改进的正弦余弦算法:破解高维全局优化挑战
76 浏览量
更新于2024-07-15
收藏 1.38MB PDF 举报
本文主要探讨了在解决高维全局优化问题时,如何通过改进的正弦余弦算法(Sine Cosine Algorithm, SCA)实现更高效和精确的搜索策略。正弦余弦算法作为一种相对较新的群体智能优化技术,起源于其独特的结合了正弦和余弦函数的特性,能够在多种复杂优化场景下展现出良好的性能。高维优化问题因其搜索空间庞大且易陷入局部最优,对算法的全局探索能力和收敛速度提出了严峻挑战。
在传统SCA的基础上,研究者提出了一种改进方法,可能包括了以下几点创新:
1. **适应性权重调整**:针对高维优化中的问题,文章可能讨论了如何动态调整惯性权重,以更好地平衡全局搜索与局部搜索之间的平衡。这有助于算法在保持全局视野的同时,避免在复杂的搜索空间中陷入局部最优。
2. **新颖搜索策略**:改进的算法可能会引入新的搜索策略或者操作,例如利用多峰搜索、混沌行为或者突变操作来增强算法的多样性,提高在高维空间中的寻优能力。
3. **局部信息融合**:可能考虑将局部搜索的结果与全局搜索相结合,通过某种机制整合个体的局部最优解,以提升整体优化效果。
4. **收敛性分析**:文章可能对改进算法的收敛速度和稳定性进行了理论分析,确保在高维问题上仍具有良好的收敛性能。
5. **工程设计优化应用**:由于关键词提及“工程设计优化”,可以推测该研究还可能展示了改进SCA在实际工程设计问题中的应用实例,验证了其在实际问题中的实用性和有效性。
6. **实证研究与结果**:论文详细介绍了实验设置、数据集和评价指标,通过对比实验结果,展示了改进SCA在高维全局优化任务中相对于传统SCA及其他优化算法的优势,如搜索效率、精度和稳定性等。
这篇文章深入研究了如何通过改进正弦余弦算法来处理高维全局优化问题,通过实证分析和理论支持,提供了一种有效的优化策略,为复杂工程优化问题的求解提供了新的思路和技术支撑。这对于理解群体智能优化算法的发展趋势以及实际应用具有重要意义。
W. Long, T. Wu and X. Liang et al. / Expert Systems With Applications 123 (2019) 108–126 111
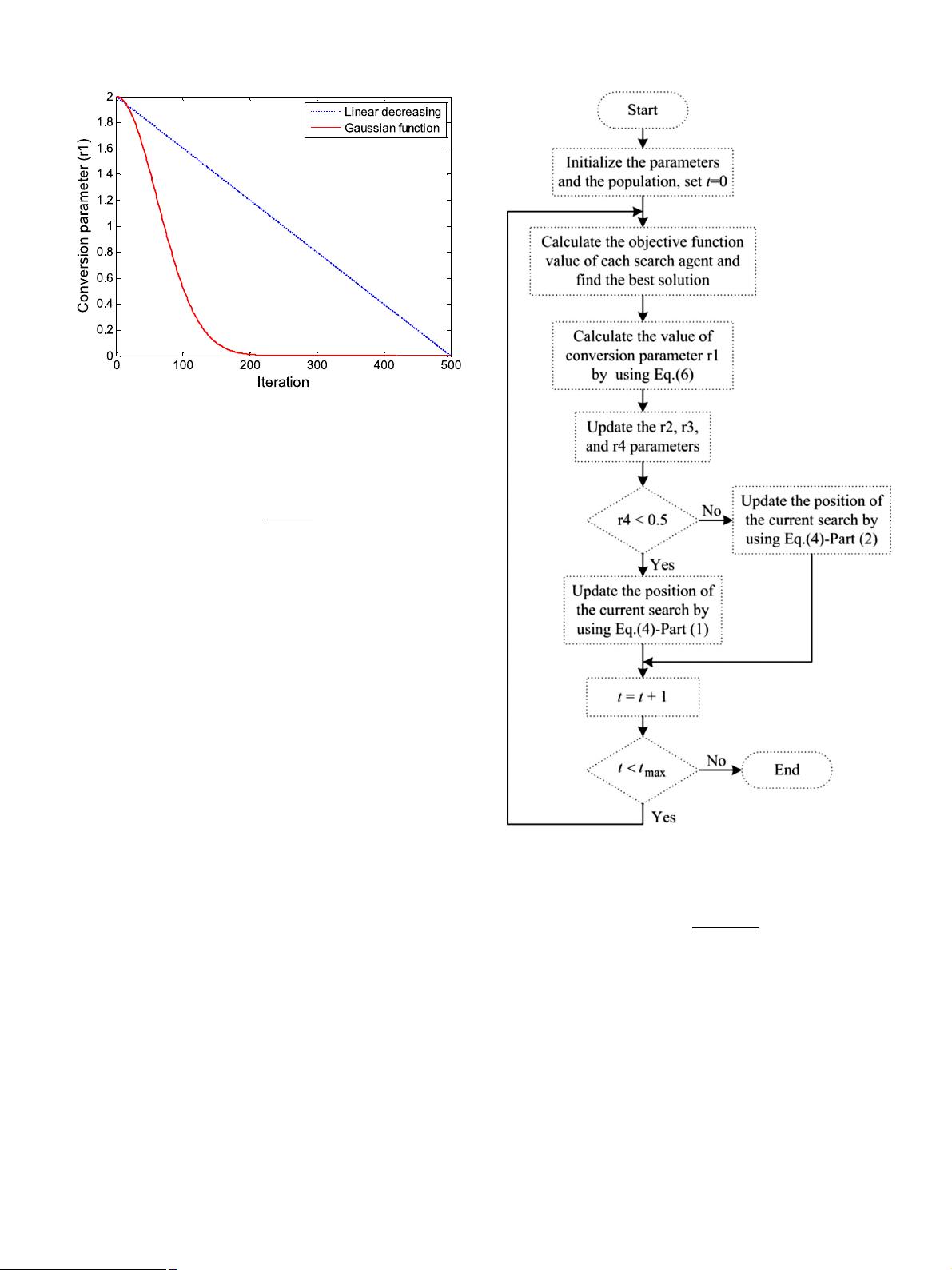
Fig. 1. The conversion parameter r
1
curve of linear decreasing and Gaussian func-
tion.
