STM32F103控制的自动往返电动小汽车设计
版权申诉
122 浏览量
更新于2024-06-29
收藏 730KB DOCX 举报
"基于STM32控制的自动往返电动小汽车"
本设计项目是关于使用STM32微控制器来实现一款自动往返电动小汽车的控制系统。STM32是意法半导体(ST)公司推出的基于ARM Cortex-M3内核的32位微控制器系列,因其高效能、低功耗和丰富的外设接口而在工业和消费电子领域广泛应用。在这个项目中,具体使用的是STM32F103型号,该芯片具有较高的处理能力和灵活的配置选项。
小汽车的行驶路径识别依赖于反射式红外传感器,这种传感器可以检测路面的黑白差异,从而判断小汽车是否偏离黑线路径。通过PWM(脉宽调制)技术,系统能够动态调整电动机的转速,以实现小汽车的精确速度控制。在遇到限速或压线情况时,车辆能够及时做出反应,如调速、急刹车、停车以及倒车返回起点。
在软件层面,设计中采用了模糊控制算法,这种算法能够根据实时路况和设定规则,对速度进行灵活调整,提高控制精度。模糊控制与PWM的结合确保了车辆在速度变化时的平稳性,实现了恒速控制。此外,系统还具备记录和显示往返时间及行驶距离的功能,并通过蜂鸣器提示小汽车何时返回起点。
在整个设计过程中,MATLAB仿真被用于验证和优化控制策略,尤其是对于从高速到低速的平滑调速过程。这有助于在实际硬件测试之前发现并解决问题,提高系统的可靠性和效率。
STM32F103的优势在于其强大的计算能力、高效的能源管理以及广泛的外设支持,使得它成为智能小车控制系统理想的微控制器选择。通过集成的串行通信接口、定时器和ADC(模数转换器)等功能,可以轻松连接和管理各种传感器和执行器,如电机驱动电路、显示电路和声音提示装置。
这个项目展示了STM32微控制器在嵌入式控制系统中的应用,特别是在自动控制和智能交通系统领域的潜力。通过巧妙结合硬件和软件技术,实现了自动往返电动小汽车的自主导航和精准控制,体现了现代微电子技术在提升设备智能化方面的强大作用。
运算、处理能力,来实现小车自动识别路线按迹行走、躲避障碍物,并且通过
LCD 显示器实时显示小车运动参数;配置 STM32F103 通用定时器为 PWM 输出
模式产生 PWM 波,通过步进调节 PWM 波占空比参数控制电机的转速。
第一章 系统方案论证与分析
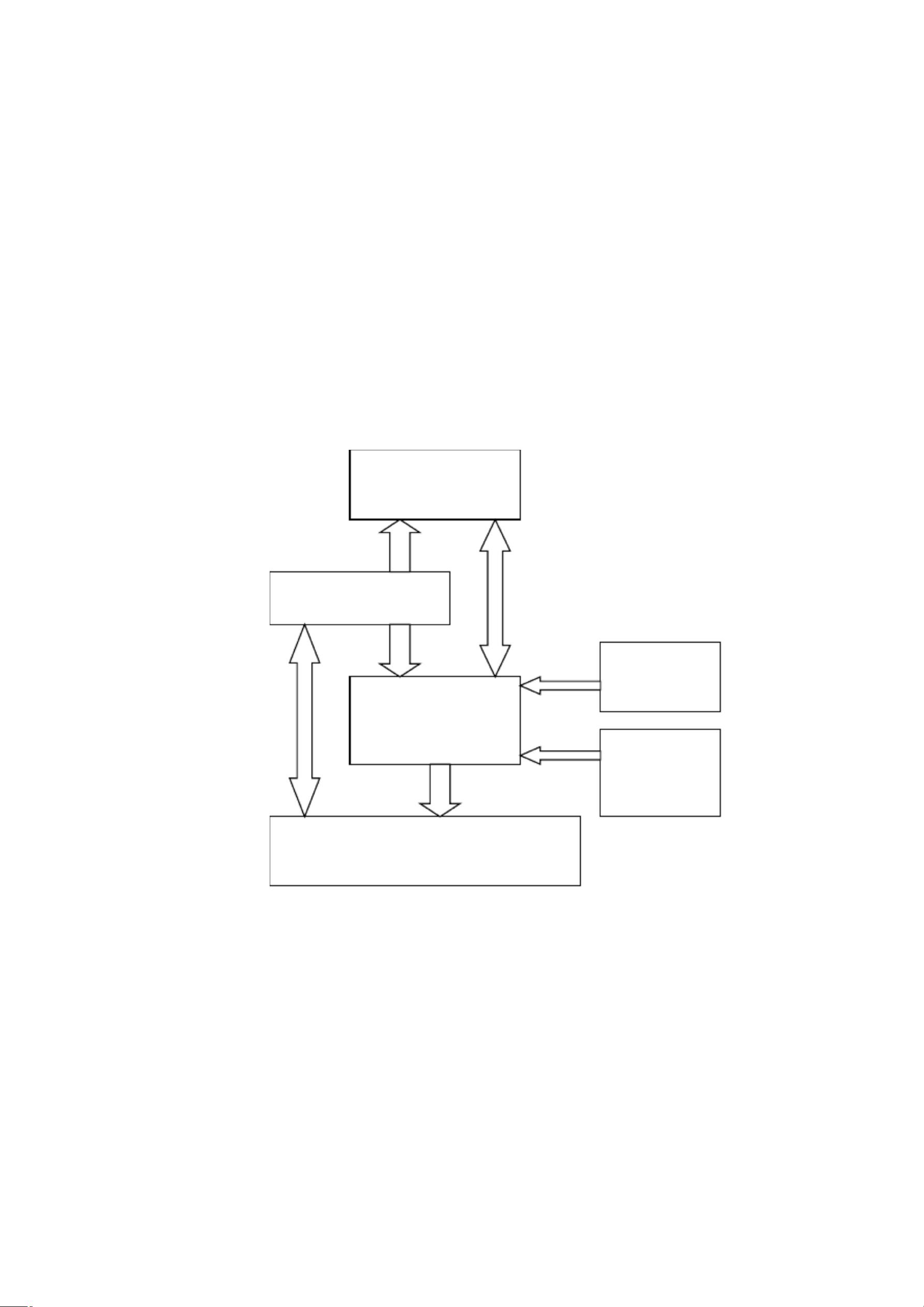
