控制系统动态数学模型详解:微分方程与传递函数
需积分: 0 16 浏览量
更新于2024-07-16
收藏 1.85MB PDF 举报
第二章《数据模型》主要探讨了控制系统的动态数学建模方法和概念,这是理工科特别是工程领域中不可或缺的一部分。章节内容涵盖了以下几个核心知识点:
1. 微分方程的建立:这是构建数学模型的基础,包括解析法和实验法。解析法是根据系统元件间的物理或化学规律直接推导出数学关系,而实验法则通过实际操作收集数据,然后通过拟合找到模型。模型需体现系统内在特性,同时兼顾简洁性和精确性。
2. 数学模型的形式:数学模型有多种表述方式,如时间域中的微分方程、差分方程和状态方程,复数域的传递函数和结构图,以及频率域的频率特性。这些形式各有其优势,如微分方程直观地描述输入与输出的关系,状态方程适合处理多变量和非线性系统。
3. 系统方框图及其简化:通过系统信号流图展示控制系统的结构,这是一种可视化工具,有助于理解和分析复杂系统。梅逊公式在此处用于简化系统图,减少计算复杂性。
4. 受控机械对象数学模型:特定于机械系统的数学模型,考虑了机械运动学和动力学因素,为控制器设计提供基础。
5. 控制系统传递函数:这是系统动态特性的关键,传递函数反映了系统对输入信号的响应,是分析系统性能的重要工具。
6. 教学要求与重点:学生需要掌握微分方程的建立方法、拉氏变换及其应用、控制系统结构图的简化和梅逊公式。其中,控制系统结构图的简化可能是教学中的难点。
7. 建立数学模型的一般步骤:从系统工作原理出发,确定输入和输出,列出元件的动态方程,消去中间变量,最终标准化方程,得到输入与输出的直接关系。
通过本章的学习,学生将深入理解如何运用数学工具来描述和分析控制系统的动态行为,这对于工程设计、控制系统分析和优化至关重要。掌握这些技能对于从事自动化、控制工程等相关领域的专业人士来说是必不可少的。
2
a a a a T e
2
Ti
d (t) d (t)
L J +(L D R J ) R D K K (t)
dt dt
K e (t)
( +)
2
0
i a a a T