decreased from a start value ( w
start
) to an end value ( w
end
) accord-
ing to the following equation:
w
(
t
)
= w
end
+
(
w
start
− w
end
)
×
t
max
−t
t
(5)
Compared with the position-updating Eq. (2) in the conven-
tional SCA, Eq. (4) can yield more information to the position-
updating equation and generate a more promising candidate so-
lution to improve the performance of the proposed SCA algorithm.
4.2. Modified conversion parameter strategy
All population-based optimization algorithms aim to achieve
a balance in both the exploration and exploitation to obtain the
promising regions of the search space and eventually converge to
the global optimum. In the population- based optimization ap-
proaches, exploration refers to the ability to investigate various un-
known regions in the search space to identify the global optimum.
Exploitation refers to the ability to apply the knowledge of the pre-
vious satisfactory solution to obtain better solutions ( Luo, Wang, &
Xiao, 2013 ). Further, the abilities of exploration and exploitation in
every population-based search algorithm are applied with specific
operators.
According to Mirjalili (2016) , four primary parameters exist in
the conversional SCA: r
1
, r
2
, r
3
, and r
4
, where r
1
is the most critical
parameter that converts from exploration to exploitation using an
adaptive range in the sine and cosine functions. A larger conversion
parameter r
1
facilitates global exploration, while a smaller conver-
sion parameter ( r
1
) facilitates local exploitation. A suitable selec-
tion of conversion parameter r
1
can provide a balance between
global exploration and local exploitation. However, in the conven-
tional SCA, the value of r
1
decreases linearly from a to zero us-
ing the Eq. (2) . In the beginning stage of the optimization process,
the conversion parameter r
1
for the linearly decreasing strategy is
good at exploration but poor at convergence; in the later stage of
the search process, this strategy is good at exploitation but easily
trapped in the local optima. Additionally, because the search pro-
cess of the SCA is nonlinear and highly complicated, the linearly
decreasing conversion parameter r
1
cannot truly reflect the actual
search process.
Therefore, we herein modify the conversion parameter r
1
equa-
tion described by Eq. (3) , and present a new conversion parameter
r
1
for the nonlinearly decreasing strategy based on the Gaussian
Fig. 2. The flowchart of the proposed ISCA.
function as follows:
r
1
(
t
)
=
(
a
start
− a
end
)
× exp
−
t
2
(
k ×t
max
)
2
+ a
end
(6)
where t indicates the current iteration, t
max
indicates the total
number of iterations, k is the nonlinear modulation index, and
a
start
and a
end
are the initial and final values of constant a , respec-
tively. Fig. 1 shows the comparison curve of the linearly decreasing
strategy and the Gaussian function decreasing strategy.
In summary, we combined the proposed modified position-
updating equation and the modified conversion parameter strat-
egy and developed the ISCA algorithm. The flowchart of the ISCA
is shown in Fig. 2 .
4.3. Computational complexity
The time complexities of the SCA and ISCA are described as fol-
lows: 1) SCA and ISCA initialization require the O ( N ) time, where
剩余18页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-11-05 上传
2023-02-23 上传
2018-10-09 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情

weixin_38517728
- 粉丝: 5
- 资源: 919
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入浅出:自定义 Grunt 任务的实践指南
- 网络物理突变工具的多点路径规划实现与分析
- multifeed: 实现多作者间的超核心共享与同步技术
- C++商品交易系统实习项目详细要求
- macOS系统Python模块whl包安装教程
- 掌握fullstackJS:构建React框架与快速开发应用
- React-Purify: 实现React组件纯净方法的工具介绍
- deck.js:构建现代HTML演示的JavaScript库
- nunn:现代C++17实现的机器学习库开源项目
- Python安装包 Acquisition-4.12-cp35-cp35m-win_amd64.whl.zip 使用说明
- Amaranthus-tuberculatus基因组分析脚本集
- Ubuntu 12.04下Realtek RTL8821AE驱动的向后移植指南
- 掌握Jest环境下的最新jsdom功能
- CAGI Toolkit:开源Asterisk PBX的AGI应用开发
- MyDropDemo: 体验QGraphicsView的拖放功能
- 远程FPGA平台上的Quartus II17.1 LCD色块闪烁现象解析