根据题目中的设计要求,本系统主要由主控单片机模块、电源模块、电机驱
动模块、黑线检测模块、测速模块以及液晶显示模块构成。本系统的方框图如下
图所示:
电源模块
STM32
黑 线 检 测 模
块
1、 主控单片机
根据题目要求,控制器主要用于控制电机的运动,黑线的检测以及相关信息
的显示。对于控制器的选择主要有以下两种方案:
方案一:采用 51 系列单片机作为控制器。51 系列单片机应用广泛,技
术成熟,但是运行速度慢,内部资源较少,且只有2 个定时计数器,不满足题目
要求。
方案二:采用 STM32 作为控制器。基于 Cortex- M3 内核的 STM32F10x 系
列芯片是新型的 32 位嵌入式微处理器,其性能优良,移植性好,提高了对直流
1
剩余14页未读,继续阅读
135 浏览量
2022-07-06 上传
888 浏览量
2021-09-13 上传
102 浏览量
228 浏览量

G11176593
- 粉丝: 6927
- 资源: 3万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Gdal 2.2.2 for .Net And .NetCore
- 微生物肥料项目计划书.zip
- mhygepdf:多元超几何概率密度函数。-matlab开发
- 寄存器查看工具,十六进制,十进制显示二进制值
- EchartConvert:图表生成
- gestionStudent
- Typersion:最好的打字练习游戏! 在免费游戏和冒险模式之间进行选择,后者是一种rpg式的砍杀模式,目标是达到第100阶段! 每五个阶段都会受到迷你小老板的挑战,在您面对越来越强的敌人时提高打字速度!
- 联体别墅设计施工图
- CUDA MEX:在 MATLAB 中编译 CUDA! 只需编写 cuda_mex filename.cu 就可以了。-matlab开发
- redisclient-win32.x86.2.0.rar
- PRNICT:硬件
- Platzi徽章
- MySQL-python-1.2.5-cp27-none-win-amd64.whl的zip安装包
- 两款css+html打造的超炫酷的网站在线客服代码,鼠标划过可以弹出在线客服窗口
- SDL2 i.MX6ULL移植包
- 基于vue2.0实现的滑动进度条
