旋转,速度传感器用于检测车模速度,而电磁线检测电路帮助车模识别赛道路径。
机械设计篇主要涉及车模的结构改装,包括简化车模结构以适应直立行走,传感器的安装位置和方式,以及在制作过程中需要注意的事项,以确保车模的稳定性和可靠性。
软件编写与调试篇讲解了软件的功能框架,DSC的资源配置,主要控制算法的实现(如PID算法),以及程序调试和参数整定的方法。这部分内容对于实现精确控制至关重要,因为软件是智能车模大脑,它接收传感器数据并生成控制指令。
最后,方案还包含了一些现场运行测试的实践经验,以供参赛者参考,帮助他们在实际比赛中更好地应对各种情况。
这个设计方案是一份综合性的指南,涵盖了从理论到实践的所有关键要素,旨在帮助参赛者构建一个能在电磁赛道上稳定直立行走的智能车模。通过这份方案,参赛者可以学习到微控制器应用、传感器技术、控制算法以及电子电路设计等多个方面的知识,这对于提升他们的工程实践能力和创新能力具有重要意义。
9
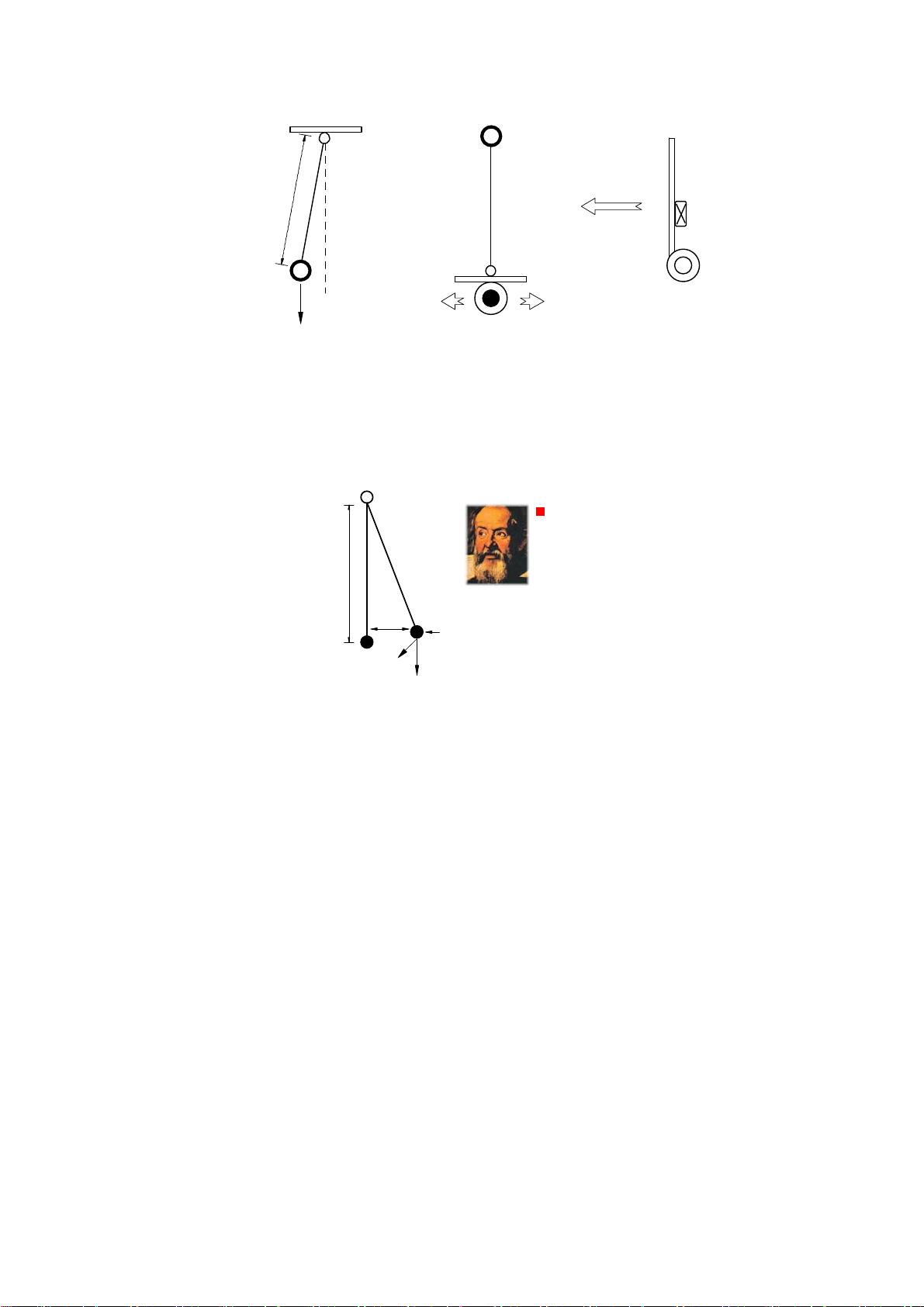
图 2.5 车模可以简化成倒立的单摆
普通的单摆受力分析如图 2.6 所示。
图 2.6 普通的单摆受力分析
当物体离开垂直的平衡位置之后,便会受到重力与悬线的作用合力,驱动重物回复
平衡位置。这个力称之为回复力,其大小为
sinFmg mg
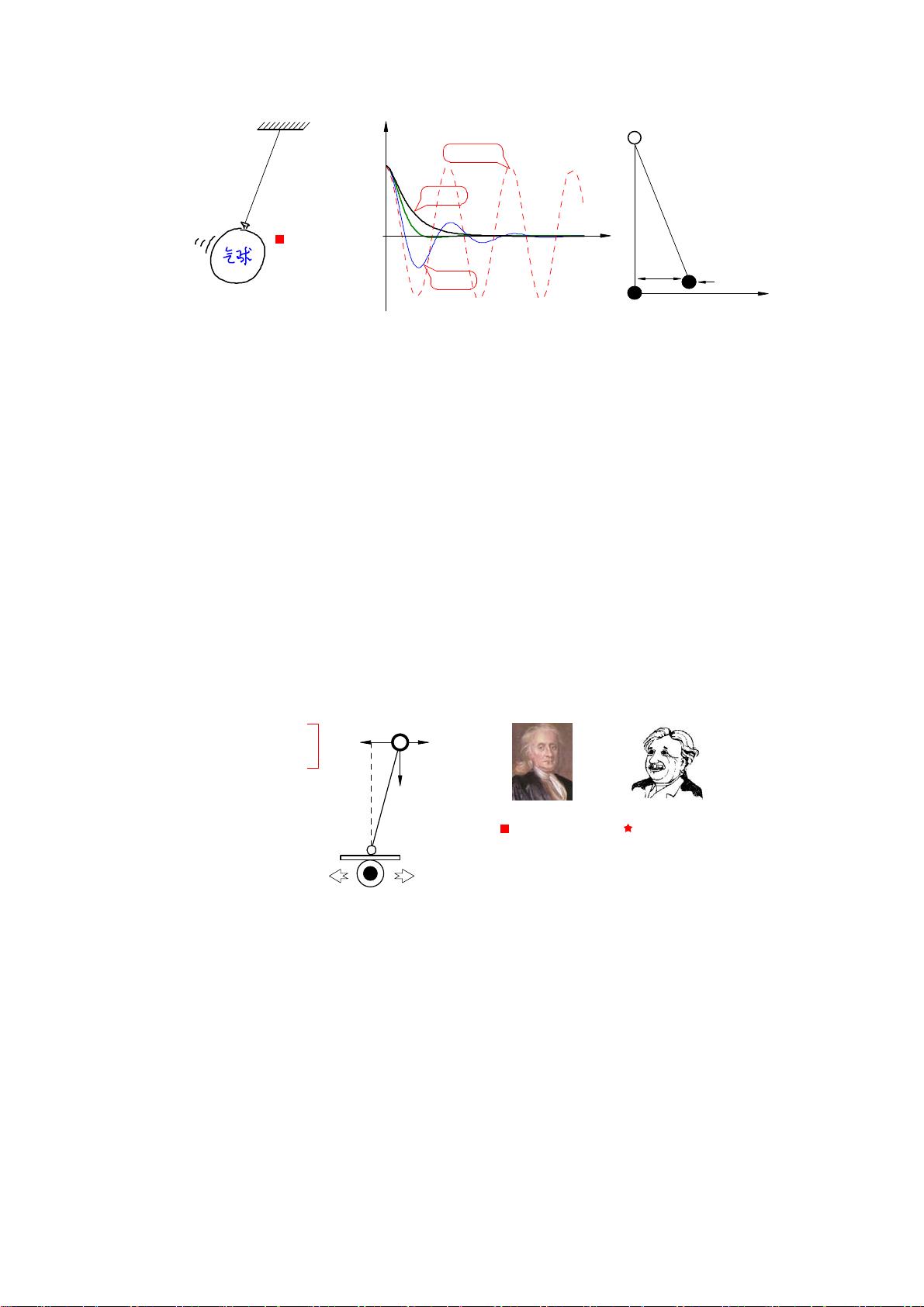
在此回复力作用下,单摆便进行周期运动。在空气中运动的单摆,由于受到空气的
阻尼力,单摆最终会停止在垂直平衡位置。空气的阻尼力与单摆运行速度成正比,方向
相反。阻尼力越大,单摆越会尽快在垂直位置稳定下来。图 2.7 显示出不同阻尼系数下,
单摆的运动曲线。
m
l
mg
θ
a
m
l
车模
简化
底部可以
运动的倒
立单摆
单摆模型