T
ae
E ( s ) S[L JS (L D R J )S R D
K
KK
(s)
( +)]
a
R
忽略
a
L
忽略
d (t)
(t)
dt
0
0 0 0
32
a a a a T e T
32
i
d (t) d (t) d (t)
L J +(L D R J ) R D K K
dt dt dt
K e (t)
( +)
2
0
i a T e
T
E ( s ) S[ LaJS L D S
K
KK
(s)
( )]
0
ie
1
E ( s ) K S
(s)
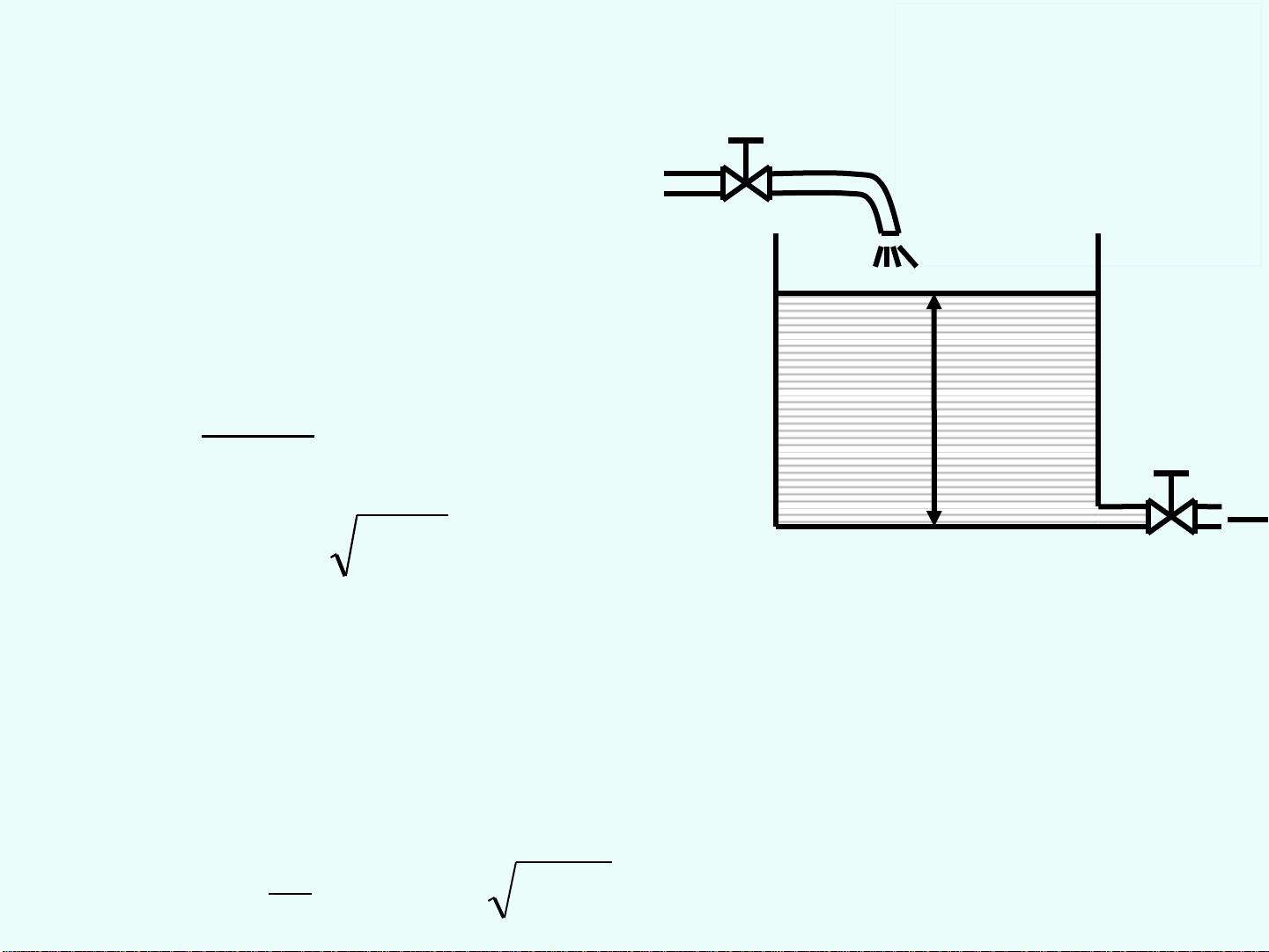
微分方程的建立
剩余187页未读,继续阅读
128 浏览量
点击了解资源详情
106 浏览量
245 浏览量
168 浏览量
162 浏览量
128 浏览量
2021-10-10 上传
166 浏览量

liberty11911
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- C语言实现LED灯控制的源码教程及使用说明
- zxingdemo实现高效条形码扫描技术解析
- Android项目实践:RecyclerView与Grid View的高效布局
- .NET分层架构的优势与实战应用
- Unity中实现百度人脸识别登录教程
- 解决ListView和ViewPager及TabHost的触摸冲突
- 轻松实现ASP购物车功能的源码及数据库下载
- 电脑刷新慢的快速解决方法
- Condor Framework: 构建高性能Node.js GRPC服务的Alpha框架
- 社交媒体图像中的抗议与暴力检测模型实现
- Android Support Library v4 安装与配置教程
- Android中文API合集——中文翻译组出品
- 暗组计算机远程管理软件V1.0 - 远程控制与管理工具
- NVIDIA GPU深度学习环境搭建全攻略
- 丰富的人物行走动画素材库
- 高效汉字拼音转换工具TinyPinYin_v2.0.3发布