θ
l
sinθ
F=mg
l
质心
m
mgsinθ
伽利略
据说伽利略通
过观察吊灯的
摆动发现了单
摆运动的等时
性。
剩余48页未读,继续阅读
2022-06-17 上传
190 浏览量
108 浏览量
828 浏览量
430 浏览量
155 浏览量
2009-11-10 上传
115 浏览量

zclovesyt
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 四星电子 蓝牙串口设置软件.zip
- matlab代码sqrt-matlab-mastodon-importer:用于Mastodon文件的MATLAB导入器
- Kpo4317_DJR_Lab4_test
- 高漫8600数位板驱动程序 for xp/win7/mac 官方最新版
- 棋
- C-Sharp:具有作业的C#工作和代码实践
- 拉手移动式
- matlab代码sqrt-AsuMathLabG01:实施数学库软件。类似于Matlab,Octave和类似工具
- maven-archetype-quickstart-1.1.zip
- 四星电子 SX Virtual Link连接软件.zip
- 聊天应用程序:使用套接字的实时聊天应用程序
- Spring-Semester-2021-IIT-B-Notes:这些是我在IIT-B的2021年Spring学期的笔记。它们是对幻灯片的补充,仅包含教授在讲座中说过的部分,但除我自己的观察外,幻灯片中未提及
- Programing-Language-C:为大学活动开发的简单程序
- SEE Electrical V7R2 2014最新版本抢先试用.zip
- genetic-algorithm:遗传算法解决背包问题。 动态参数选择
- 文华指数数据服务API接口说明
